|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
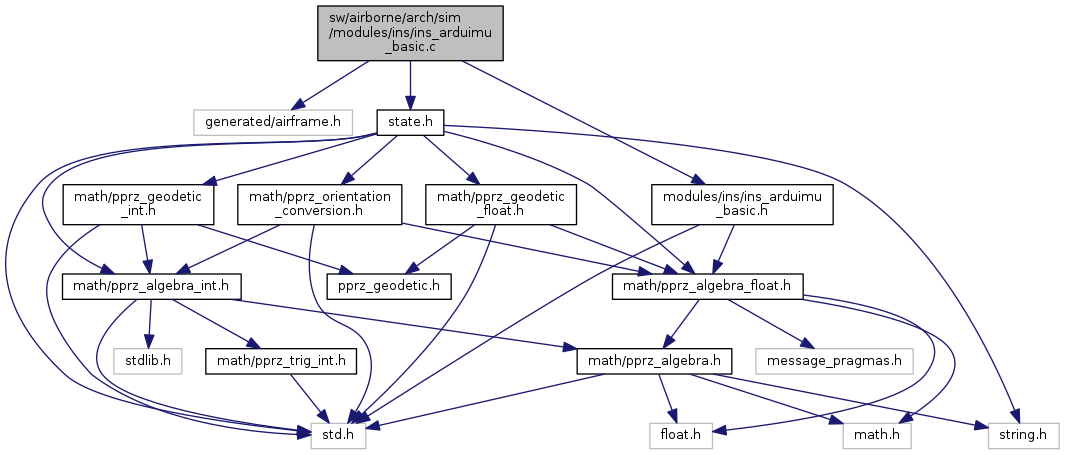
 Include dependency graph for ins_arduimu_basic.c:
Include dependency graph for ins_arduimu_basic.c:Go to the source code of this file.
Functions | |
| void | ArduIMU_init (void) |
| void | ArduIMU_periodic (void) |
| void | ArduIMU_periodicGPS (void) |
| void | ArduIMU_event (void) |
Variables | |
| struct FloatEulers | arduimu_eulers |
| ArduIMU simulation. More... | |
| struct FloatRates | arduimu_rates |
| struct FloatVect3 | arduimu_accel |
| float | ins_roll_neutral |
| float | ins_pitch_neutral |
| bool | arduimu_calibrate_neutrals |
| float | sim_phi |
| in radians More... | |
| float | sim_theta |
| in radians More... | |
| float | sim_p |
| in radians/s More... | |
| float | sim_q |
| in radians/s More... | |
| float | sim_r |
| in radians/s More... | |
| void ArduIMU_event | ( | void | ) |
Definition at line 41 of file ins_arduimu_basic.c.
| void ArduIMU_init | ( | void | ) |
Definition at line 27 of file ins_arduimu_basic.c.
| void ArduIMU_periodic | ( | void | ) |
Definition at line 28 of file ins_arduimu_basic.c.
References ins_pitch_neutral, ins_roll_neutral, sim_p, sim_phi, sim_q, sim_r, sim_theta, stateSetBodyRates_f(), and stateSetNedToBodyEulers_f().
Here is the call graph for this function:| void ArduIMU_periodicGPS | ( | void | ) |
Definition at line 40 of file ins_arduimu_basic.c.
| struct FloatVect3 arduimu_accel |
Definition at line 14 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| bool arduimu_calibrate_neutrals |
Definition at line 18 of file ins_arduimu_basic.c.
Referenced by ArduIMU_init(), and ArduIMU_periodicGPS().
| struct FloatEulers arduimu_eulers |
ArduIMU simulation.
Sim provides attitude and rates.
Definition at line 12 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| struct FloatRates arduimu_rates |
Definition at line 13 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| float ins_pitch_neutral |
Definition at line 17 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), ArduIMU_init(), and ArduIMU_periodic().
| float ins_roll_neutral |
Definition at line 16 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), ArduIMU_init(), and ArduIMU_periodic().
| float sim_p |
| float sim_phi |
| float sim_q |
| float sim_r |
| float sim_theta |
 1.8.8
1.8.8