|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Flight line from OSAM advanced navigation routines. More...
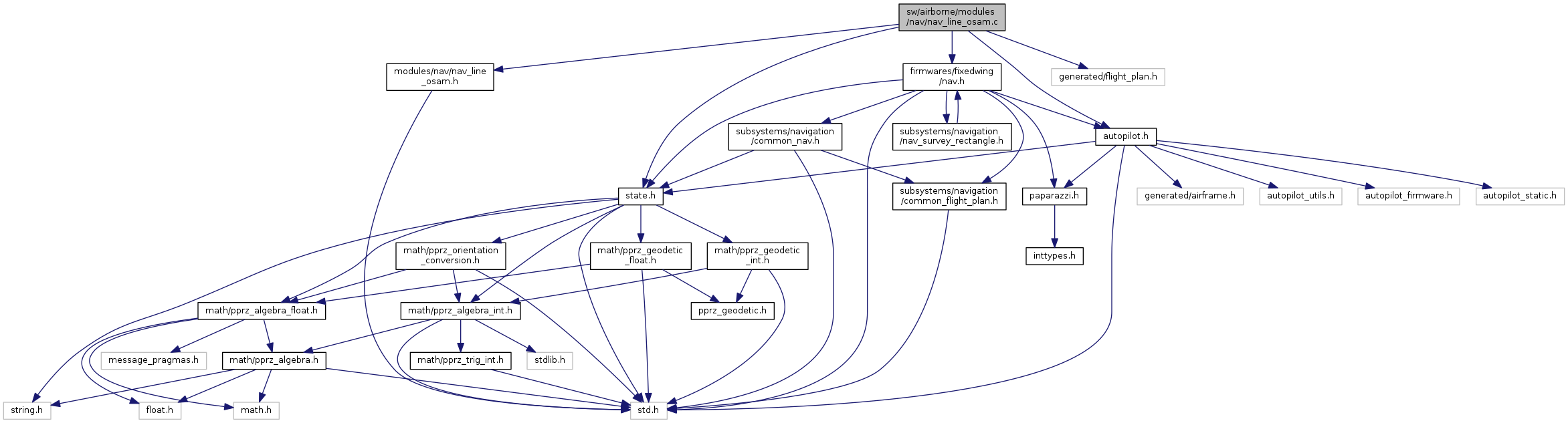
#include "modules/nav/nav_line_osam.h"#include "firmwares/fixedwing/nav.h"#include "state.h"#include "autopilot.h"#include "generated/flight_plan.h" Include dependency graph for nav_line_osam.c:
Include dependency graph for nav_line_osam.c:Go to the source code of this file.
Data Structures | |
| struct | Point2D |
Macros | |
| #define | LINE_START_FUNCTION {} |
| #define | LINE_STOP_FUNCTION {} |
Enumerations | |
| enum | FLStatus { FLInitialize, FLCircleS, FLLine, FLFinished } |
Functions | |
| static void | TranslateAndRotateFromWorld (struct Point2D *p, float Zrot, float transX, float transY) |
| bool | nav_line_osam_run (uint8_t From_WP, uint8_t To_WP, float radius, float Space_Before, float Space_After) |
| bool | nav_line_osam_block_run (uint8_t First_WP, uint8_t Last_WP, float radius, float Space_Before, float Space_After) |
Variables | |
| static enum FLStatus | CFLStatus = FLInitialize |
| static struct Point2D | FLCircle |
| static struct Point2D | FLFROMWP |
| static struct Point2D | FLTOWP |
| static float | FLQDR |
| static float | FLRadius |
| static uint8_t | FLBlockCount = 0 |
Flight line from OSAM advanced navigation routines.
Definition in file nav_line_osam.c.
| struct Point2D |
Definition at line 90 of file nav_launcher.c.
| Data Fields | ||
|---|---|---|
| float | x | |
| float | y | |
| #define LINE_START_FUNCTION {} |
Definition at line 38 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
| #define LINE_STOP_FUNCTION {} |
Definition at line 41 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
| enum FLStatus |
| Enumerator | |
|---|---|
| FLInitialize | |
| FLCircleS | |
| FLLine | |
| FLFinished | |
Definition at line 46 of file nav_line_osam.c.
| bool nav_line_osam_block_run | ( | uint8_t | First_WP, |
| uint8_t | Last_WP, | ||
| float | radius, | ||
| float | Space_Before, | ||
| float | Space_After | ||
| ) |
Definition at line 176 of file nav_line_osam.c.
References CFLStatus, FLBlockCount, FLInitialize, and nav_line_osam_run().
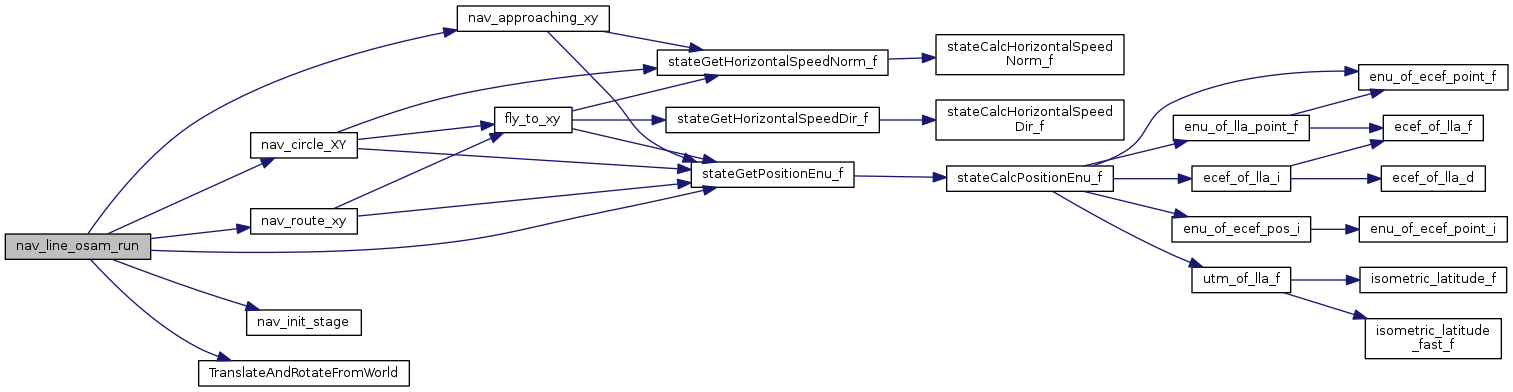
Here is the call graph for this function:| bool nav_line_osam_run | ( | uint8_t | From_WP, |
| uint8_t | To_WP, | ||
| float | radius, | ||
| float | Space_Before, | ||
| float | Space_After | ||
| ) |
Definition at line 71 of file nav_line_osam.c.
References CFLStatus, FLCircle, FLCircleS, FLFinished, FLFROMWP, FLInitialize, FLLine, FLQDR, FLRadius, FLTOWP, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_xy(), nav_circle_XY(), nav_init_stage(), nav_route_xy(), NavCircleCount, NavQdrCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, stateGetPositionEnu_f(), TranslateAndRotateFromWorld(), waypoints, WaypointX, WaypointY, EnuCoor_f::x, Point2D::x, EnuCoor_f::y, and Point2D::y.
Referenced by nav_line_osam_block_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 58 of file nav_line_osam.c.
References Point2D::x, and Point2D::y.
Referenced by nav_line_osam_run().
Here is the caller graph for this function:
|
static |
Definition at line 48 of file nav_line_osam.c.
Referenced by nav_line_osam_block_run(), and nav_line_osam_run().
|
static |
Definition at line 174 of file nav_line_osam.c.
Referenced by nav_line_osam_block_run().
|
static |
Definition at line 49 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
|
static |
Definition at line 50 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
|
static |
Definition at line 52 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
|
static |
Definition at line 53 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
|
static |
Definition at line 51 of file nav_line_osam.c.
Referenced by nav_line_osam_run().
 1.8.8
1.8.8