|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
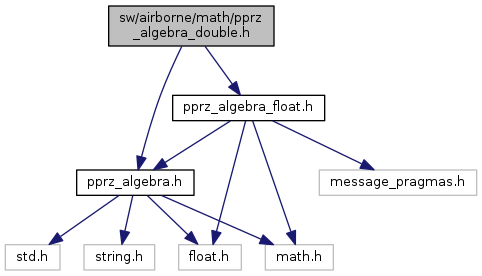
Paparazzi double precision floating point algebra. More...
 Include dependency graph for pprz_algebra_double.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for pprz_algebra_double.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | DoubleVect2 |
| struct | DoubleVect3 |
| struct | DoubleQuat |
| Roation quaternion. More... | |
| struct | DoubleMat33 |
| struct | DoubleRMat |
| rotation matrix More... | |
| struct | DoubleEulers |
| euler angles More... | |
| struct | DoubleRates |
| angular rates More... | |
Macros | |
| #define | DOUBLE_VECT3_ROUND(_v) DOUBLE_VECT3_RINT(_v, _v) |
| #define | DOUBLE_VECT3_RINT(_vout, _vin) |
| #define | DOUBLE_RMAT_OF_EULERS(_rm, _e) WARNING("DOUBLE_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") double_rmat_of_eulers(&(_rm), &(_e)) |
| #define | DOUBLE_RMAT_OF_EULERS_321(_rm, _e) WARNING("DOUBLE_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") double_rmat_of_eulers(&(_rm), &(_e)) |
| #define | DOUBLE_QUAT_OF_EULERS(_q, _e) WARNING("DOUBLE_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") double_quat_of_eulers(&(_q), &(_e)) |
| #define | DOUBLE_EULERS_OF_QUAT(_e, _q) WARNING("DOUBLE_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") double_eulers_of_quat(&(_e), &(_q)) |
| #define | DOUBLE_QUAT_VMULT(v_out, q, v_in) WARNING("DOUBLE_QUAT_VMULT macro is deprecated, use the lower case function instead") double_quat_vmult(&(v_out), &(q), &(v_in)) |
Functions | |
| static double | double_vect3_norm (struct DoubleVect3 *v) |
| static void | double_vect3_normalize (struct DoubleVect3 *v) |
| normalize 3D vector in place More... | |
| static void | double_quat_identity (struct DoubleQuat *q) |
| initialises a quaternion to identity More... | |
| static double | double_quat_norm (struct DoubleQuat *q) |
| static void | double_quat_normalize (struct DoubleQuat *q) |
| void | double_rmat_of_eulers_321 (struct DoubleRMat *rm, struct DoubleEulers *e) |
| Rotation matrix from 321 Euler angles (double). More... | |
| void | double_quat_of_eulers (struct DoubleQuat *q, struct DoubleEulers *e) |
| void | double_eulers_of_quat (struct DoubleEulers *e, struct DoubleQuat *q) |
| void | double_quat_vmult (struct DoubleVect3 *v_out, struct DoubleQuat *q, struct DoubleVect3 *v_in) |
| static void | double_rmat_identity (struct DoubleRMat *rm) |
| initialises a rotation matrix to identity More... | |
| void | double_rmat_inv (struct DoubleRMat *m_b2a, struct DoubleRMat *m_a2b) |
| Inverse/transpose of a rotation matrix. More... | |
| void | double_rmat_comp (struct DoubleRMat *m_a2c, struct DoubleRMat *m_a2b, struct DoubleRMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. More... | |
| void | double_rmat_vmult (struct DoubleVect3 *vb, struct DoubleRMat *m_a2b, struct DoubleVect3 *va) |
| rotate 3D vector by rotation matrix. More... | |
| void | double_rmat_transp_vmult (struct DoubleVect3 *vb, struct DoubleRMat *m_b2a, struct DoubleVect3 *va) |
| rotate 3D vector by transposed rotation matrix. More... | |
| void | double_rmat_of_quat (struct DoubleRMat *rm, struct DoubleQuat *q) |
| static void | double_rmat_of_eulers (struct DoubleRMat *rm, struct DoubleEulers *e) |
Paparazzi double precision floating point algebra.
Definition in file pprz_algebra_double.h.
 1.8.8
1.8.8