|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
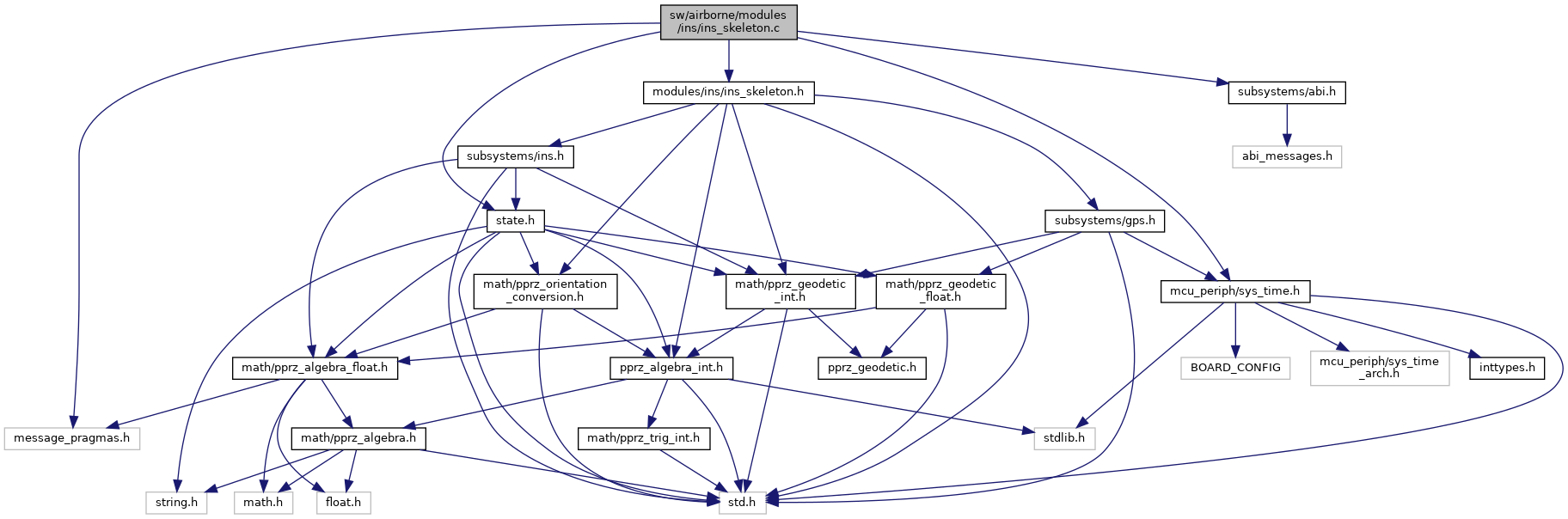
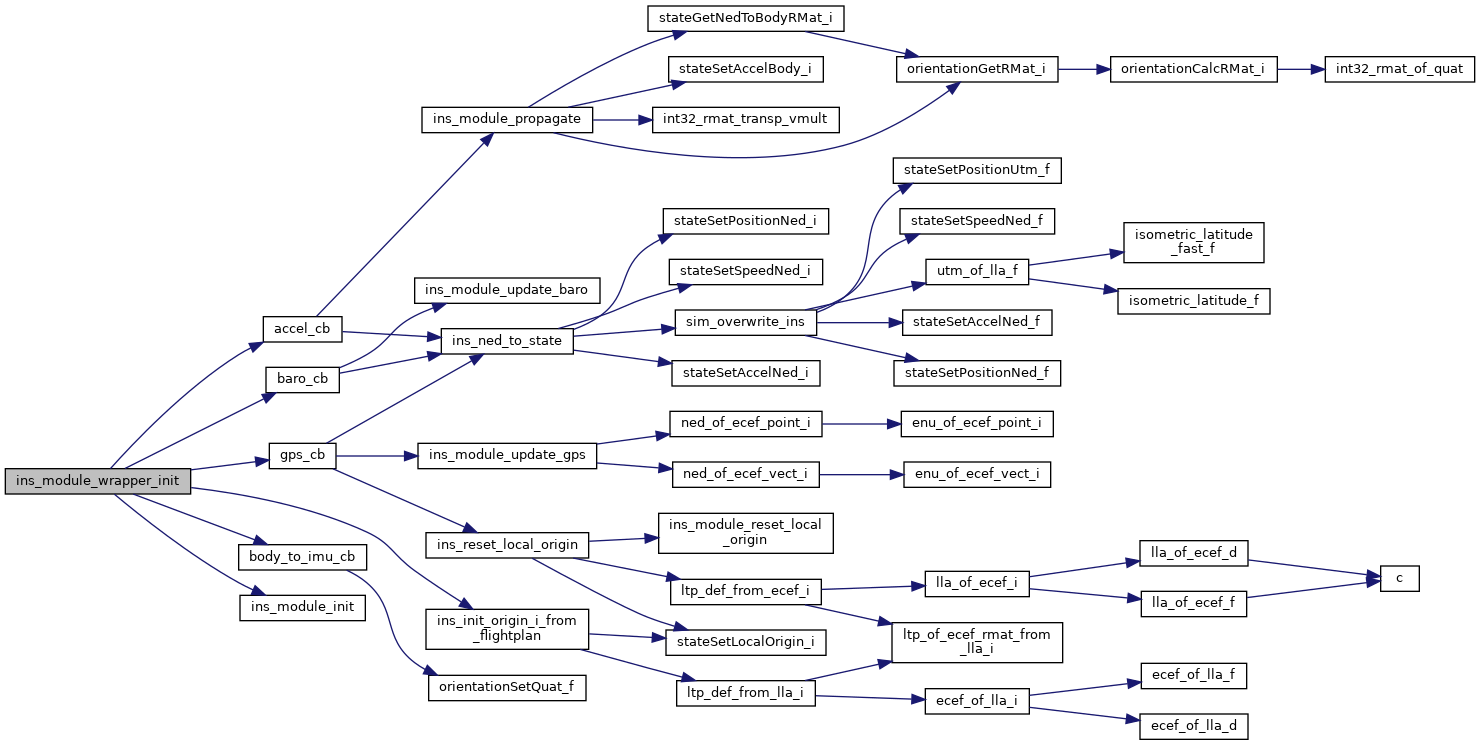
#include "modules/ins/ins_skeleton.h"#include "subsystems/abi.h"#include "mcu_periph/sys_time.h"#include "message_pragmas.h"#include "state.h" Include dependency graph for ins_skeleton.c:
Include dependency graph for ins_skeleton.c:Go to the source code of this file.
Macros | |
| #define | USE_INS_NAV_INIT TRUE |
| #define | INS_MODULE_BARO_ID ABI_BROADCAST |
| baro More... | |
| #define | INS_MODULE_IMU_ID ABI_BROADCAST |
| IMU (accel, body_to_imu) More... | |
| #define | INS_MODULE_GPS_ID GPS_MULTI_ID |
| ABI binding for gps data. More... | |
Functions | |
| void | ins_module_wrapper_init (void) |
| static void | ins_ned_to_state (void) |
| copy position and speed to state interface More... | |
| static void | baro_cb (uint8_t sender_id, uint32_t stamp, float pressure) |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| static void | body_to_imu_cb (uint8_t sender_id, struct FloatQuat *q_b2i_f) |
| void WEAK | ins_module_init (void) |
| void WEAK | ins_module_update_baro (float pressure) |
| void WEAK | ins_module_update_gps (struct GpsState *gps_s, float dt) |
| void WEAK | ins_module_propagate (struct Int32Vect3 *accel, float dt) |
| void WEAK | ins_module_reset_local_origin (void) |
| void | ins_reset_local_origin (void) |
| INS local origin reset. More... | |
Variables | |
| static abi_event | baro_ev |
| static abi_event | accel_ev |
| static abi_event | gps_ev |
| static abi_event | body_to_imu_ev |
| struct InsModuleInt | ins_module |
| global INS state More... | |
Paparazzi specific wrapper to run simple module based INS.
Definition in file ins_skeleton.c.
| #define INS_MODULE_BARO_ID ABI_BROADCAST |
baro
Definition at line 47 of file ins_skeleton.c.
| #define INS_MODULE_GPS_ID GPS_MULTI_ID |
| #define INS_MODULE_IMU_ID ABI_BROADCAST |
IMU (accel, body_to_imu)
Definition at line 54 of file ins_skeleton.c.
| #define USE_INS_NAV_INIT TRUE |
Definition at line 35 of file ins_skeleton.c.
|
static |
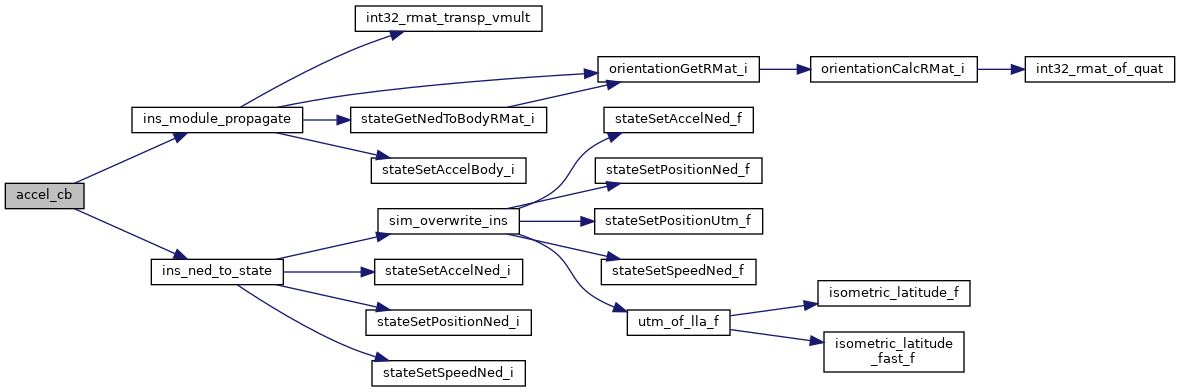
Definition at line 100 of file ins_skeleton.c.
References ins_module_propagate(), and ins_ned_to_state().
Referenced by ins_module_wrapper_init().
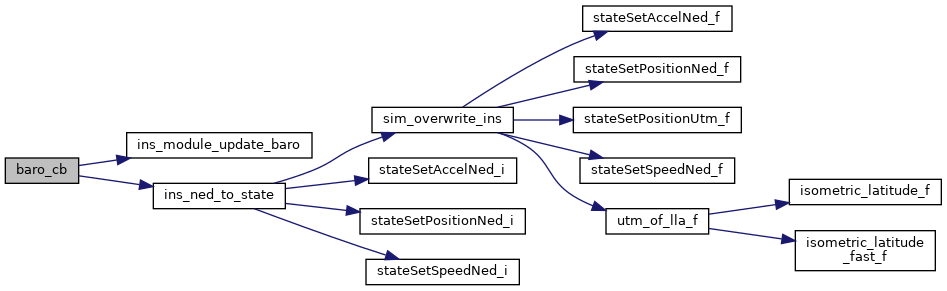
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 93 of file ins_skeleton.c.
References ins_module_update_baro(), and ins_ned_to_state().
Referenced by ins_module_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 140 of file ins_skeleton.c.
References InsModuleInt::body_to_imu, ins_module, and orientationSetQuat_f().
Referenced by ins_module_wrapper_init().
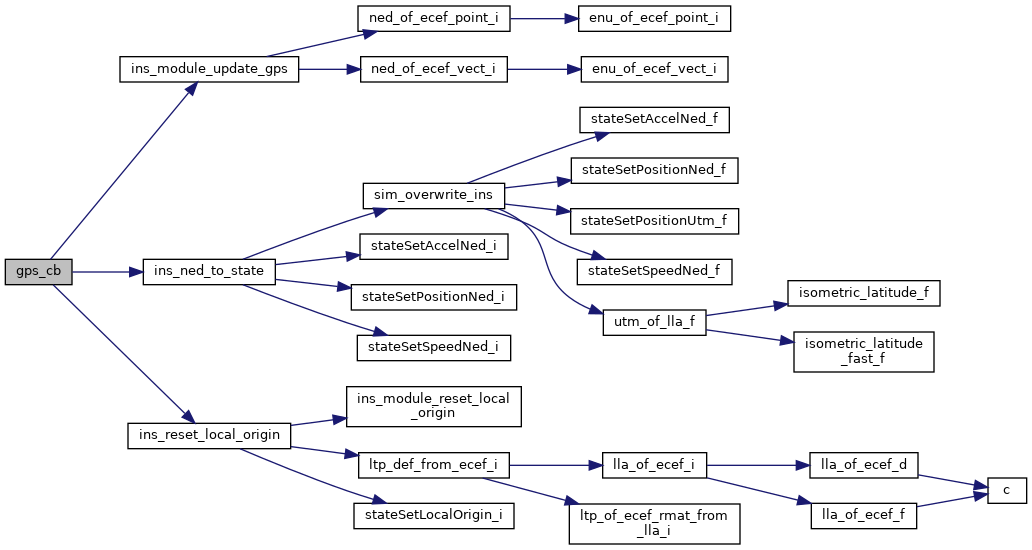
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 115 of file ins_skeleton.c.
References GpsState::fix, InsModuleInt::gps, GPS_FIX_3D, ins_module, ins_module_update_gps(), ins_ned_to_state(), ins_reset_local_origin(), and InsModuleInt::ltp_initialized.
Referenced by ins_module_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:| void WEAK ins_module_init | ( | void | ) |
Definition at line 149 of file ins_skeleton.c.
Referenced by ins_module_wrapper_init().
Here is the caller graph for this function:| void WEAK ins_module_propagate | ( | struct Int32Vect3 * | accel, |
| float | dt | ||
| ) |
Definition at line 185 of file ins_skeleton.c.
References InsModuleInt::body_to_imu, ins_module, int32_rmat_transp_vmult(), InsModuleInt::ltp_accel, orientationGetRMat_i(), stateGetNedToBodyRMat_i(), stateSetAccelBody_i(), and VECT3_COPY.
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void WEAK ins_module_reset_local_origin | ( | void | ) |
Definition at line 198 of file ins_skeleton.c.
Referenced by ins_reset_local_origin().
Here is the caller graph for this function:| void WEAK ins_module_update_baro | ( | float | pressure | ) |
Definition at line 153 of file ins_skeleton.c.
Referenced by baro_cb().
Here is the caller graph for this function:| void WEAK ins_module_update_gps | ( | struct GpsState * | gps_s, |
| float | dt | ||
| ) |
Definition at line 157 of file ins_skeleton.c.
References GpsState::ecef_pos, GpsState::ecef_vel, GPS_VALID_POS_ECEF_BIT, GPS_VALID_VEL_ECEF_BIT, GPS_VALID_VEL_NED_BIT, ins_module, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, INT32_SPEED_OF_CM_S_DEN, INT32_SPEED_OF_CM_S_NUM, INT32_VECT3_SCALE_2, InsModuleInt::ltp_def, InsModuleInt::ltp_pos, InsModuleInt::ltp_speed, ned_of_ecef_point_i(), ned_of_ecef_vect_i(), GpsState::ned_vel, and GpsState::valid_fields.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_module_wrapper_init | ( | void | ) |
Definition at line 223 of file ins_skeleton.c.
References accel_cb(), accel_ev, baro_cb(), baro_ev, body_to_imu_cb(), body_to_imu_ev, gps_cb(), gps_ev, ins_init_origin_i_from_flightplan(), ins_module, INS_MODULE_BARO_ID, INS_MODULE_GPS_ID, INS_MODULE_IMU_ID, ins_module_init(), INT32_VECT3_ZERO, InsModuleInt::ltp_accel, InsModuleInt::ltp_def, InsModuleInt::ltp_initialized, InsModuleInt::ltp_pos, and InsModuleInt::ltp_speed.
Here is the call graph for this function:
|
static |
copy position and speed to state interface
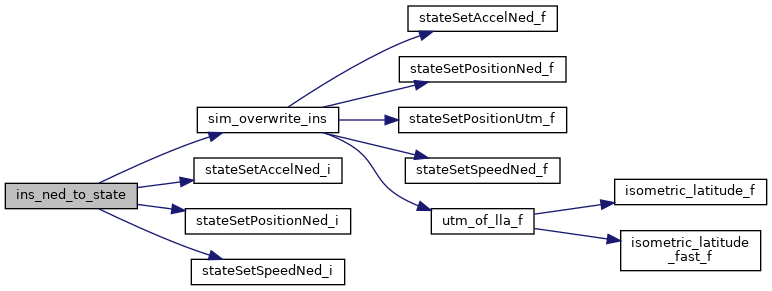
Definition at line 76 of file ins_skeleton.c.
References ins_module, InsModuleInt::ltp_accel, InsModuleInt::ltp_pos, InsModuleInt::ltp_speed, nps_bypass_ins, sim_overwrite_ins(), stateSetAccelNed_i(), stateSetPositionNed_i(), and stateSetSpeedNed_i().
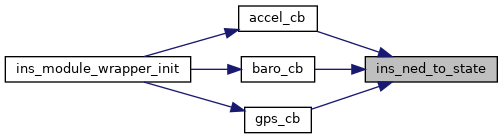
Referenced by accel_cb(), baro_cb(), and gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_local_origin | ( | void | ) |
INS local origin reset.
Reset horizontal and vertical reference to the current position. Does nothing if not implemented by specific INS algorithm.
INS local origin reset.
Definition at line 207 of file ins_skeleton.c.
References LlaCoor_i::alt, GpsState::ecef_pos, GpsState::fix, InsModuleInt::gps, GPS_FIX_3D, GpsState::hmsl, LtpDef_i::hmsl, ins_module, ins_module_reset_local_origin(), LtpDef_i::lla, GpsState::lla_pos, InsModuleInt::ltp_def, ltp_def_from_ecef_i(), InsModuleInt::ltp_initialized, and stateSetLocalOrigin_i().
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 67 of file ins_skeleton.c.
Referenced by ins_module_wrapper_init().
|
static |
Definition at line 66 of file ins_skeleton.c.
Referenced by ins_module_wrapper_init().
|
static |
Definition at line 69 of file ins_skeleton.c.
Referenced by ins_module_wrapper_init().
|
static |
Definition at line 68 of file ins_skeleton.c.
Referenced by ins_module_wrapper_init().
| struct InsModuleInt ins_module |
global INS state
Definition at line 71 of file ins_skeleton.c.
Referenced by body_to_imu_cb(), gps_cb(), ins_module_propagate(), ins_module_update_gps(), ins_module_wrapper_init(), ins_ned_to_state(), and ins_reset_local_origin().
 1.8.17
1.8.17