|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
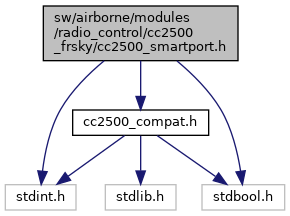
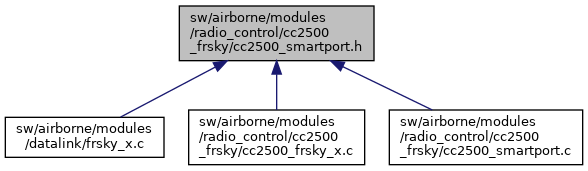
 Include dependency graph for cc2500_smartport.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cc2500_smartport.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | smartPortPayload_s |
Typedefs | |
| typedef bool | smartPortDownlinkFn(uint32_t *data) |
| typedef void | smartPortUplinkFn(struct smartPortPayload_s *payload) |
| typedef struct smartPortPayload_s | smartPortPayload_t |
| typedef void | smartPortWriteFrameFn(const smartPortPayload_t *payload) |
| typedef bool | smartPortCheckQueueEmptyFn(void) |
Enumerations | |
| enum | { FSSP_START_STOP = 0x7E , FSSP_DLE = 0x7D , FSSP_DLE_XOR = 0x20 , FSSP_DATA_FRAME = 0x10 , FSSP_MSPC_FRAME_SMARTPORT = 0x30 , FSSP_MSPC_FRAME_FPORT = 0x31 , FSSP_MSPS_FRAME = 0x32 , FSSP_SENSOR_ID1 = 0x1B , FSSP_SENSOR_ID2 = 0x0D , FSSP_SENSOR_ID3 = 0x34 , FSSP_SENSOR_ID4 = 0x67 } |
Variables | |
| smartPortDownlinkFn * | smartPortDownlink |
| smartPortUplinkFn * | smartPortUplink |
| struct smartPortPayload_s |
Definition at line 76 of file cc2500_smartport.h.
| Data Fields | ||
|---|---|---|
| uint32_t | data | |
| uint8_t | frameId | |
| uint16_t | valueId | |
Definition at line 83 of file cc2500_smartport.h.
Definition at line 8 of file cc2500_smartport.h.
| typedef void smartPortUplinkFn(struct smartPortPayload_s *payload) |
Definition at line 15 of file cc2500_smartport.h.
| typedef void smartPortWriteFrameFn(const smartPortPayload_t *payload) |
Definition at line 82 of file cc2500_smartport.h.
| Enumerator | |
|---|---|
| FSSP_START_STOP | |
| FSSP_DLE | |
| FSSP_DLE_XOR | |
| FSSP_DATA_FRAME | |
| FSSP_MSPC_FRAME_SMARTPORT | |
| FSSP_MSPC_FRAME_FPORT | |
| FSSP_MSPS_FRAME | |
| FSSP_SENSOR_ID1 | |
| FSSP_SENSOR_ID2 | |
| FSSP_SENSOR_ID3 | |
| FSSP_SENSOR_ID4 | |
Definition at line 55 of file cc2500_smartport.h.
| bool initSmartPortTelemetryExternal | ( | smartPortWriteFrameFn * | smartPortWriteFrameExternal | ) |
Definition at line 480 of file cc2500_smartport.c.
References foo, initSmartPortSensors(), smartPortWriteFrame, TELEMETRY_STATE_INITIALIZED_EXTERNAL, TELEMETRY_STATE_UNINITIALIZED, and telemetryState.
Referenced by frSkyXInit().
Here is the call graph for this function: Here is the caller graph for this function:| void processSmartPortTelemetry | ( | smartPortPayload_t * | payload, |
| volatile bool * | hasRequest, | ||
| const uint32_t * | requestTimeout | ||
| ) |
Definition at line 533 of file cc2500_smartport.c.
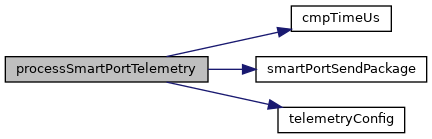
References ARMING_FLAG, attitude, cmpTimeUs(), currentControlRateProfile, currentPidProfile, pidGains_s::D, FD_PITCH, FD_ROLL, FD_YAW, featureIsEnabled, FLIGHT_MODE, foo, frSkyDataIdTableInfo, FSSP_DATAID_A4, FSSP_DATAID_ALTITUDE, FSSP_DATAID_CURRENT, FSSP_DATAID_CURRENT1, FSSP_DATAID_CURRENT2, FSSP_DATAID_CURRENT3, FSSP_DATAID_CURRENT4, FSSP_DATAID_CURRENT5, FSSP_DATAID_CURRENT6, FSSP_DATAID_CURRENT7, FSSP_DATAID_CURRENT8, FSSP_DATAID_DOWNLINK, FSSP_DATAID_FUEL, FSSP_DATAID_GPS_ALT, FSSP_DATAID_HEADING, FSSP_DATAID_HOME_DIST, FSSP_DATAID_LATLONG, FSSP_DATAID_RPM, FSSP_DATAID_RPM1, FSSP_DATAID_RPM2, FSSP_DATAID_RPM3, FSSP_DATAID_RPM4, FSSP_DATAID_RPM5, FSSP_DATAID_RPM6, FSSP_DATAID_RPM7, FSSP_DATAID_RPM8, FSSP_DATAID_SPEED, FSSP_DATAID_T1, FSSP_DATAID_T11, FSSP_DATAID_T2, FSSP_DATAID_TEMP, FSSP_DATAID_TEMP1, FSSP_DATAID_TEMP2, FSSP_DATAID_TEMP3, FSSP_DATAID_TEMP4, FSSP_DATAID_TEMP5, FSSP_DATAID_TEMP6, FSSP_DATAID_TEMP7, FSSP_DATAID_TEMP8, FSSP_DATAID_UPLINK, FSSP_DATAID_VARIO, FSSP_DATAID_VFAS, FSSP_DATAID_VFAS1, FSSP_DATAID_VFAS2, FSSP_DATAID_VFAS3, FSSP_DATAID_VFAS4, FSSP_DATAID_VFAS5, FSSP_DATAID_VFAS6, FSSP_DATAID_VFAS7, FSSP_DATAID_VFAS8, getAmperage, getBatteryCellCount, getBatteryVoltage, getEstimatedAltitudeCm, getEstimatedVario, getMAhDrawn, pidGains_s::I, frSkyTableInfo_s::index, isArmingDisabled, micros, pidGains_s::P, pidProfile_s::pid, PID_PITCH, PID_ROLL, PID_YAW, controlRateConfig_t::rates, sensors, smartPortDownlink, smartPortSendPackage(), smartPortUplink, telemetryConfig(), UNUSED, and smartPortPayload_s::valueId.
Referenced by frSkyXProcessFrame().
Here is the call graph for this function: Here is the caller graph for this function:| smartPortPayload_t * smartPortDataReceive | ( | uint16_t | c, |
| bool * | clearToSend, | ||
| smartPortCheckQueueEmptyFn * | checkQueueEmpty, | ||
| bool | withChecksum | ||
| ) |
Definition at line 238 of file cc2500_smartport.c.
References checksum, foo, FSSP_DLE, FSSP_DLE_XOR, FSSP_SENSOR_ID1, FSSP_SENSOR_ID2, and FSSP_START_STOP.
Referenced by frSkyXProcessFrame().
Here is the caller graph for this function:
|
extern |
Definition at line 22 of file cc2500_smartport.c.
Referenced by datalink_frsky_x_init(), and processSmartPortTelemetry().
|
extern |
Definition at line 23 of file cc2500_smartport.c.
Referenced by datalink_frsky_x_init(), and processSmartPortTelemetry().