|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
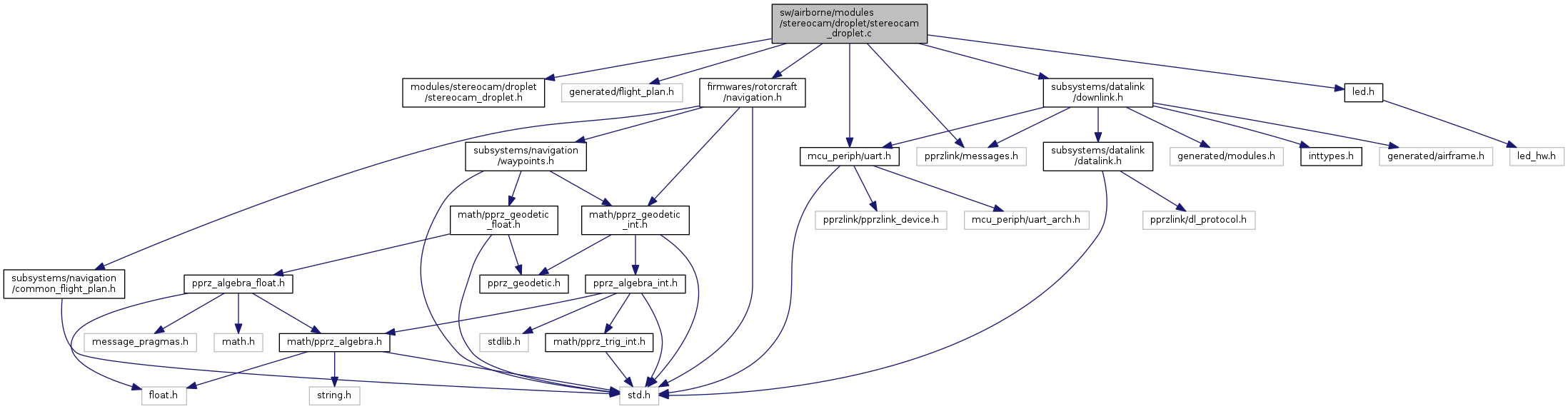
#include "modules/stereocam/droplet/stereocam_droplet.h"#include "generated/flight_plan.h"#include "firmwares/rotorcraft/navigation.h"#include "mcu_periph/uart.h"#include "pprzlink/messages.h"#include "subsystems/datalink/downlink.h"#include "led.h" Include dependency graph for stereocam_droplet.c:
Include dependency graph for stereocam_droplet.c:Go to the source code of this file.
Data Structures | |
| struct | AvoidNavigationStruct |
Macros | |
| #define | STEREO_PORT (&((STEREO_UART).device)) |
| #define | StereoGetch() STEREO_PORT ->get_byte(STEREO_PORT->periph) |
| #define | StereoSend1(c) STEREO_PORT->put_byte(STEREO_PORT->periph, 0, c) |
| #define | StereoUartSend1(c) StereoSend1(c) |
| #define | StereoSend(_dat, _len) { for (uint8_t i = 0; i< (_len); i++) StereoSend1(_dat[i]); }; |
| #define | StereoUartSetBaudrate(_b) uart_periph_set_baudrate(STEREO_PORT, _b); |
| #define | StereoChAvailable() (xdev->char_available(xdev->periph)) |
| #define | DOWNLINK_DEVICE DOWNLINK_AP_DEVICE |
Functions | |
| static void | stereo_parse (uint8_t c) |
| void | stereocam_droplet_init (void) |
| void | stereocam_droplet_periodic (void) |
Variables | |
| struct link_device * | xdev = STEREO_PORT |
| struct AvoidNavigationStruct | avoid_navigation_data |
| global VIDEO state More... | |
Definition in file stereocam_droplet.c.
| struct AvoidNavigationStruct |
Definition at line 69 of file stereocam_droplet.c.
| Data Fields | ||
|---|---|---|
| uint8_t | mode |
0 = straight, 1 = right, 2 = left, ... 0 = nothing, 1 = climb, 2 = sideways, ... |
| uint8_t | stereo_bin[8] | |
| uint8_t | timeout | |
| #define DOWNLINK_DEVICE DOWNLINK_AP_DEVICE |
Definition at line 57 of file stereocam_droplet.c.
Referenced by sdlogger_spi_direct_periodic().
| #define STEREO_PORT (&((STEREO_UART).device)) |
Definition at line 40 of file stereocam_droplet.c.
Definition at line 48 of file stereocam_droplet.c.
Referenced by stereocam_droplet_periodic().
| #define StereoGetch | ( | ) | STEREO_PORT ->get_byte(STEREO_PORT->periph) |
Definition at line 43 of file stereocam_droplet.c.
Referenced by stereocam_droplet_periodic().
| #define StereoSend | ( | _dat, | |
| _len | |||
| ) | { for (uint8_t i = 0; i< (_len); i++) StereoSend1(_dat[i]); }; |
Definition at line 46 of file stereocam_droplet.c.
| #define StereoSend1 | ( | c | ) | STEREO_PORT->put_byte(STEREO_PORT->periph, 0, c) |
Definition at line 44 of file stereocam_droplet.c.
| #define StereoUartSend1 | ( | c | ) | StereoSend1(c) |
Definition at line 45 of file stereocam_droplet.c.
| #define StereoUartSetBaudrate | ( | _b | ) | uart_periph_set_baudrate(STEREO_PORT, _b); |
Definition at line 47 of file stereocam_droplet.c.
|
static |
Definition at line 84 of file stereocam_droplet.c.
References avoid_navigation_data, AvoidNavigationStruct::stereo_bin, and AvoidNavigationStruct::timeout.
Referenced by stereocam_droplet_periodic().
Here is the caller graph for this function:| void stereocam_droplet_init | ( | void | ) |
Definition at line 92 of file stereocam_droplet.c.
References avoid_navigation_data, AvoidNavigationStruct::mode, and AvoidNavigationStruct::timeout.
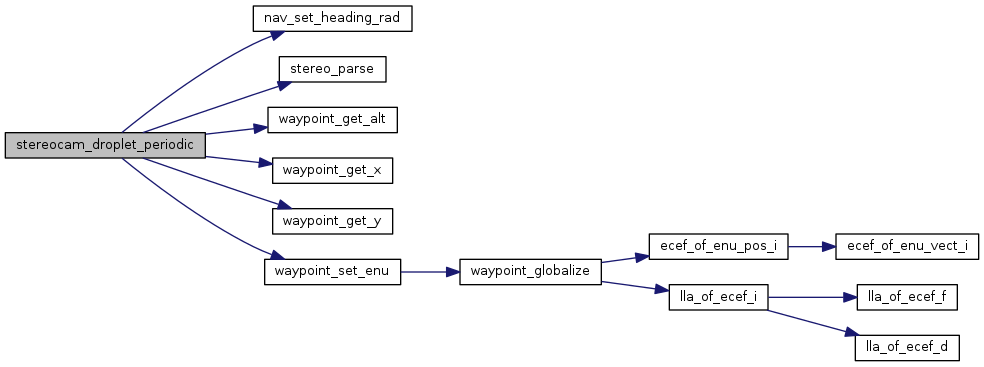
| void stereocam_droplet_periodic | ( | void | ) |
Definition at line 98 of file stereocam_droplet.c.
References ANGLE_FLOAT_OF_BFP, avoid_navigation_data, DefaultChannel, DefaultDevice, heading, LED_OFF, LED_ON, nav_heading, nav_set_heading_rad(), NavSetWaypointHere, obstacle_detected, AvoidNavigationStruct::stereo_bin, stereo_parse(), StereoChAvailable, StereoGetch, AvoidNavigationStruct::timeout, waypoint_get_alt(), waypoint_get_x(), waypoint_get_y(), waypoint_set_enu(), EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:| struct AvoidNavigationStruct avoid_navigation_data |
global VIDEO state
Definition at line 75 of file stereocam_droplet.c.
Referenced by stereo_avoid_init(), stereo_avoid_run(), stereo_parse(), stereocam_droplet_init(), and stereocam_droplet_periodic().
| struct link_device* xdev = STEREO_PORT |
Definition at line 41 of file stereocam_droplet.c.
 1.8.8
1.8.8