|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
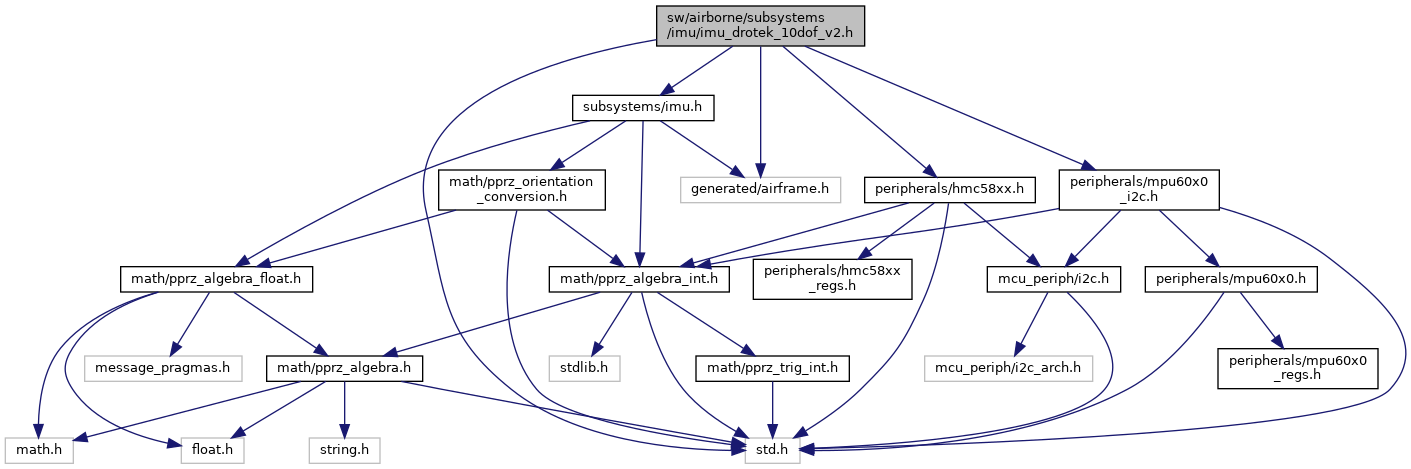
#include "std.h"#include "generated/airframe.h"#include "subsystems/imu.h"#include "peripherals/mpu60x0_i2c.h"#include "peripherals/hmc58xx.h" Include dependency graph for imu_drotek_10dof_v2.h:
Include dependency graph for imu_drotek_10dof_v2.h:Go to the source code of this file.
Data Structures | |
| struct | ImuDrotek2 |
Functions | |
| void | imu_drotek2_init (void) |
| void | imu_drotek2_periodic (void) |
| void | imu_drotek2_event (void) |
| bool | imu_drotek2_configure_mag_slave (Mpu60x0ConfigSet mpu_set, void *mpu) |
| callback function to configure hmc5883 mag More... | |
Variables | |
| struct ImuDrotek2 | imu_drotek2 |
Driver for the Drotek 10DOF V2 IMU. MPU6050 + HMC5883 + MS5611
Definition in file imu_drotek_10dof_v2.h.
| struct ImuDrotek2 |
Definition at line 75 of file imu_drotek_10dof_v2.h.
Collaboration diagram for ImuDrotek2:| Data Fields | ||
|---|---|---|
| struct Hmc58xx | hmc | |
| struct Mpu60x0_I2c | mpu | |
| #define DROTEK_2_ACCEL_RANGE MPU60X0_ACCEL_RANGE_8G |
Definition at line 44 of file imu_drotek_10dof_v2.h.
| #define DROTEK_2_GYRO_RANGE MPU60X0_GYRO_RANGE_1000 |
Definition at line 40 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_X_SENS MPU60X0_ACCEL_SENS[DROTEK_2_ACCEL_RANGE] |
Definition at line 62 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_X_SENS_DEN MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][1] |
Definition at line 64 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_X_SENS_NUM MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][0] |
Definition at line 63 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Y_SENS MPU60X0_ACCEL_SENS[DROTEK_2_ACCEL_RANGE] |
Definition at line 65 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Y_SENS_DEN MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][1] |
Definition at line 67 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Y_SENS_NUM MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][0] |
Definition at line 66 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Z_SENS MPU60X0_ACCEL_SENS[DROTEK_2_ACCEL_RANGE] |
Definition at line 68 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Z_SENS_DEN MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][1] |
Definition at line 70 of file imu_drotek_10dof_v2.h.
| #define IMU_ACCEL_Z_SENS_NUM MPU60X0_ACCEL_SENS_FRAC[DROTEK_2_ACCEL_RANGE][0] |
Definition at line 69 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_P_SENS MPU60X0_GYRO_SENS[DROTEK_2_GYRO_RANGE] |
Definition at line 49 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_P_SENS_DEN MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][1] |
Definition at line 51 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_P_SENS_NUM MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][0] |
Definition at line 50 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_Q_SENS MPU60X0_GYRO_SENS[DROTEK_2_GYRO_RANGE] |
Definition at line 52 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_Q_SENS_DEN MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][1] |
Definition at line 54 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_Q_SENS_NUM MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][0] |
Definition at line 53 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_R_SENS MPU60X0_GYRO_SENS[DROTEK_2_GYRO_RANGE] |
Definition at line 55 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_R_SENS_DEN MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][1] |
Definition at line 57 of file imu_drotek_10dof_v2.h.
| #define IMU_GYRO_R_SENS_NUM MPU60X0_GYRO_SENS_FRAC[DROTEK_2_GYRO_RANGE][0] |
Definition at line 56 of file imu_drotek_10dof_v2.h.
| bool imu_drotek2_configure_mag_slave | ( | Mpu60x0ConfigSet | mpu_set, |
| void * | mpu | ||
| ) |
callback function to configure hmc5883 mag
Definition at line 158 of file imu_drotek_10dof_v2.c.
References ImuDrotek2::hmc, hmc58xx_start_configure(), imu_drotek2, and Hmc58xx::initialized.
Referenced by imu_drotek2_init().
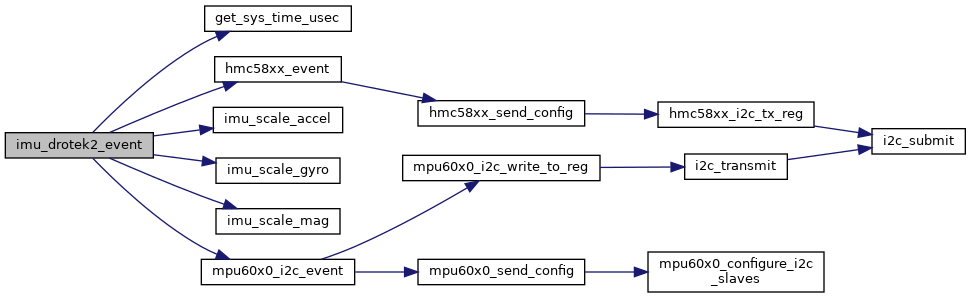
Here is the call graph for this function: Here is the caller graph for this function:| void imu_drotek2_event | ( | void | ) |
Definition at line 110 of file imu_drotek_10dof_v2.c.
References Imu::accel, Imu::accel_unscaled, Hmc58xx::data, Mpu60x0_I2c::data_accel, Mpu60x0_I2c::data_available, Hmc58xx::data_available, Mpu60x0_I2c::data_rates, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, ImuDrotek2::hmc, hmc58xx_event(), imu, imu_drotek2, IMU_DROTEK_ID, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), Imu::mag, Imu::mag_unscaled, ImuDrotek2::mpu, mpu60x0_i2c_event(), Int32Rates::p, Int32Rates::q, Int32Rates::r, RATES_COPY, VECT3_COPY, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Here is the call graph for this function:| void imu_drotek2_init | ( | void | ) |
Definition at line 75 of file imu_drotek_10dof_v2.c.
References Mpu60x0Config::accel_range, Mpu60x0_I2c::config, Mpu60x0I2cSlave::configure, Mpu60x0Config::dlpf_cfg, DROTEK_2_ACCEL_RANGE, DROTEK_2_GYRO_RANGE, DROTEK_2_HMC_I2C_ADDR, DROTEK_2_MPU_I2C_ADDR, Mpu60x0Config::gyro_range, ImuDrotek2::hmc, hmc58xx_init(), Mpu60x0Config::i2c_bypass, imu_drotek2, imu_drotek2_configure_mag_slave(), ImuDrotek2::mpu, mpu60x0_i2c_init(), Mpu60x0Config::nb_slaves, Mpu60x0Config::slaves, and Mpu60x0Config::smplrt_div.
Here is the call graph for this function:| void imu_drotek2_periodic | ( | void | ) |
Definition at line 99 of file imu_drotek_10dof_v2.c.
References Mpu60x0_I2c::config, ImuDrotek2::hmc, hmc58xx_read(), imu_drotek2, Mpu60x0Config::initialized, ImuDrotek2::mpu, and mpu60x0_i2c_periodic().
Here is the call graph for this function:| struct ImuDrotek2 imu_drotek2 |
Definition at line 73 of file imu_drotek_10dof_v2.c.
Referenced by imu_drotek2_configure_mag_slave(), imu_drotek2_event(), imu_drotek2_init(), and imu_drotek2_periodic().
 1.8.17
1.8.17