|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal filter (x,y) to estimate position and velocity. More...
#include "subsystems/ins/hf_float.h"#include "subsystems/imu.h"#include "state.h"#include "subsystems/gps.h"#include <stdlib.h>#include "filters/low_pass_filter.h"#include "generated/airframe.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for hf_float.c:
Include dependency graph for hf_float.c:Go to the source code of this file.
Macros | |
| #define | PRINT_DBG(_l, _p) {} |
| #define | AHRS_PROPAGATE_FREQUENCY PERIODIC_FREQUENCY |
| #define | HFF_FREQ (AHRS_PROPAGATE_FREQUENCY / HFF_PRESCALER) |
| horizontal filter propagation frequency More... | |
| #define | HFF_DT (1./HFF_FREQ) |
| #define | HFF_INIT_PXX 1. |
| initial covariance diagonal More... | |
| #define | HFF_ACCEL_NOISE 0.5 |
| process noise (is the same for x and y) More... | |
| #define | HFF_Q HFF_ACCEL_NOISE |
| #define | HFF_Qdotdot HFF_ACCEL_NOISE |
| #define | HFF_R_POS 8. |
| #define | HFF_R_POS_MIN 3. |
| #define | HFF_R_GPS_SPEED 2. |
| #define | HFF_R_GPS_SPEED_MIN 0.25 |
| #define | HFF_UPDATE_GPS_SPEED TRUE |
| #define | HFF_LOWPASS_CUTOFF_FREQUENCY 14 |
| #define | HFF_Qbiasbias 1e-7 |
| #define | SAVE_NOW 0 |
| #define | SAVING -1 |
| #define | SAVE_DONE -2 |
| #define | HFF_LOST_LIMIT 1000 |
Functions | |
| static void | hff_init_x (float init_x, float init_xdot, float init_xbias) |
| static void | hff_init_y (float init_y, float init_ydot, float init_ybias) |
| static void | hff_propagate_x (struct HfilterFloat *filt, float dt) |
| Propagate the filter in time. More... | |
| static void | hff_propagate_y (struct HfilterFloat *filt, float dt) |
| static void | hff_update_x (struct HfilterFloat *filt, float x_meas, float Rpos) |
| static void | hff_update_y (struct HfilterFloat *filt, float y_meas, float Rpos) |
| static void | hff_update_xdot (struct HfilterFloat *filt, float vel, float Rvel) |
| static void | hff_update_ydot (struct HfilterFloat *filt, float vel, float Rvel) |
| static void | send_hff (struct transport_tx *trans, struct link_device *dev) |
| static void | send_hff_debug (struct transport_tx *trans, struct link_device *dev) |
| void | hff_init (float init_x, float init_xdot, float init_y, float init_ydot) |
| void | hff_propagate (void) |
| void | hff_update_gps (struct FloatVect2 *pos_ned, struct FloatVect2 *speed_ned) |
| void | hff_realign (struct FloatVect2 pos, struct FloatVect2 vel) |
| void | hff_update_pos (struct FloatVect2 pos, struct FloatVect2 Rpos) |
| Update position. More... | |
| void | hff_update_vel (struct FloatVect2 vel, struct FloatVect2 Rvel) |
Variables | |
| Butterworth2LowPass_int | filter_x |
| Butterworth2LowPass_int | filter_y |
| Butterworth2LowPass_int | filter_z |
| float | Rgps_pos |
| float | Rgps_vel |
| struct HfilterFloat | hff |
| static float | hff_xdd_meas = 0 |
| static float | hff_ydd_meas = 0 |
| static float | hff_xd_meas = 0 |
| static float | hff_yd_meas = 0 |
| static float | hff_x_meas = 0 |
| static float | hff_y_meas = 0 |
| static int | hff_ps_counter |
| counter for hff propagation More... | |
| struct HfilterFloat * | hff_rb_last |
| ringbuffer read pointer More... | |
| static int | hff_rb_n |
| ringbuffer fill count More... | |
| static int16_t | lag_counter_err |
| by how many steps the estimated GPS validity point in time differed from GPS_LAG_N More... | |
| static int16_t | save_counter |
| counts down the propagation steps until the filter state is saved again More... | |
| static int | past_save_counter |
| static uint16_t | hff_lost_limit |
| static uint16_t | hff_lost_counter |
| static uint16_t | hff_speed_lost_counter |
Horizontal filter (x,y) to estimate position and velocity.
Definition in file hf_float.c.
| #define AHRS_PROPAGATE_FREQUENCY PERIODIC_FREQUENCY |
Definition at line 55 of file hf_float.c.
Referenced by gyro_cb(), and hff_init().
| #define HFF_ACCEL_NOISE 0.5 |
process noise (is the same for x and y)
Definition at line 78 of file hf_float.c.
| #define HFF_DT (1./HFF_FREQ) |
Definition at line 72 of file hf_float.c.
Referenced by hff_init(), and hff_propagate().
| #define HFF_FREQ (AHRS_PROPAGATE_FREQUENCY / HFF_PRESCALER) |
horizontal filter propagation frequency
Definition at line 71 of file hf_float.c.
| #define HFF_INIT_PXX 1. |
initial covariance diagonal
Definition at line 75 of file hf_float.c.
Referenced by hff_init_x(), and hff_init_y().
| #define HFF_LOST_LIMIT 1000 |
Definition at line 209 of file hf_float.c.
Referenced by hff_init().
| #define HFF_LOWPASS_CUTOFF_FREQUENCY 14 |
Definition at line 103 of file hf_float.c.
Referenced by hff_init().
| #define HFF_Q HFF_ACCEL_NOISE |
Definition at line 80 of file hf_float.c.
Referenced by hff_propagate_x(), and hff_propagate_y().
| #define HFF_Qbiasbias 1e-7 |
Definition at line 142 of file hf_float.c.
Referenced by hff_propagate_x(), and hff_propagate_y().
| #define HFF_Qdotdot HFF_ACCEL_NOISE |
Definition at line 81 of file hf_float.c.
Referenced by hff_propagate_x(), and hff_propagate_y().
| #define HFF_R_GPS_SPEED 2. |
Definition at line 92 of file hf_float.c.
Referenced by hff_init().
| #define HFF_R_GPS_SPEED_MIN 0.25 |
Definition at line 95 of file hf_float.c.
Referenced by hff_update_gps().
| #define HFF_R_POS 8. |
Definition at line 85 of file hf_float.c.
Referenced by hff_init().
| #define HFF_R_POS_MIN 3. |
Definition at line 88 of file hf_float.c.
Referenced by hff_update_gps().
| #define HFF_UPDATE_GPS_SPEED TRUE |
Definition at line 99 of file hf_float.c.
| #define PRINT_DBG | ( | _l, | |
| _p | |||
| ) | {} |
Definition at line 50 of file hf_float.c.
Referenced by hff_propagate(), and hff_update_gps().
| #define SAVE_DONE -2 |
Definition at line 207 of file hf_float.c.
Referenced by hff_init(), and hff_realign().
| #define SAVE_NOW 0 |
Definition at line 205 of file hf_float.c.
| #define SAVING -1 |
Definition at line 206 of file hf_float.c.
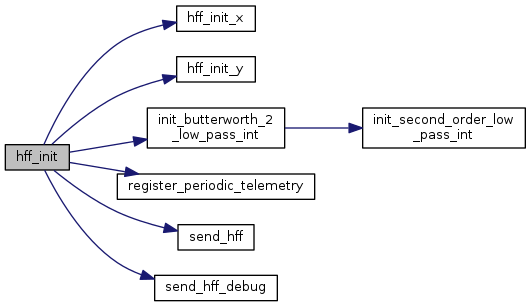
| void hff_init | ( | float | init_x, |
| float | init_xdot, | ||
| float | init_y, | ||
| float | init_ydot | ||
| ) |
Definition at line 274 of file hf_float.c.
References AHRS_PROPAGATE_FREQUENCY, DefaultPeriodic, hff, HFF_DT, hff_init_x(), hff_init_y(), hff_lost_counter, HFF_LOST_LIMIT, hff_lost_limit, HFF_LOWPASS_CUTOFF_FREQUENCY, hff_ps_counter, HFF_R_GPS_SPEED, HFF_R_POS, hff_rb_n, hff_speed_lost_counter, init_butterworth_2_low_pass_int(), HfilterFloat::lag_counter, lag_counter_err, past_save_counter, register_periodic_telemetry(), Rgps_pos, Rgps_vel, HfilterFloat::rollback, save_counter, SAVE_DONE, send_hff(), and send_hff_debug().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 324 of file hf_float.c.
References hff, HFF_INIT_PXX, HFF_STATE_SIZE, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by hff_init().
Here is the caller graph for this function:
|
static |
Definition at line 338 of file hf_float.c.
References hff, HFF_INIT_PXX, HFF_STATE_SIZE, HfilterFloat::y, HfilterFloat::ybias, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by hff_init().
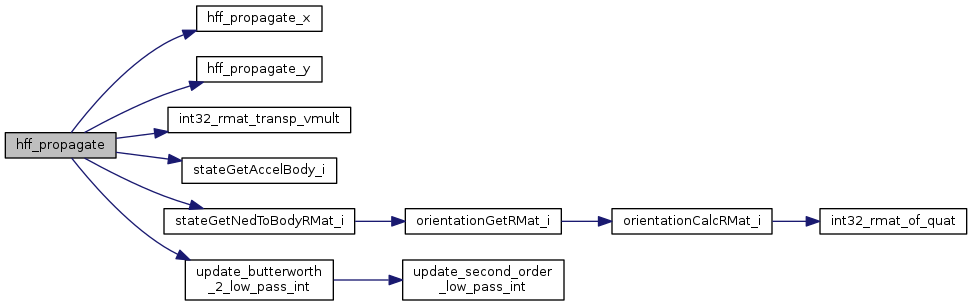
Here is the caller graph for this function:| void hff_propagate | ( | void | ) |
Definition at line 479 of file hf_float.c.
References ACCEL_FLOAT_OF_BFP, hff, HFF_DT, hff_lost_counter, hff_lost_limit, hff_propagate_x(), hff_propagate_y(), hff_ps_counter, hff_rb_n, hff_speed_lost_counter, hff_xdd_meas, hff_ydd_meas, int32_rmat_transp_vmult(), HfilterFloat::lag_counter, PRINT_DBG, HfilterFloat::rollback, save_counter, stateGetAccelBody_i(), stateGetNedToBodyRMat_i(), update_butterworth_2_low_pass_int(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ins_int_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Propagate the filter in time.
F = [ 1 dt -dt^2/2 0 1 -dt 0 0 1 ];
B = [ dt^2/2 dt 0]';
Q = [ HFF_Q 0 0 0 HFF_Qdotdot 0 0 0 HFF_Qbiasbias ];
Xk1 = F * Xk0 + B * accel;
Pk1 = F * Pk0 * F' + Q;
Definition at line 638 of file hf_float.c.
References HFF_Q, HFF_Qbiasbias, HFF_Qdotdot, hff_xdd_meas, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, HfilterFloat::xdotdot, and HfilterFloat::xP.
Referenced by hff_propagate().
Here is the caller graph for this function:
|
static |
Definition at line 666 of file hf_float.c.
References HFF_Q, HFF_Qbiasbias, HFF_Qdotdot, hff_ydd_meas, HfilterFloat::y, HfilterFloat::ybias, HfilterFloat::ydot, HfilterFloat::ydotdot, and HfilterFloat::yP.
Referenced by hff_propagate().
Here is the caller graph for this function:| void hff_realign | ( | struct FloatVect2 | pos, |
| struct FloatVect2 | vel | ||
| ) |
Definition at line 602 of file hf_float.c.
References hff, hff_rb_n, past_save_counter, save_counter, SAVE_DONE, HfilterFloat::x, FloatVect2::x, HfilterFloat::xbias, HfilterFloat::xdot, HfilterFloat::y, FloatVect2::y, HfilterFloat::ybias, and HfilterFloat::ydot.
Referenced by ins_int_update_gps().
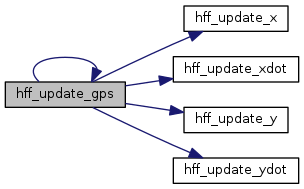
Here is the caller graph for this function:| void hff_update_gps | ( | struct FloatVect2 * | pos_ned, |
| struct FloatVect2 * | speed_ned | ||
| ) |
Definition at line 541 of file hf_float.c.
References gps, hff, hff_lost_counter, HFF_R_GPS_SPEED_MIN, HFF_R_POS_MIN, hff_rb_n, hff_update_gps(), hff_update_x(), hff_update_xdot(), hff_update_y(), hff_update_ydot(), HfilterFloat::lag_counter, lag_counter_err, GpsState::pacc, past_save_counter, PRINT_DBG, Rgps_pos, Rgps_vel, HfilterFloat::rollback, GpsState::sacc, save_counter, HfilterFloat::x, FloatVect2::x, HfilterFloat::y, and FloatVect2::y.
Referenced by hff_update_gps(), and ins_int_update_gps().
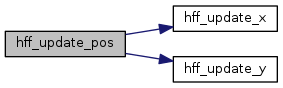
Here is the call graph for this function: Here is the caller graph for this function:| void hff_update_pos | ( | struct FloatVect2 | pos, |
| struct FloatVect2 | Rpos | ||
| ) |
Update position.
H = [1 0 0]; R = 0.1; // state residual y = rangemeter - H * Xm; // covariance residual S = H*Pm*H' + R; // kalman gain K = Pm*H'*inv(S); // update state Xp = Xm + K*y; // update covariance Pp = Pm - K*H*Pm;
Definition at line 711 of file hf_float.c.
References hff, hff_lost_counter, hff_update_x(), hff_update_y(), FloatVect2::x, and FloatVect2::y.
Referenced by pos_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void hff_update_vel | ( | struct FloatVect2 | vel, |
| struct FloatVect2 | Rvel | ||
| ) |
Definition at line 806 of file hf_float.c.
References hff, hff_speed_lost_counter, hff_update_xdot(), hff_update_ydot(), FloatVect2::x, and FloatVect2::y.
Referenced by vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 718 of file hf_float.c.
References hff_x_meas, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by hff_update_gps(), and hff_update_pos().
Here is the caller graph for this function:
|
static |
Definition at line 820 of file hf_float.c.
References hff_xd_meas, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by hff_update_gps(), and hff_update_vel().
Here is the caller graph for this function:
|
static |
Definition at line 753 of file hf_float.c.
References hff_y_meas, HfilterFloat::y, HfilterFloat::ybias, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by hff_update_gps(), and hff_update_pos().
Here is the caller graph for this function:
|
static |
Definition at line 855 of file hf_float.c.
References hff_yd_meas, HfilterFloat::y, HfilterFloat::ybias, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by hff_update_gps(), and hff_update_vel().
Here is the caller graph for this function:
|
static |
Definition at line 234 of file hf_float.c.
References hff, HfilterFloat::x, HfilterFloat::xbias, HfilterFloat::xdot, HfilterFloat::xdotdot, HfilterFloat::y, HfilterFloat::ybias, HfilterFloat::ydot, and HfilterFloat::ydotdot.
Referenced by hff_init().
Here is the caller graph for this function:
|
static |
Definition at line 247 of file hf_float.c.
References hff, hff_x_meas, hff_xd_meas, hff_y_meas, hff_yd_meas, HfilterFloat::xP, and HfilterFloat::yP.
Referenced by hff_init().
Here is the caller graph for this function:| Butterworth2LowPass_int filter_x |
Definition at line 111 of file hf_float.c.
| Butterworth2LowPass_int filter_y |
Definition at line 112 of file hf_float.c.
| Butterworth2LowPass_int filter_z |
Definition at line 113 of file hf_float.c.
| struct HfilterFloat hff |
Definition at line 124 of file hf_float.c.
Referenced by hff_init(), hff_init_x(), hff_init_y(), hff_propagate(), hff_realign(), hff_update_gps(), hff_update_pos(), hff_update_vel(), send_hff(), and send_hff_debug().
|
static |
Definition at line 211 of file hf_float.c.
Referenced by hff_init(), hff_propagate(), hff_update_gps(), and hff_update_pos().
|
static |
Definition at line 210 of file hf_float.c.
Referenced by hff_init(), and hff_propagate().
|
static |
counter for hff propagation
Definition at line 139 of file hf_float.c.
Referenced by hff_init(), and hff_propagate().
| struct HfilterFloat* hff_rb_last |
ringbuffer read pointer
Definition at line 195 of file hf_float.c.
|
static |
ringbuffer fill count
Definition at line 196 of file hf_float.c.
Referenced by hff_init(), hff_propagate(), hff_realign(), and hff_update_gps().
|
static |
Definition at line 211 of file hf_float.c.
Referenced by hff_init(), hff_propagate(), and hff_update_vel().
|
static |
Definition at line 135 of file hf_float.c.
Referenced by hff_update_x(), and send_hff_debug().
|
static |
Definition at line 131 of file hf_float.c.
Referenced by hff_update_xdot(), and send_hff_debug().
|
static |
Definition at line 127 of file hf_float.c.
Referenced by hff_propagate(), and hff_propagate_x().
|
static |
Definition at line 136 of file hf_float.c.
Referenced by hff_update_y(), and send_hff_debug().
|
static |
Definition at line 132 of file hf_float.c.
Referenced by hff_update_ydot(), and send_hff_debug().
|
static |
Definition at line 128 of file hf_float.c.
Referenced by hff_propagate(), and hff_propagate_y().
|
static |
by how many steps the estimated GPS validity point in time differed from GPS_LAG_N
Definition at line 200 of file hf_float.c.
Referenced by hff_init(), and hff_update_gps().
|
static |
Definition at line 204 of file hf_float.c.
Referenced by hff_init(), hff_realign(), and hff_update_gps().
| float Rgps_pos |
Definition at line 116 of file hf_float.c.
Referenced by hff_init(), and hff_update_gps().
| float Rgps_vel |
Definition at line 116 of file hf_float.c.
Referenced by hff_init(), and hff_update_gps().
|
static |
counts down the propagation steps until the filter state is saved again
Definition at line 203 of file hf_float.c.
Referenced by hff_init(), hff_propagate(), hff_realign(), and hff_update_gps().
 1.8.8
1.8.8