|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Common flight_plan functions shared between fixedwing and rotorcraft. More...
#include "std.h" Include dependency graph for common_flight_plan.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for common_flight_plan.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | InitStage() nav_init_stage(); |
| #define | Block(x) case x: nav_block=x; |
| #define | NextBlock() nav_goto_block(nav_block + 1) |
| #define | GotoBlock(b) nav_goto_block(b) |
| #define | Stage(s) case s: nav_stage=s; |
| #define | NextStage() { nav_stage++; InitStage(); } INTENTIONAL_FALLTHRU |
| #define | NextStageAndBreak() { nav_stage++; InitStage(); break; } |
| #define | NextStageAndBreakFrom(wp) { last_wp = wp; NextStageAndBreak(); } |
| #define | Label(x) label_ ## x: |
| #define | Goto(x) { goto label_ ## x; } |
| #define | Return(x) { nav_block=last_block; if (x==1) {nav_stage=0;} else {nav_stage=last_stage;} block_time=0;} |
| #define | And(x, y) ((x) && (y)) |
| #define | Or(x, y) ((x) || (y)) |
| #define | Min(x, y) (x < y ? x : y) |
| #define | Max(x, y) (x > y ? x : y) |
| #define | LessThan(_x, _y) ((_x) < (_y)) |
| #define | MoreThan(_x, _y) ((_x) > (_y)) |
| #define | NavBlockTime() (block_time) |
| Time in s since the entrance in the current block. More... | |
Functions | |
| void | nav_init_stage (void) |
| needs to be implemented by fixedwing and rotorcraft seperately More... | |
| void | nav_init_block (void) |
| void | nav_goto_block (uint8_t block_id) |
Variables | |
| uint16_t | stage_time |
| In s. More... | |
| uint16_t | block_time |
| uint8_t | nav_stage |
| uint8_t | nav_block |
| uint8_t | last_block |
| To save the current block/stage to enable return. More... | |
| uint8_t | last_stage |
Common flight_plan functions shared between fixedwing and rotorcraft.
Definition in file common_flight_plan.h.
| #define And | ( | x, | |
| y | |||
| ) | ((x) && (y)) |
Definition at line 59 of file common_flight_plan.h.
| #define Block | ( | x | ) | case x: nav_block=x; |
Definition at line 46 of file common_flight_plan.h.
| #define Goto | ( | x | ) | { goto label_ ## x; } |
Definition at line 56 of file common_flight_plan.h.
| #define GotoBlock | ( | b | ) | nav_goto_block(b) |
Definition at line 48 of file common_flight_plan.h.
| #define InitStage | ( | ) | nav_init_stage(); |
Definition at line 44 of file common_flight_plan.h.
Referenced by nav_eight(), nav_init_block(), and nav_oval().
| #define Label | ( | x | ) | label_ ## x: |
Definition at line 55 of file common_flight_plan.h.
| #define LessThan | ( | _x, | |
| _y | |||
| ) | ((_x) < (_y)) |
Definition at line 63 of file common_flight_plan.h.
| #define Max | ( | x, | |
| y | |||
| ) | (x > y ? x : y) |
Definition at line 62 of file common_flight_plan.h.
| #define Min | ( | x, | |
| y | |||
| ) | (x < y ? x : y) |
Definition at line 61 of file common_flight_plan.h.
| #define MoreThan | ( | _x, | |
| _y | |||
| ) | ((_x) > (_y)) |
Definition at line 64 of file common_flight_plan.h.
| #define NavBlockTime | ( | ) | (block_time) |
Time in s since the entrance in the current block.
Definition at line 67 of file common_flight_plan.h.
| #define NextBlock | ( | ) | nav_goto_block(nav_block + 1) |
Definition at line 47 of file common_flight_plan.h.
Definition at line 51 of file common_flight_plan.h.
Definition at line 52 of file common_flight_plan.h.
| #define NextStageAndBreakFrom | ( | wp | ) | { last_wp = wp; NextStageAndBreak(); } |
Definition at line 53 of file common_flight_plan.h.
| #define Or | ( | x, | |
| y | |||
| ) | ((x) || (y)) |
Definition at line 60 of file common_flight_plan.h.
| #define Return | ( | x | ) | { nav_block=last_block; if (x==1) {nav_stage=0;} else {nav_stage=last_stage;} block_time=0;} |
Definition at line 57 of file common_flight_plan.h.
Definition at line 50 of file common_flight_plan.h.
| void nav_goto_block | ( | uint8_t | block_id | ) |
Definition at line 51 of file common_flight_plan.c.
References last_block, last_stage, nav_block, nav_init_block(), and nav_stage.
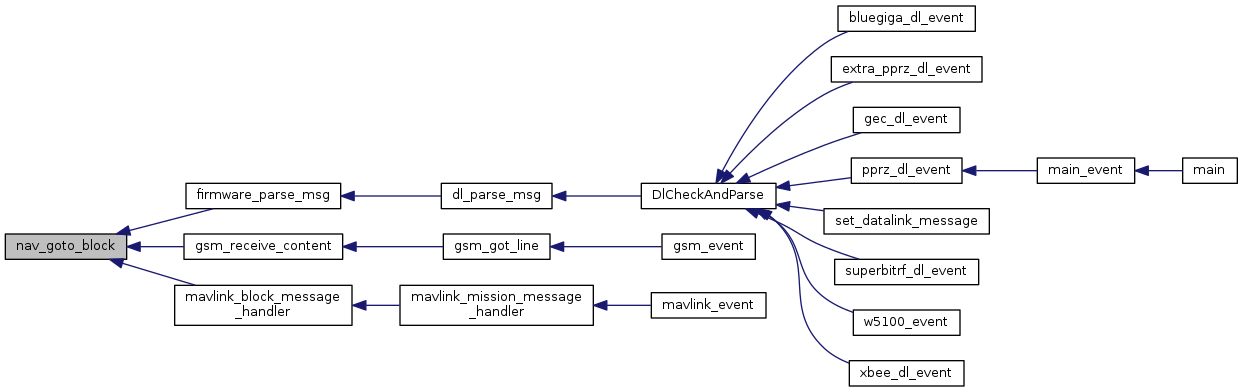
Referenced by firmware_parse_msg(), gsm_receive_content(), and mavlink_block_message_handler().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_init_block | ( | void | ) |
Definition at line 41 of file common_flight_plan.c.
References block_time, InitStage, nav_block, and nav_stage.
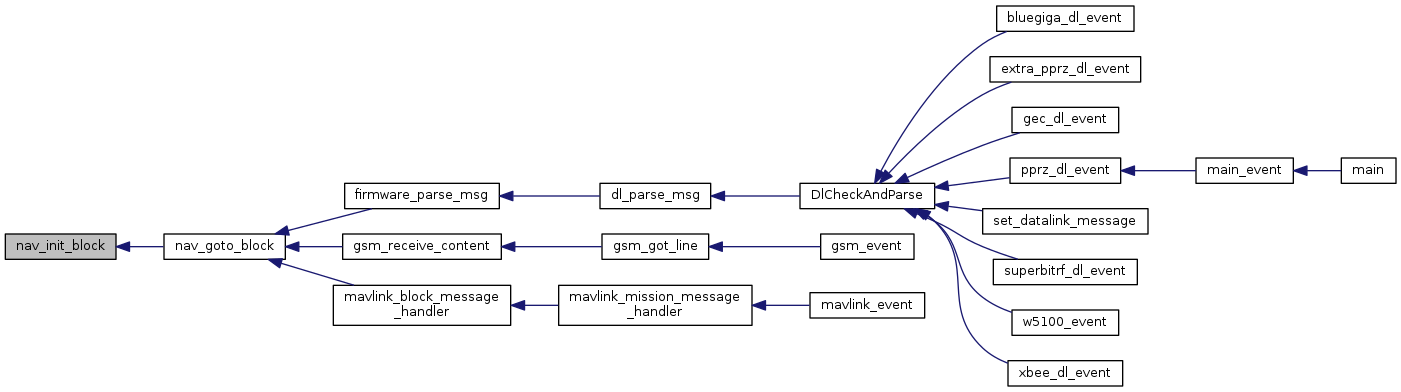
Referenced by nav_goto_block().
Here is the caller graph for this function:| void nav_init_stage | ( | void | ) |
needs to be implemented by fixedwing and rotorcraft seperately
Definition at line 93 of file nav.c.
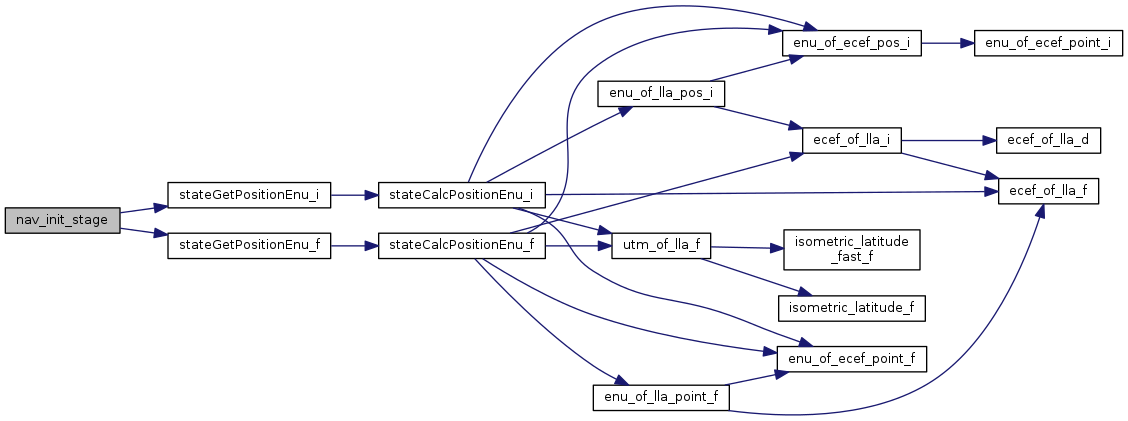
References RoverNavigation::last_pos, nav, nav_circle_radians, nav_last_point, stage_time, stateGetPositionEnu_f(), stateGetPositionEnu_i(), VECT3_COPY, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by gvf_nav_survey_polygon_run(), nav_bungee_takeoff_run(), nav_flower_run(), nav_line_border_run(), nav_line_osam_run(), nav_line_run(), nav_skid_landing_run(), nav_survey_disc_run(), nav_survey_poly_osam_run(), nav_survey_poly_run(), nav_survey_polygon_run(), nav_survey_zamboni_run(), and nav_vertical_raster_run().
Here is the call graph for this function: Here is the caller graph for this function:| uint16_t block_time |
Definition at line 33 of file common_flight_plan.c.
Referenced by common_nav_periodic_task_4Hz(), nav_init_block(), nav_periodic_task(), and send_nav_status().
| uint8_t last_block |
To save the current block/stage to enable return.
Definition at line 38 of file common_flight_plan.c.
Referenced by nav_goto_block().
| uint8_t last_stage |
Definition at line 38 of file common_flight_plan.c.
Referenced by nav_goto_block().
| uint8_t nav_block |
Definition at line 35 of file common_flight_plan.c.
Referenced by generic_com_periodic(), mavlink_mission_periodic(), nav_goto_block(), nav_init(), nav_init_block(), and send_nav_status().
| uint8_t nav_stage |
Definition at line 35 of file common_flight_plan.c.
Referenced by nav_goto_block(), nav_init(), nav_init_block(), and send_nav_status().
| uint16_t stage_time |
In s.
Definition at line 33 of file common_flight_plan.c.
Referenced by common_nav_periodic_task_4Hz(), nav_heli_spinup_run(), nav_init_stage(), nav_periodic_task(), and send_nav_status().
 1.8.8
1.8.8