|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
example empty controller More...
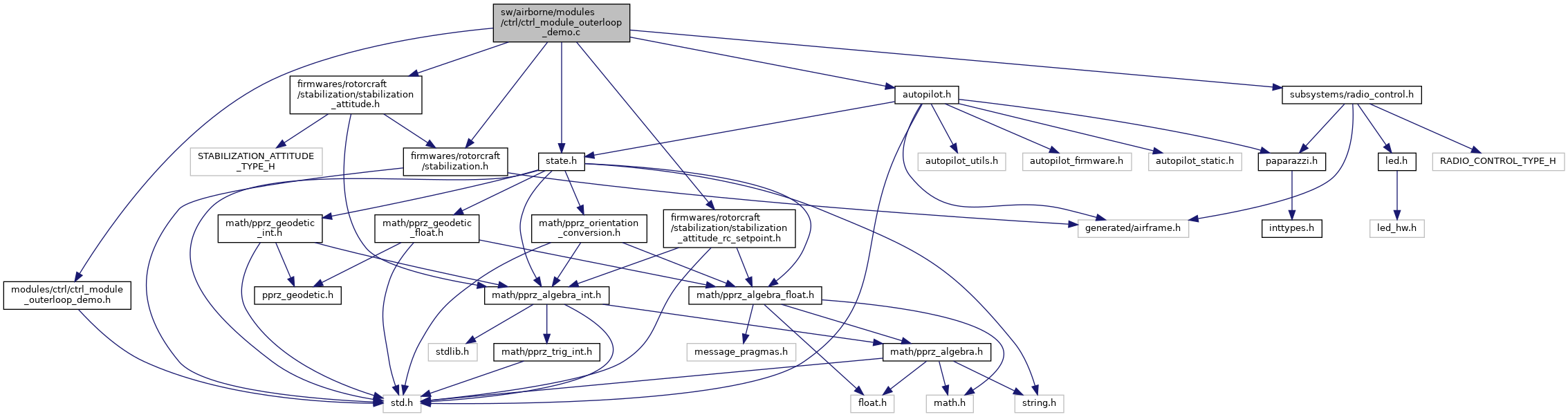
#include "modules/ctrl/ctrl_module_outerloop_demo.h"#include "state.h"#include "subsystems/radio_control.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "autopilot.h" Include dependency graph for ctrl_module_outerloop_demo.c:
Include dependency graph for ctrl_module_outerloop_demo.c:Go to the source code of this file.
Data Structures | |
| struct | ctrl_module_demo_struct |
Functions | |
| void | guidance_h_module_init (void) |
| void | guidance_h_module_enter (void) |
| void | guidance_h_module_read_rc (void) |
| void | guidance_h_module_run (bool in_flight) |
Variables | |
| struct ctrl_module_demo_struct | ctrl |
| float | comode_time = 0 |
example empty controller
Implements an example simple horizontal outerloop controller in a module.
Definition in file ctrl_module_outerloop_demo.c.
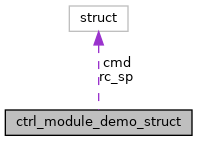
| struct ctrl_module_demo_struct |
Definition at line 32 of file ctrl_module_innerloop_demo.c.
Collaboration diagram for ctrl_module_demo_struct:| Data Fields | ||
|---|---|---|
| struct Int32Eulers | cmd | |
| struct Int32Eulers | rc_sp | |
| int | rc_t | |
| int | rc_x | |
| int | rc_y | |
| int | rc_z | |
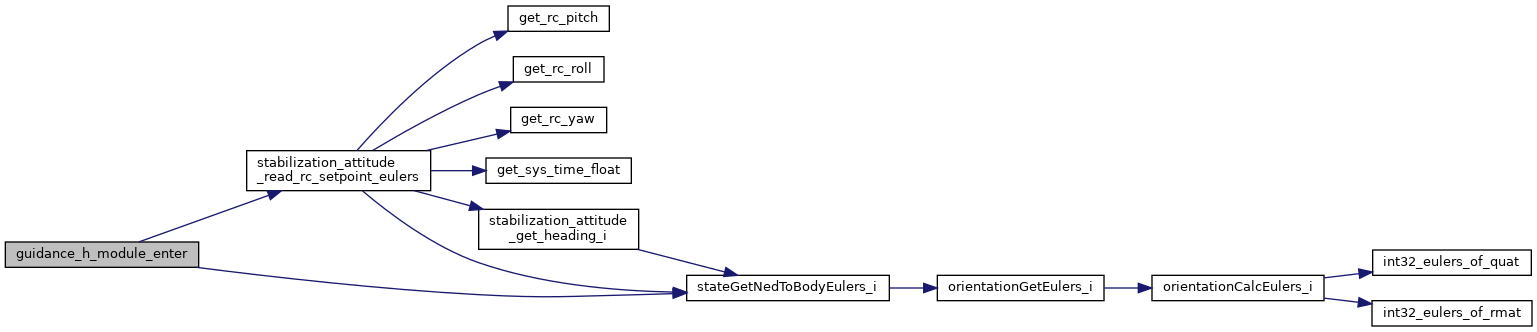
| void guidance_h_module_enter | ( | void | ) |
Definition at line 58 of file ctrl_module_outerloop_demo.c.
References autopilot, ctrl_module_demo_struct::cmd, ctrl, pprz_autopilot::in_flight, Int32Eulers::psi, ctrl_module_demo_struct::rc_sp, stabilization_attitude_read_rc_setpoint_eulers(), and stateGetNedToBodyEulers_i().
Here is the call graph for this function:| void guidance_h_module_init | ( | void | ) |
Definition at line 54 of file ctrl_module_outerloop_demo.c.
| void guidance_h_module_read_rc | ( | void | ) |
Definition at line 67 of file ctrl_module_outerloop_demo.c.
References autopilot, ctrl, pprz_autopilot::in_flight, ctrl_module_demo_struct::rc_sp, and stabilization_attitude_read_rc_setpoint_eulers().
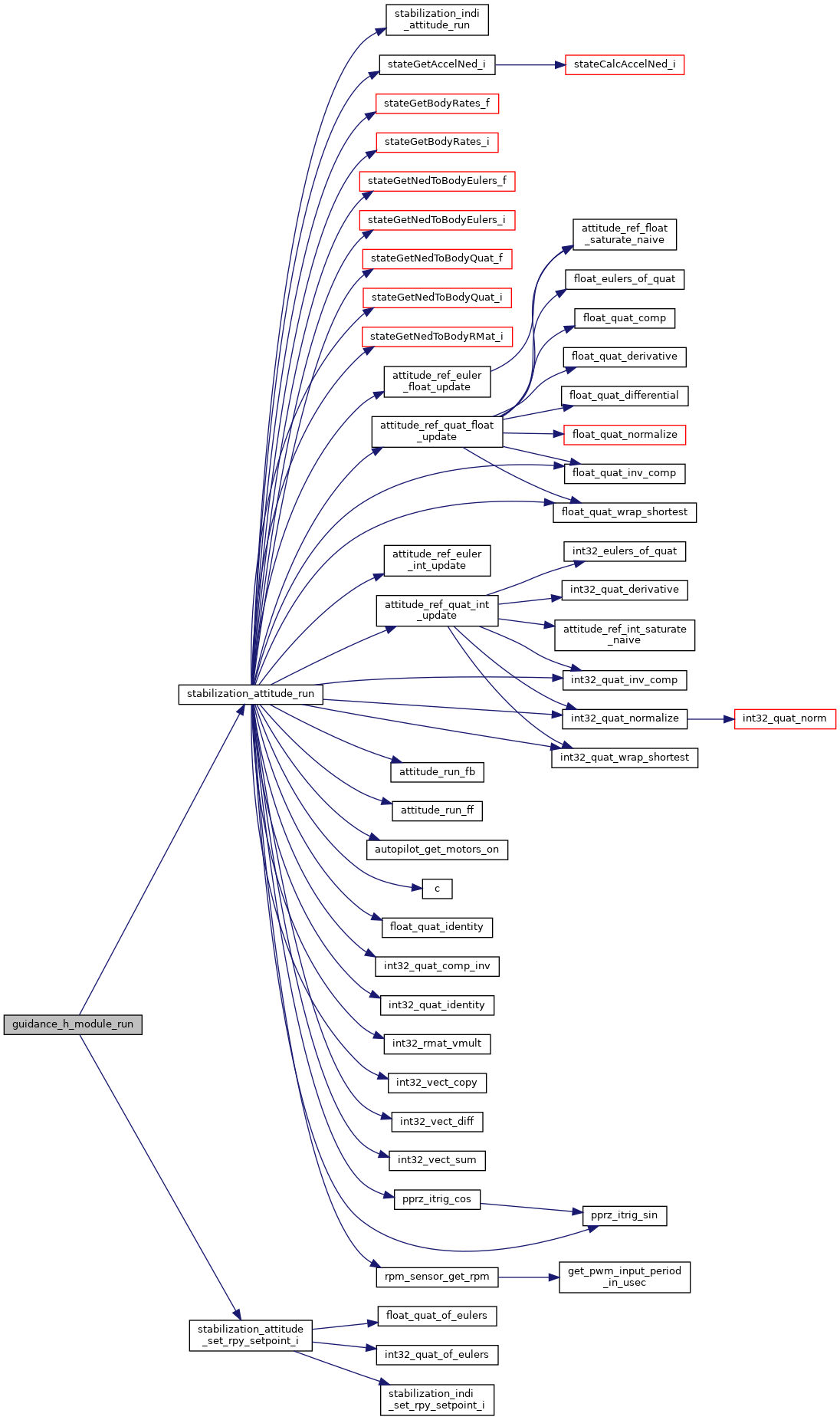
Here is the call graph for this function:| void guidance_h_module_run | ( | bool | in_flight | ) |
Definition at line 73 of file ctrl_module_outerloop_demo.c.
References ANGLE_BFP_OF_REAL, ctrl_module_demo_struct::cmd, ctrl, Int32Eulers::phi, stabilization_attitude_run(), stabilization_attitude_set_rpy_setpoint_i(), and Int32Eulers::theta.
Here is the call graph for this function:| float comode_time = 0 |
Definition at line 48 of file ctrl_module_outerloop_demo.c.
| struct ctrl_module_demo_struct ctrl |
Referenced by guidance_h_module_enter(), guidance_h_module_read_rc(), and guidance_h_module_run().
 1.8.17
1.8.17