|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
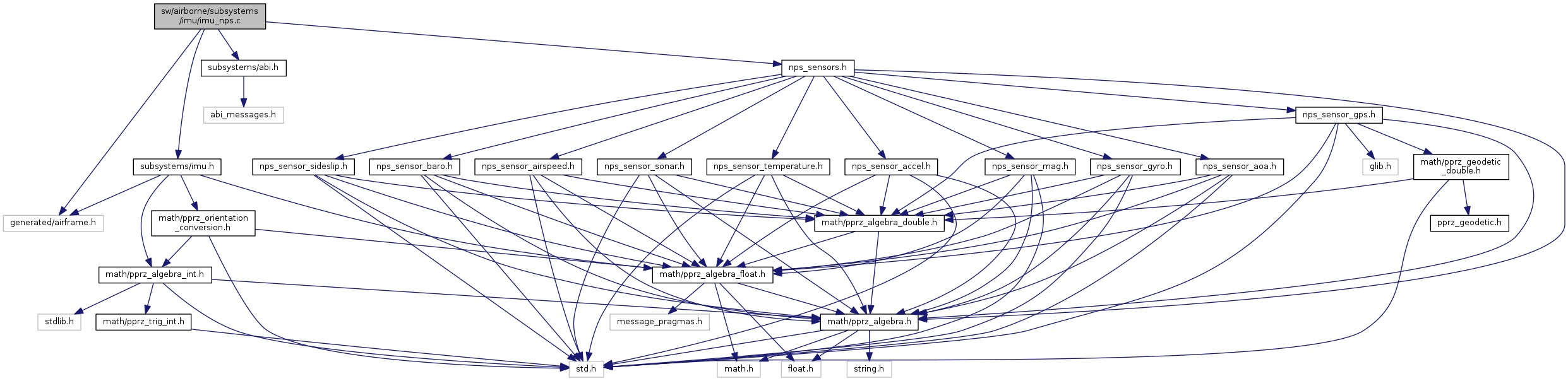
#include "subsystems/imu.h"#include "subsystems/abi.h"#include "generated/airframe.h"#include "nps_sensors.h" Include dependency graph for imu_nps.c:
Include dependency graph for imu_nps.c:Go to the source code of this file.
Functions | |
| void | imu_nps_init (void) |
| void | imu_feed_gyro_accel (void) |
| void | imu_feed_mag (void) |
| void | imu_nps_event (void) |
Variables | |
| struct ImuNps | imu_nps |
| void imu_feed_gyro_accel | ( | void | ) |
Definition at line 40 of file imu_nps.c.
References NpsSensors::accel, ImuNps::accel_available, Imu::accel_unscaled, NpsSensors::gyro, ImuNps::gyro_available, Imu::gyro_unscaled, imu, imu_nps, RATES_ASSIGN, sensors, NpsSensorAccel::value, NpsSensorGyro::value, VECT3_ASSIGN, DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| void imu_feed_mag | ( | void | ) |
Definition at line 53 of file imu_nps.c.
References imu, imu_nps, NpsSensors::mag, ImuNps::mag_available, Imu::mag_unscaled, sensors, NpsSensorMag::value, VECT3_ASSIGN, DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by nps_autopilot_run_step().
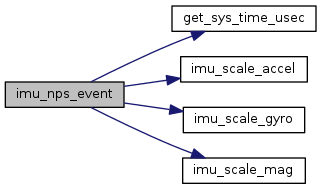
Here is the caller graph for this function:| void imu_nps_event | ( | void | ) |
Definition at line 61 of file imu_nps.c.
References Imu::accel, ImuNps::accel_available, get_sys_time_usec(), Imu::gyro, ImuNps::gyro_available, imu, IMU_BOARD_ID, imu_nps, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), Imu::mag, and ImuNps::mag_available.
Here is the call graph for this function:| void imu_nps_init | ( | void | ) |
Definition at line 30 of file imu_nps.c.
References ImuNps::accel_available, ImuNps::gyro_available, imu_nps, and ImuNps::mag_available.
| struct ImuNps imu_nps |
Definition at line 28 of file imu_nps.c.
Referenced by imu_feed_gyro_accel(), imu_feed_mag(), imu_nps_event(), and imu_nps_init().
 1.8.8
1.8.8