|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
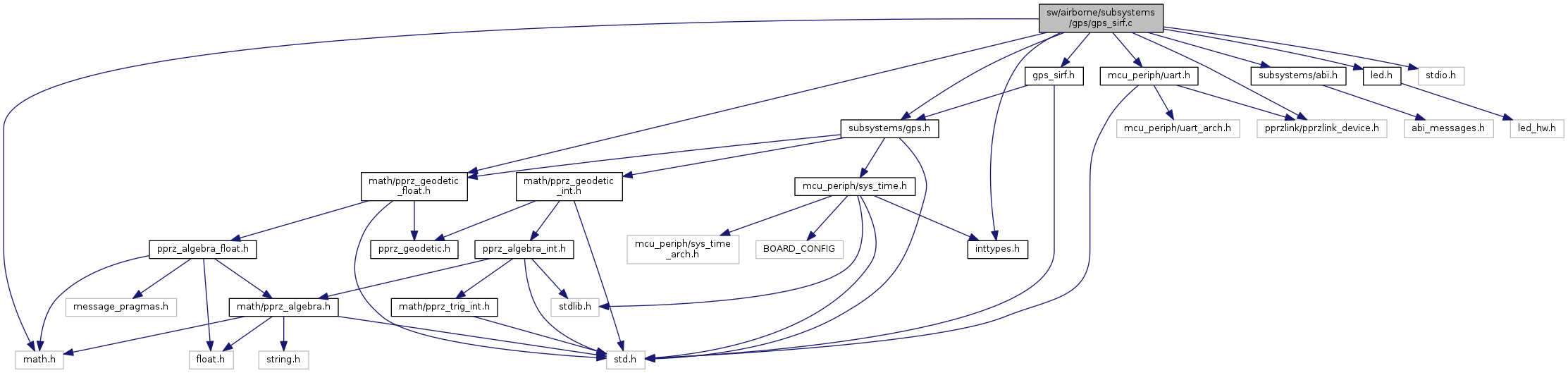
#include "subsystems/gps.h"#include "subsystems/abi.h"#include "led.h"#include "math/pprz_geodetic_float.h"#include <inttypes.h>#include <math.h>#include <stdio.h>#include "gps_sirf.h"#include "pprzlink/pprzlink_device.h"#include "mcu_periph/uart.h" Include dependency graph for gps_sirf.c:
Include dependency graph for gps_sirf.c:Go to the source code of this file.
Data Structures | |
| struct | sirf_msg_2 |
| Message ID 2 from GPS. More... | |
| struct | sirf_msg_41 |
| Message ID 41 from GPS. More... | |
Macros | |
| #define | Invert2Bytes(x) ((x>>8) | (x<<8)) |
| #define | Invert4Bytes(x) ((x>>24) | ((x<<8) & 0x00FF0000) | ((x>>8) & 0x0000FF00) | (x<<24)) |
Functions | |
| void | sirf_parse_char (uint8_t c) |
| void | sirf_parse_msg (void) |
| void | gps_sirf_msg (void) |
| void | sirf_parse_2 (void) |
| void | sirf_parse_41 (void) |
| void | gps_sirf_init (void) |
| void | gps_sirf_event (void) |
Variables | |
| struct GpsSirf | gps_sirf |
| int | start_time = 0 |
| int | ticks = 0 |
| int | start_time2 = 0 |
| int | ticks2 = 0 |
| struct sirf_msg_2 |
Message ID 2 from GPS.
Total payload length should be 41 bytes.
Definition at line 43 of file gps_sirf.c.
| Data Fields | ||
|---|---|---|
| uint8_t | ch10prn | |
| uint8_t | ch11prn | |
| uint8_t | ch12prn | |
| uint8_t | ch1prn | pseudo-random noise, 12 channels |
| uint8_t | ch2prn | |
| uint8_t | ch3prn | |
| uint8_t | ch4prn | |
| uint8_t | ch5prn | |
| uint8_t | ch6prn | |
| uint8_t | ch7prn | |
| uint8_t | ch8prn | |
| uint8_t | ch9prn | |
| uint8_t | hdop | horizontal dilution of precision *5 (0.2 precision) |
| uint8_t | mode1 | |
| uint8_t | mode2 | |
| uint8_t | msg_id | hex value 0x02 ( = decimal 2) |
| uint8_t | num_sat | Number of satellites in fix. |
| uint32_t | tow | time of week in seconds * 10^2 |
| int16_t | vx | x-velocity * 8 in m/s |
| int16_t | vy | y-velocity * 8 in m/s |
| int16_t | vz | z-velocity * 8 in m/s |
| uint16_t | week | |
| int32_t | x_pos | x-position in m |
| int32_t | y_pos | y-position in m |
| int32_t | z_pos | z-position in m |
| struct sirf_msg_41 |
Message ID 41 from GPS.
Total payload length should be 91 bytes.
Definition at line 73 of file gps_sirf.c.
| Data Fields | ||
|---|---|---|
| uint8_t | add_info | Additional mode info. |
| int32_t | alt_ellipsoid | in meters *10^2 |
| int32_t | alt_msl | in meters *10^2 |
| int16_t | climb_rate | in m/s * 10^2 |
| int32_t | clock_bias | in m * 10^2 |
| uint32_t | clock_bias_err | in m * 10^2 |
| int32_t | clock_drift | in m/s * 10^2 |
| uint32_t | clock_drift_err | in m/s * 10^2 |
| uint16_t | cog | course over ground, in degrees clockwise from true north * 10^2 |
| uint8_t | day | |
| uint32_t | distance | Distance traveled since reset in m. |
| uint16_t | distance_err | in meters |
| uint32_t | ehpe | estimated horizontal position error, in meters * 10^2 |
| uint16_t | ehve | estimated horizontal velocity error in m/s * 10^2 |
| uint32_t | ete | estimated time error, in seconds * 10^2 |
| uint32_t | evpe | estimated vertical position error, in meters * 10^2 |
| uint16_t | extended_week_number | |
| uint8_t | hdop | Horizontal dilution of precision x 5 (0.2 precision) |
| uint16_t | heading_err | in degrees * 10^2 |
| int16_t | heading_rate | in deg/s * 10^2 |
| uint8_t | hour | |
| int32_t | latitude | in degrees (+= North) *10^7 |
| int32_t | longitude | in degrees (+= East) *10*7 |
| int16_t | mag_var | not implemented |
| int8_t | map_datum | |
| uint8_t | minute | |
| uint8_t | month | |
| uint8_t | msg_id | hex value 0x29 (= decimal 41) |
| uint16_t | nav_type | |
| uint16_t | nav_valid | if equal to 0x0000, then navigation solution is valid |
| uint8_t | num_sat | Number of satellites used for solution. |
| uint32_t | sat_id | satellites used in solution. Each satellite corresponds with a bit, e.g. bit 1 ON = SV 1 is used in solution |
| uint16_t | second | |
| uint16_t | sog | speed over ground, in m/s * 10^2 |
| uint32_t | tow | time of week in seconds *10^3] |
| uint16_t | year | |
| #define Invert2Bytes | ( | x | ) | ((x>>8) | (x<<8)) |
Definition at line 39 of file gps_sirf.c.
Referenced by sirf_parse_2(), and sirf_parse_41().
| #define Invert4Bytes | ( | x | ) | ((x>>24) | ((x<<8) & 0x00FF0000) | ((x>>8) & 0x0000FF00) | (x<<24)) |
Definition at line 40 of file gps_sirf.c.
Referenced by sirf_parse_2(), and sirf_parse_41().
| void gps_sirf_event | ( | void | ) |
Definition at line 287 of file gps_sirf.c.
References dev, gps_sirf, gps_sirf_msg(), GpsSirf::msg_available, and sirf_parse_char().
Here is the call graph for this function:| void gps_sirf_init | ( | void | ) |
Definition at line 122 of file gps_sirf.c.
References gps_sirf, GpsSirf::msg_available, GpsSirf::msg_len, GpsSirf::msg_valid, and GpsSirf::read_state.
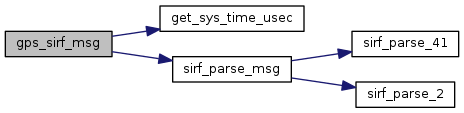
| void gps_sirf_msg | ( | void | ) |
Definition at line 130 of file gps_sirf.c.
References GpsState::fix, get_sys_time_usec(), GPS_FIX_3D, gps_sirf, GPS_SIRF_ID, GpsState::last_3dfix_ticks, GpsState::last_3dfix_time, GpsState::last_msg_ticks, GpsState::last_msg_time, GpsSirf::msg_valid, sys_time::nb_sec, sys_time::nb_sec_rem, sirf_parse_msg(), and GpsSirf::state.
Referenced by gps_sirf_event().
Here is the call graph for this function: Here is the caller graph for this function:| void sirf_parse_2 | ( | void | ) |
Definition at line 232 of file gps_sirf.c.
References GpsState::ecef_pos, GpsState::ecef_vel, GpsState::fix, GPS_FIX_3D, gps_sirf, GPS_VALID_POS_ECEF_BIT, GPS_VALID_VEL_ECEF_BIT, Invert2Bytes, Invert4Bytes, GpsState::last_3dfix_time, GpsSirf::msg_buf, GpsSirf::msg_valid, sys_time::nb_sec, p, GpsSirf::state, GpsState::valid_fields, sirf_msg_2::vx, sirf_msg_2::vy, sirf_msg_2::vz, sirf_msg_2::week, GpsState::week, EcefCoor_i::x, sirf_msg_2::x_pos, EcefCoor_i::y, sirf_msg_2::y_pos, EcefCoor_i::z, and sirf_msg_2::z_pos.
Referenced by sirf_parse_msg().
Here is the caller graph for this function:| void sirf_parse_41 | ( | void | ) |
Definition at line 197 of file gps_sirf.c.
References LlaCoor_i::alt, sirf_msg_41::alt_ellipsoid, sirf_msg_41::alt_msl, GpsState::cacc, sirf_msg_41::cog, GpsState::course, sirf_msg_41::ehpe, sirf_msg_41::ehve, GpsState::fix, GPS_FIX_2D, GPS_FIX_3D, GPS_FIX_NONE, gps_sirf, GPS_VALID_COURSE_BIT, GPS_VALID_HMSL_BIT, GPS_VALID_POS_LLA_BIT, GpsState::gspeed, sirf_msg_41::hdop, sirf_msg_41::heading_err, GpsState::hmsl, Invert2Bytes, Invert4Bytes, LlaCoor_i::lat, sirf_msg_41::latitude, GpsState::lla_pos, LlaCoor_i::lon, sirf_msg_41::longitude, GpsSirf::msg_buf, GpsSirf::msg_valid, sirf_msg_41::nav_type, GpsState::nb_channels, sirf_msg_41::num_sat, GpsState::num_sv, p, GpsState::pacc, GpsState::pdop, GpsState::sacc, sirf_msg_41::sog, GpsSirf::state, sirf_msg_41::tow, GpsState::tow, and GpsState::valid_fields.
Referenced by sirf_parse_msg().
Here is the caller graph for this function:| void sirf_parse_char | ( | uint8_t | c | ) |
Definition at line 147 of file gps_sirf.c.
References GOT_A0, GOT_A2, GOT_B0, gps_sirf, GpsSirf::msg_available, GpsSirf::msg_buf, GpsSirf::msg_len, GpsSirf::read_state, and UNINIT.
Referenced by gps_sirf_event().
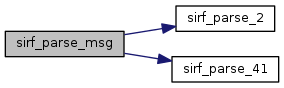
Here is the caller graph for this function:| void sirf_parse_msg | ( | void | ) |
Definition at line 261 of file gps_sirf.c.
References gps_sirf, GpsSirf::msg_buf, GpsSirf::msg_len, GpsSirf::msg_valid, sys_time::nb_sec, sirf_parse_2(), and sirf_parse_41().
Referenced by gps_sirf_msg().
Here is the call graph for this function: Here is the caller graph for this function:| struct GpsSirf gps_sirf |
Definition at line 113 of file gps_sirf.c.
Referenced by gps_sirf_event(), gps_sirf_init(), gps_sirf_msg(), sirf_parse_2(), sirf_parse_41(), sirf_parse_char(), and sirf_parse_msg().
| int start_time = 0 |
Definition at line 192 of file gps_sirf.c.
Referenced by sys_time_register_timer().
| int start_time2 = 0 |
Definition at line 194 of file gps_sirf.c.
| int ticks = 0 |
Definition at line 193 of file gps_sirf.c.
Referenced by sys_time_usleep().
| int ticks2 = 0 |
Definition at line 195 of file gps_sirf.c.
 1.8.8
1.8.8