|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Interface for the IMU on the NavGo board. More...
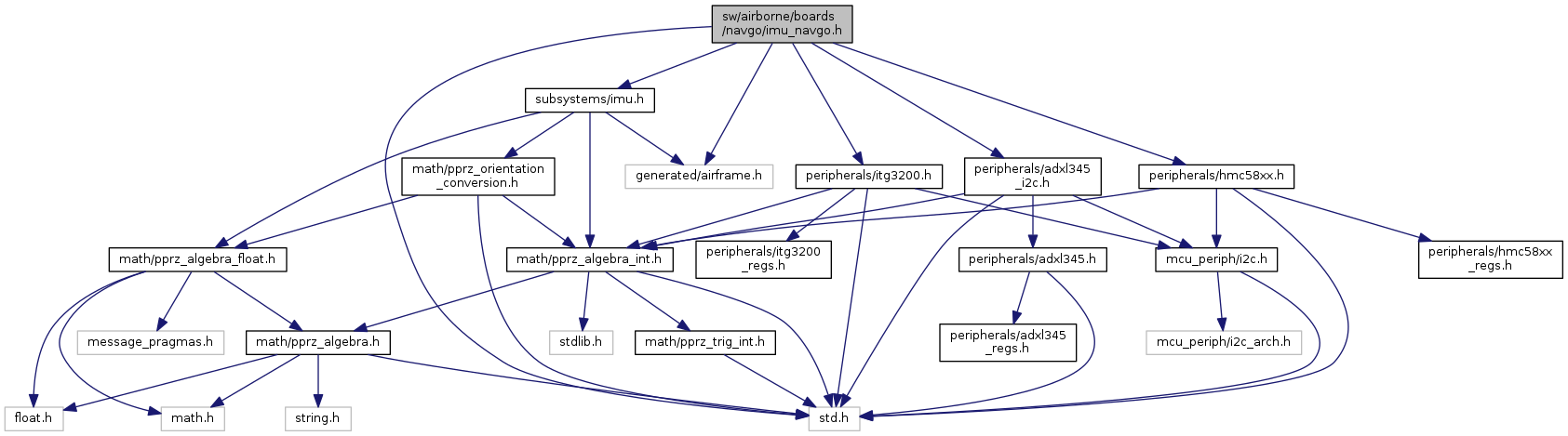
#include "std.h"#include "generated/airframe.h"#include "subsystems/imu.h"#include "peripherals/itg3200.h"#include "peripherals/adxl345_i2c.h"#include "peripherals/hmc58xx.h" Include dependency graph for imu_navgo.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imu_navgo.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ImuNavgo |
Macros | |
| #define | IMU_GYRO_P_SIGN 1 |
| #define | IMU_GYRO_Q_SIGN 1 |
| #define | IMU_GYRO_R_SIGN 1 |
| #define | IMU_ACCEL_X_SIGN 1 |
| #define | IMU_ACCEL_Y_SIGN 1 |
| #define | IMU_ACCEL_Z_SIGN 1 |
| #define | IMU_MAG_X_SIGN 1 |
| #define | IMU_MAG_Y_SIGN 1 |
| #define | IMU_MAG_Z_SIGN 1 |
Functions | |
| void | imu_navgo_init (void) |
| void | imu_navgo_periodic (void) |
| void | imu_navgo_event (void) |
| void | imu_navgo_downlink_raw (void) |
Variables | |
| struct ImuNavgo | imu_navgo |
Interface for the IMU on the NavGo board.
Interface for the IMU on the Umarim board.
Definition in file imu_navgo.h.
| struct ImuNavgo |
Definition at line 62 of file imu_navgo.h.
Collaboration diagram for ImuNavgo:| Data Fields | ||
|---|---|---|
| struct Adxl345_I2c | adxl | |
| struct Hmc58xx | hmc | |
| struct Itg3200 | itg | |
| #define IMU_ACCEL_X_SIGN 1 |
Definition at line 51 of file imu_navgo.h.
| #define IMU_ACCEL_Y_SIGN 1 |
Definition at line 52 of file imu_navgo.h.
| #define IMU_ACCEL_Z_SIGN 1 |
Definition at line 53 of file imu_navgo.h.
| #define IMU_GYRO_P_SIGN 1 |
Definition at line 46 of file imu_navgo.h.
| #define IMU_GYRO_Q_SIGN 1 |
Definition at line 47 of file imu_navgo.h.
| #define IMU_GYRO_R_SIGN 1 |
Definition at line 48 of file imu_navgo.h.
| #define IMU_MAG_X_SIGN 1 |
Definition at line 56 of file imu_navgo.h.
| #define IMU_MAG_Y_SIGN 1 |
Definition at line 57 of file imu_navgo.h.
| #define IMU_MAG_Z_SIGN 1 |
Definition at line 58 of file imu_navgo.h.
| void imu_navgo_downlink_raw | ( | void | ) |
Definition at line 111 of file imu_navgo.c.
References Imu::accel_unscaled, DefaultChannel, DefaultDevice, Imu::gyro_unscaled, imu, Imu::mag_unscaled, Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
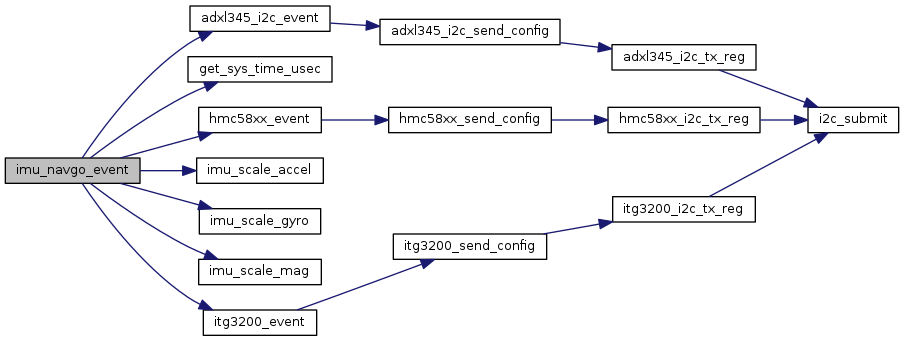
| void imu_navgo_event | ( | void | ) |
Definition at line 120 of file imu_navgo.c.
References Imu::accel, Imu::accel_unscaled, ImuNavgo::adxl, adxl345_i2c_event(), Adxl345_I2c::data, Hmc58xx::data, Itg3200::data, Adxl345_I2c::data_available, Hmc58xx::data_available, Itg3200::data_available, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, ImuNavgo::hmc, hmc58xx_event(), imu, IMU_BOARD_ID, imu_navgo, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), ImuNavgo::itg, itg3200_event(), Imu::mag, Imu::mag_unscaled, median_mag, RATES_ASSIGN, UpdateMedianFilterRatesInt, UpdateMedianFilterVect3Int, VECT3_ASSIGN, and VECT3_COPY.
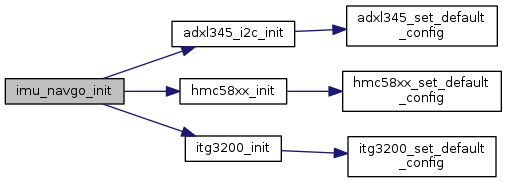
Here is the call graph for this function:| void imu_navgo_init | ( | void | ) |
Definition at line 66 of file imu_navgo.c.
References ImuNavgo::adxl, ADXL345_ADDR_ALT, adxl345_i2c_init(), Adxl345_I2c::config, Itg3200::config, Itg3200Config::dlpf_cfg, ImuNavgo::hmc, HMC58XX_ADDR, hmc58xx_init(), imu_navgo, InitMedianFilterRatesInt, InitMedianFilterVect3Int, ImuNavgo::itg, ITG3200_ADDR_ALT, itg3200_init(), MEDIAN_DEFAULT_SIZE, median_mag, NAVGO_ACCEL_RATE, NAVGO_GYRO_LOWPASS, NAVGO_GYRO_SMPLRT_DIV, Adxl345Config::rate, and Itg3200Config::smplrt_div.
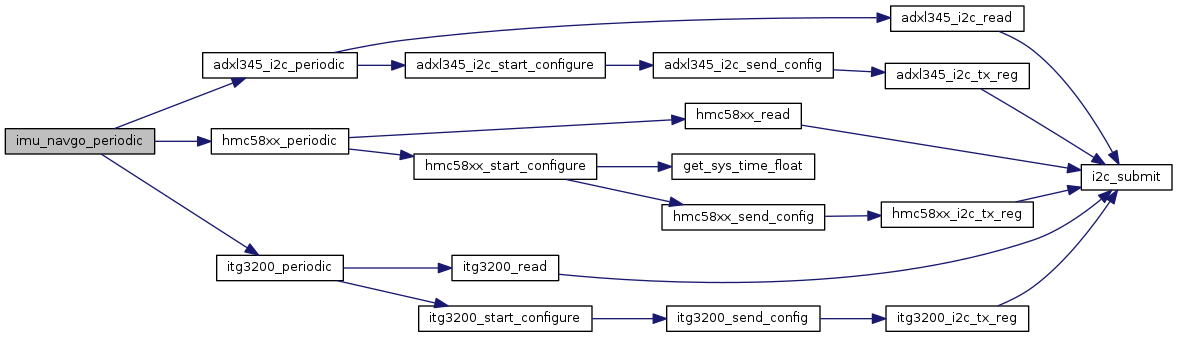
Here is the call graph for this function:| void imu_navgo_periodic | ( | void | ) |
Definition at line 93 of file imu_navgo.c.
References ImuNavgo::adxl, adxl345_i2c_periodic(), ImuNavgo::hmc, hmc58xx_periodic(), imu_navgo, ImuNavgo::itg, itg3200_periodic(), and NAVGO_ACCEL_RATE.
Here is the call graph for this function:| struct ImuNavgo imu_navgo |
Definition at line 64 of file imu_navgo.c.
Referenced by imu_navgo_event(), imu_navgo_init(), and imu_navgo_periodic().
 1.8.8
1.8.8