|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
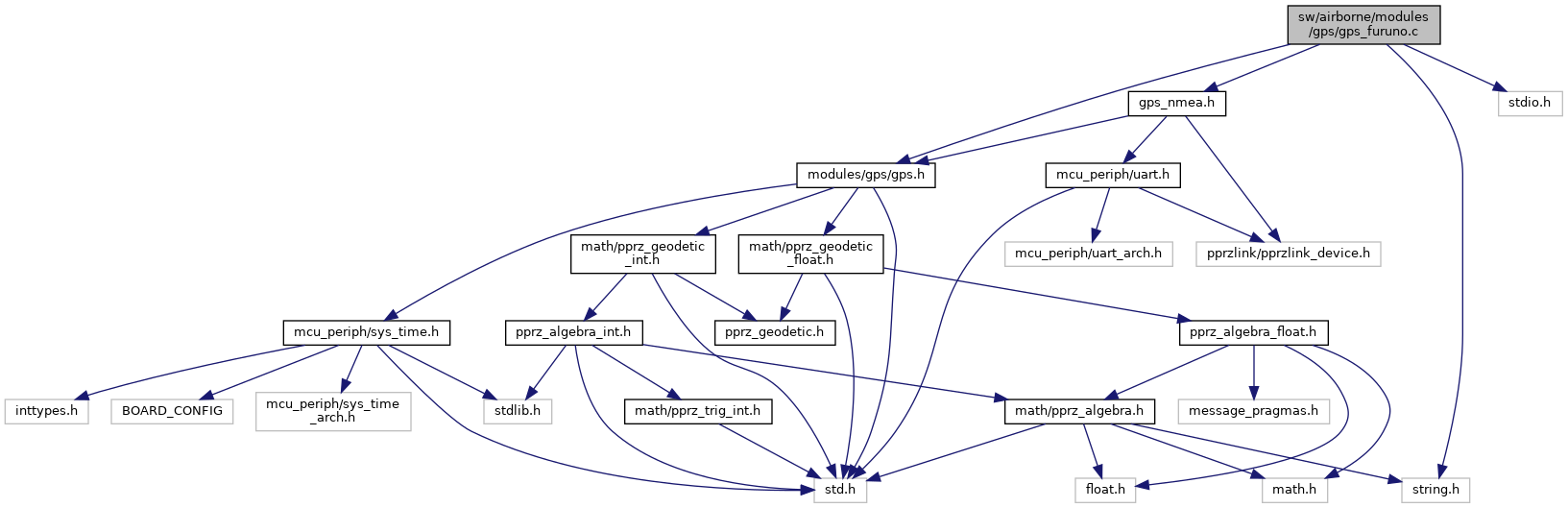
GPS furuno based NMEA parser. More...
 Include dependency graph for gps_furuno.c:
Include dependency graph for gps_furuno.c:Go to the source code of this file.
Macros | |
| #define | GPS_FURUNO_SETTINGS_NB 18 |
| #define | GpsLinkDevice (&(NMEA_GPS_LINK).device) |
Functions | |
| static bool | nmea_parse_perdcrv (void) |
| void | nmea_configure (void) |
| Configure furuno GPS. | |
| void | nmea_parse_prop_init (void) |
| bool | nmea_parse_prop_msg (void) |
Variables | |
| static const char * | gps_furuno_settings [GPS_FURUNO_SETTINGS_NB] |
| static uint8_t | furuno_cfg_cnt = 0 |
GPS furuno based NMEA parser.
Definition in file gps_furuno.c.
| #define GPS_FURUNO_SETTINGS_NB 18 |
Definition at line 34 of file gps_furuno.c.
| #define GpsLinkDevice (&(NMEA_GPS_LINK).device) |
Definition at line 60 of file gps_furuno.c.
Configure furuno GPS.
The function to be called when a characted from the device is available.
Sets gps_nmea.is_configured to TRUE if all config msgs are sent.
Definition at line 66 of file gps_furuno.c.
References fd, foo, furuno_cfg_cnt, gps_furuno_settings, GPS_FURUNO_SETTINGS_NB, gps_nmea, GpsLinkDevice, GpsNmea::is_configured, and nmea_calc_crc().
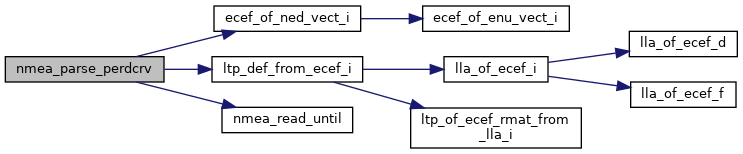
Here is the call graph for this function:Definition at line 104 of file gps_furuno.c.
References ecef_of_ned_vect_i(), GpsState::ecef_pos, GpsState::ecef_vel, foo, gps_nmea, ltp_def_from_ecef_i(), GpsNmea::msg_buf, GpsState::ned_vel, nmea_read_until(), GpsNmea::state, NedCoor_i::x, and NedCoor_i::y.
Referenced by nmea_parse_prop_msg().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 90 of file gps_furuno.c.
References furuno_cfg_cnt.
Definition at line 96 of file gps_furuno.c.
References foo, gps_nmea, GpsNmea::msg_buf, GpsNmea::msg_len, and nmea_parse_perdcrv().
Here is the call graph for this function:
|
static |
Definition at line 56 of file gps_furuno.c.
Referenced by nmea_configure(), and nmea_parse_prop_init().
|
static |
Definition at line 35 of file gps_furuno.c.
Referenced by nmea_configure().