|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Dummy stabilization for rotorcrafts. More...
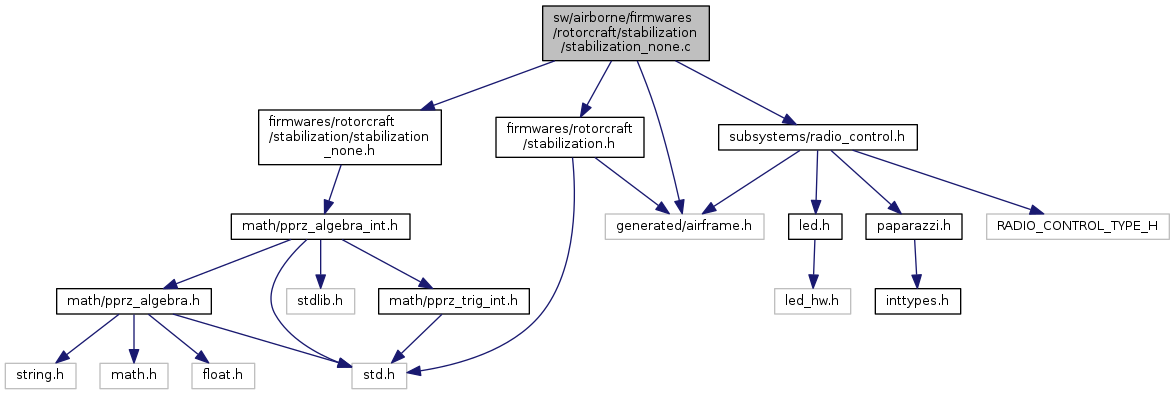
#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/stabilization/stabilization_none.h"#include "subsystems/radio_control.h"#include "generated/airframe.h" Include dependency graph for stabilization_none.c:
Include dependency graph for stabilization_none.c:Go to the source code of this file.
Functions | |
| void | stabilization_none_init (void) |
| void | stabilization_none_read_rc (void) |
| void | stabilization_none_enter (void) |
| void | stabilization_none_run (bool in_flight) |
Variables | |
| struct Int32Rates | stabilization_none_rc_cmd |
Dummy stabilization for rotorcrafts.
Doesn't actually do any stabilization, just directly passes the RC commands along.
Definition in file stabilization_none.c.
| void stabilization_none_enter | ( | void | ) |
Definition at line 50 of file stabilization_none.c.
References INT_RATES_ZERO, and stabilization_none_rc_cmd.
Referenced by guidance_h_mode_changed().
Here is the caller graph for this function:| void stabilization_none_init | ( | void | ) |
Definition at line 37 of file stabilization_none.c.
References INT_RATES_ZERO, and stabilization_none_rc_cmd.
| void stabilization_none_read_rc | ( | void | ) |
Definition at line 42 of file stabilization_none.c.
References Int32Rates::p, Int32Rates::q, Int32Rates::r, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_YAW, stabilization_none_rc_cmd, and RadioControl::values.
Referenced by guidance_h_read_rc().
Here is the caller graph for this function:| void stabilization_none_run | ( | bool | in_flight | ) |
Definition at line 55 of file stabilization_none.c.
References Int32Rates::p, Int32Rates::q, Int32Rates::r, stabilization_cmd, and stabilization_none_rc_cmd.
Referenced by guidance_h_run().
Here is the caller graph for this function:| struct Int32Rates stabilization_none_rc_cmd |
Definition at line 35 of file stabilization_none.c.
Referenced by stabilization_none_enter(), stabilization_none_init(), stabilization_none_read_rc(), and stabilization_none_run().
 1.8.8
1.8.8