|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Simulated sonar for NPS simulator. More...
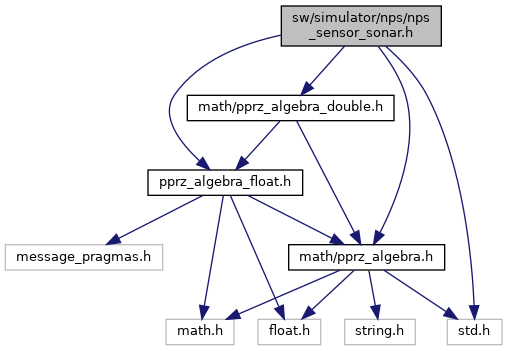
#include "math/pprz_algebra.h"#include "math/pprz_algebra_double.h"#include "math/pprz_algebra_float.h"#include "std.h" Include dependency graph for nps_sensor_sonar.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nps_sensor_sonar.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | NpsSensorSonar |
Functions | |
| void | nps_sensor_sonar_init (struct NpsSensorSonar *sonar, double time) |
| void | nps_sensor_sonar_run_step (struct NpsSensorSonar *sonar, double time) |
Simulated sonar for NPS simulator.
Definition in file nps_sensor_sonar.h.
| struct NpsSensorSonar |
|
extern |
Definition at line 60 of file nps_sensor_sonar.c.
References FALSE, NPS_SONAR_NOISE_STD_DEV, NPS_SONAR_OFFSET, sonar, and time.
Referenced by nps_sensors_init().
Here is the caller graph for this function:
|
extern |
Definition at line 70 of file nps_sensor_sonar.c.
References NpsFdm::agl, fdm, foo, get_gaussian_noise(), NPS_SONAR_DT, NPS_SONAR_MAX_DIST, NPS_SONAR_MIN_DIST, sonar, and TRUE.
Referenced by nps_sensors_run_step().
Here is the call graph for this function: Here is the caller graph for this function: