|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
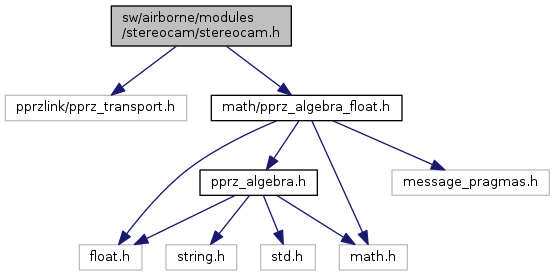
interface to the TU Delft serial stereocam More...
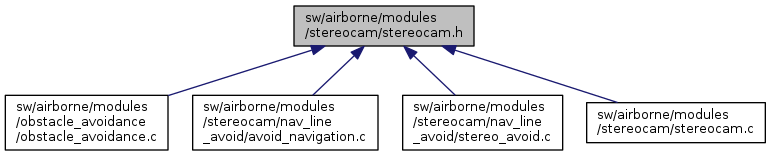
 Include dependency graph for stereocam.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stereocam.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | stereocam_t |
Functions | |
| void | stereocam_init (void) |
| void | stereocam_event (void) |
| void | state2stereocam (void) |
interface to the TU Delft serial stereocam
Definition in file stereocam.h.
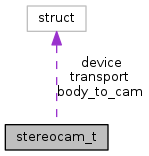
| struct stereocam_t |
Definition at line 34 of file stereocam.h.
Collaboration diagram for stereocam_t:| Data Fields | ||
|---|---|---|
| struct FloatRMat | body_to_cam | IMU to stereocam rotation. |
| struct link_device * | device | The device which is uses for communication. |
| bool | msg_available | If we received a message. |
| struct pprz_transport | transport | The transport layer (PPRZ) |
| void state2stereocam | ( | void | ) |
Definition at line 216 of file stereocam.c.
References stereocam_t::body_to_cam, stereocam_t::device, float_rmat_mult(), FloatEulers::phi, FloatEulers::psi, stateGetNedToBodyEulers_f(), FloatEulers::theta, and stereocam_t::transport.
Here is the call graph for this function:| void stereocam_event | ( | void | ) |
Definition at line 202 of file stereocam.c.
References stereocam_t::device, stereocam_t::msg_available, stereocam_msg_buf, stereocam_parse_msg(), and stereocam_t::transport.
Here is the call graph for this function:| void stereocam_init | ( | void | ) |
Definition at line 95 of file stereocam.c.
References stereocam_t::body_to_cam, float_rmat_of_eulers, InitMedianFilterVect3Float, MEDIAN_DEFAULT_SIZE, medianfilter, STEREO_BODY_TO_STEREO_PHI, STEREO_BODY_TO_STEREO_PSI, STEREO_BODY_TO_STEREO_THETA, and stereocam_t::transport.
 1.8.8
1.8.8