|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
XSENS to just provide IMU measurements. More...
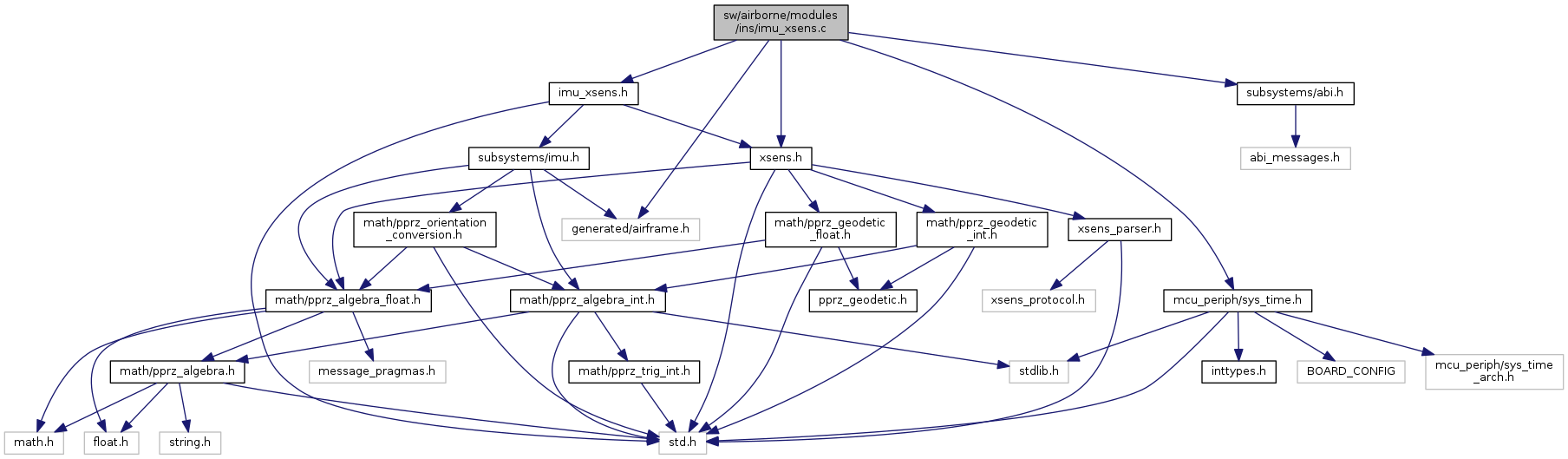
#include "imu_xsens.h"#include "xsens.h"#include "generated/airframe.h"#include "mcu_periph/sys_time.h"#include "subsystems/abi.h" Include dependency graph for imu_xsens.c:
Include dependency graph for imu_xsens.c:Go to the source code of this file.
Functions | |
| static void | handle_ins_msg (void) |
| void | imu_xsens_init (void) |
| void | imu_xsens_event (void) |
XSENS to just provide IMU measurements.
For use with an external AHRS algorithm.
Definition in file imu_xsens.c.
|
static |
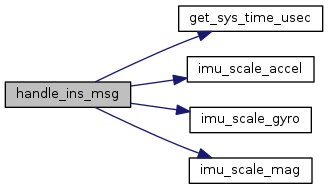
Definition at line 53 of file imu_xsens.c.
References Xsens::accel, Imu::accel, Xsens::accel_available, ACCEL_BFP_OF_REAL, Imu::accel_unscaled, ACCELS_BFP_OF_REAL, FALSE, get_sys_time_usec(), Xsens::gyro, Imu::gyro, Xsens::gyro_available, Imu::gyro_unscaled, imu, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), IMU_XSENS_ID, Xsens::mag, Imu::mag, Xsens::mag_available, MAG_BFP_OF_REAL, Imu::mag_unscaled, MAGS_BFP_OF_REAL, FloatRates::p, FloatRates::q, FloatRates::r, RATE_BFP_OF_REAL, RATES_ASSIGN, RATES_BFP_OF_REAL, VECT3_ASSIGN, and xsens.
Referenced by imu_xsens_event().
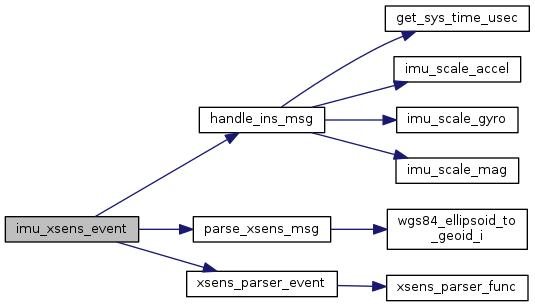
Here is the call graph for this function: Here is the caller graph for this function:| void imu_xsens_event | ( | void | ) |
Definition at line 43 of file imu_xsens.c.
References FALSE, handle_ins_msg(), XsensParser::msg_received, parse_xsens_msg(), Xsens::parser, xsens, and xsens_parser_event().
Here is the call graph for this function:| void imu_xsens_init | ( | void | ) |
Definition at line 38 of file imu_xsens.c.
References xsens_init().
Here is the call graph for this function: 1.8.8
1.8.8