|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Vectornav VN-200 as AHRS. More...
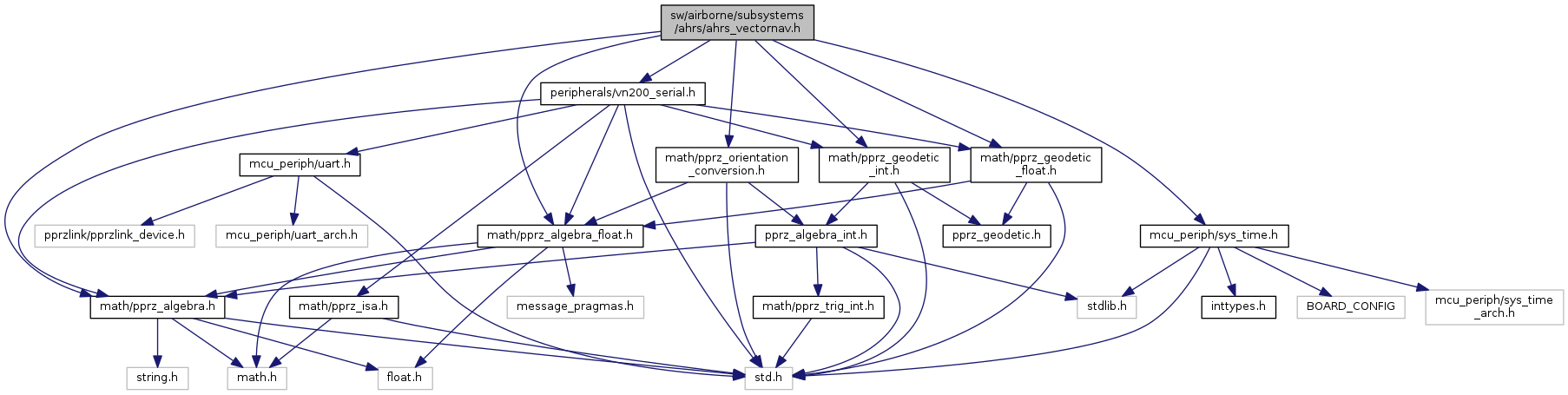
#include "peripherals/vn200_serial.h"#include "mcu_periph/sys_time.h"#include "math/pprz_algebra.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_algebra_float.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_orientation_conversion.h" Include dependency graph for ahrs_vectornav.h: This graph shows which files directly or indirectly include this file:
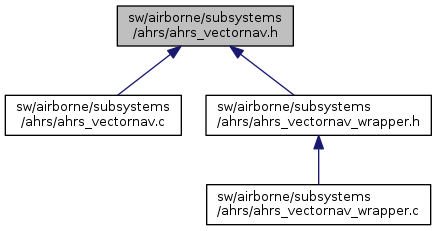
Include dependency graph for ahrs_vectornav.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AhrsVectornav |
Functions | |
| void | ahrs_vectornav_init (void) |
| Initialize Vectornav struct. More... | |
| void | ahrs_vectornav_event (void) |
| Event handling for Vectornav. More... | |
| void | ahrs_vectornav_propagate (void) |
| Read received data. More... | |
Variables | |
| struct AhrsVectornav | ahrs_vn |
Vectornav VN-200 as AHRS.
Definition in file ahrs_vectornav.h.
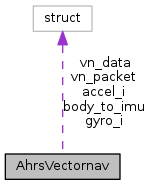
| struct AhrsVectornav |
Definition at line 47 of file ahrs_vectornav.h.
Collaboration diagram for AhrsVectornav:| Data Fields | ||
|---|---|---|
| struct Int32Vect3 | accel_i | |
| struct OrientationReps | body_to_imu | body_to_imu rotation |
| struct Int32Rates | gyro_i | |
| uint16_t | vn_chksm | aux variable for checksum |
| struct VNData | vn_data | Data struct. |
| float | vn_freq | data frequency |
| struct VNPacket | vn_packet | Packet struct. |
| enum VNStatus | vn_status | VN status. |
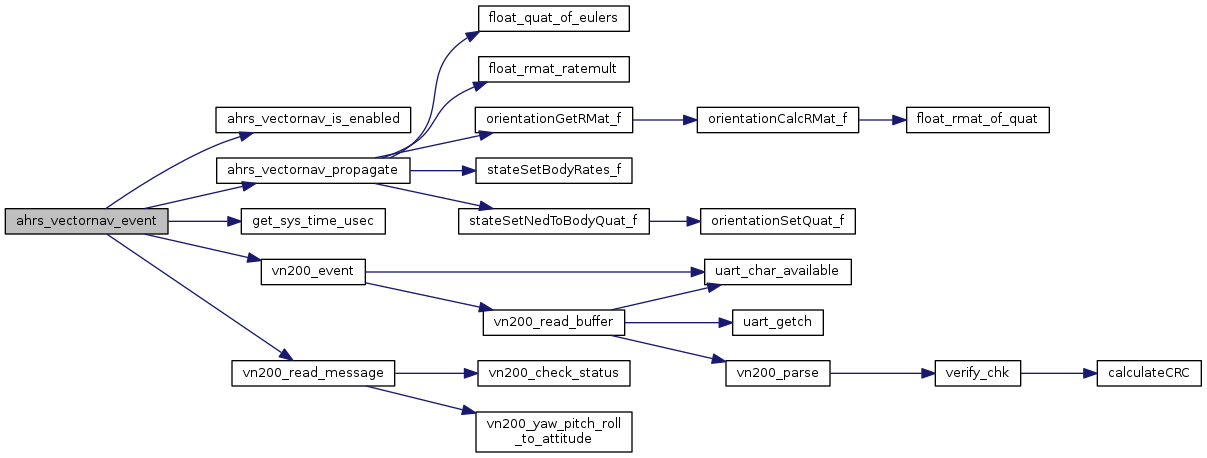
| void ahrs_vectornav_event | ( | void | ) |
Event handling for Vectornav.
Definition at line 66 of file ahrs_vectornav.c.
References VNData::accel, AhrsVectornav::accel_i, ACCELS_BFP_OF_REAL, ahrs_vectornav_is_enabled(), ahrs_vectornav_propagate(), ahrs_vn, get_sys_time_usec(), VNData::gyro, AhrsVectornav::gyro_i, IMU_VECTORNAV_ID, VNPacket::msg_available, RATES_BFP_OF_REAL, vn200_event(), vn200_read_message(), AhrsVectornav::vn_data, and AhrsVectornav::vn_packet.
Here is the call graph for this function:| void ahrs_vectornav_init | ( | void | ) |
Initialize Vectornav struct.
Definition at line 94 of file ahrs_vectornav.c.
References AhrsVectornav::accel_i, ahrs_vn, VNPacket::chksm_error, DefaultPeriodic, VNPacket::framing_error, VNPacket::hdr_error, INT32_VECT3_ZERO, VNPacket::msg_available, VNPacket::msg_idx, VNPacket::noise_error, VNPacket::overrun_error, register_periodic_telemetry(), send_vn_info(), VNPacket::status, AhrsVectornav::vn_data, AhrsVectornav::vn_freq, AhrsVectornav::vn_packet, AhrsVectornav::vn_status, VNMsgSync, and VNNotTracking.
Referenced by ahrs_vectornav_register().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_vectornav_propagate | ( | void | ) |
Read received data.
Definition at line 123 of file ahrs_vectornav.c.
References ahrs_vn, VNData::attitude, AhrsVectornav::body_to_imu, float_quat_of_eulers(), float_rmat_ratemult(), VNData::gyro, orientationGetRMat_f(), stateSetBodyRates_f(), stateSetNedToBodyQuat_f(), and AhrsVectornav::vn_data.
Referenced by ahrs_vectornav_event().
Here is the call graph for this function: Here is the caller graph for this function:| struct AhrsVectornav ahrs_vn |
Definition at line 31 of file ahrs_vectornav.c.
Referenced by ahrs_vectornav_event(), ahrs_vectornav_init(), ahrs_vectornav_propagate(), send_euler(), and send_vn_info().
 1.8.8
1.8.8