|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Vertical guidance for rotorcrafts. More...
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "firmwares/rotorcraft/guidance/guidance_module.h"#include "firmwares/rotorcraft/guidance/guidance_hybrid.h"#include "subsystems/radio_control.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/navigation.h"#include "state.h"#include "math/pprz_algebra_int.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for guidance_v.c:
Include dependency graph for guidance_v.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_V_NOMINAL_HOVER_THROTTLE 0.4 |
| #define | GUIDANCE_V_ADAPT_THROTTLE_ENABLED TRUE |
| #define | GUIDANCE_V_CLIMB_RC_DEADBAND MAX_PPRZ/10 |
| #define | GUIDANCE_V_MAX_RC_CLIMB_SPEED GUIDANCE_V_REF_MIN_ZD |
| #define | GUIDANCE_V_MAX_RC_DESCENT_SPEED GUIDANCE_V_REF_MAX_ZD |
| #define | GUIDANCE_V_MIN_ERR_Z POS_BFP_OF_REAL(-10.) |
| #define | GUIDANCE_V_MAX_ERR_Z POS_BFP_OF_REAL(10.) |
| #define | GUIDANCE_V_MIN_ERR_ZD SPEED_BFP_OF_REAL(-10.) |
| #define | GUIDANCE_V_MAX_ERR_ZD SPEED_BFP_OF_REAL(10.) |
| #define | GUIDANCE_V_MAX_SUM_ERR 2000000 |
| #define | GuidanceVSetRef(_pos, _speed, _accel) |
| #define | FF_CMD_FRAC 18 |
Functions | |
| static int32_t | get_vertical_thrust_coeff (void) |
| get the cosine of the angle between thrust vector and gravity vector More... | |
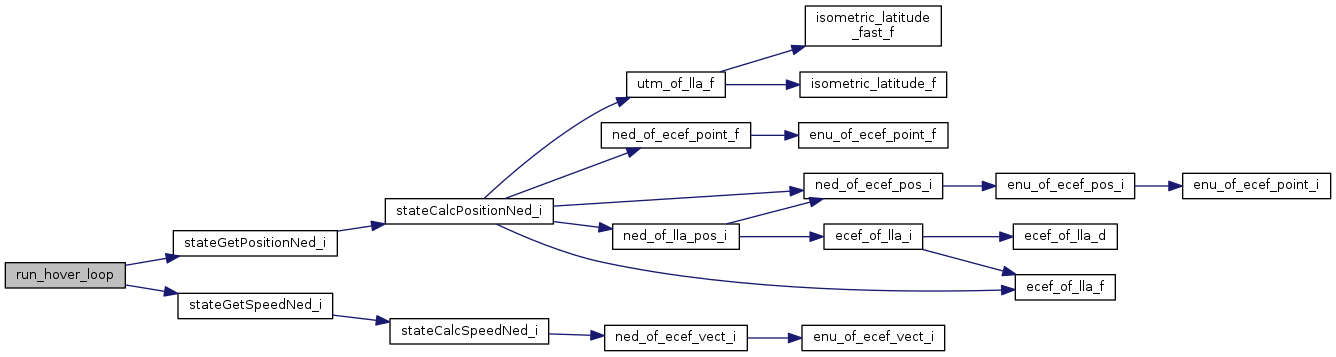
| static void | run_hover_loop (bool in_flight) |
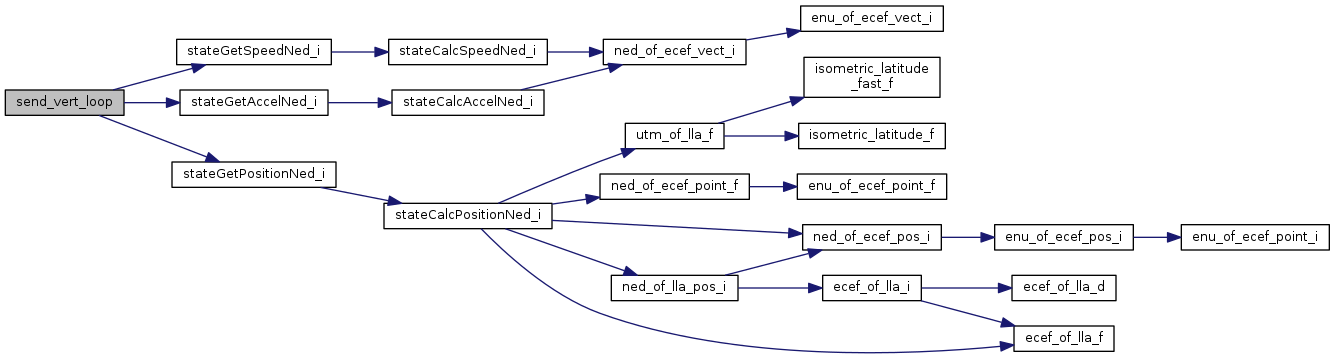
| static void | send_vert_loop (struct transport_tx *trans, struct link_device *dev) |
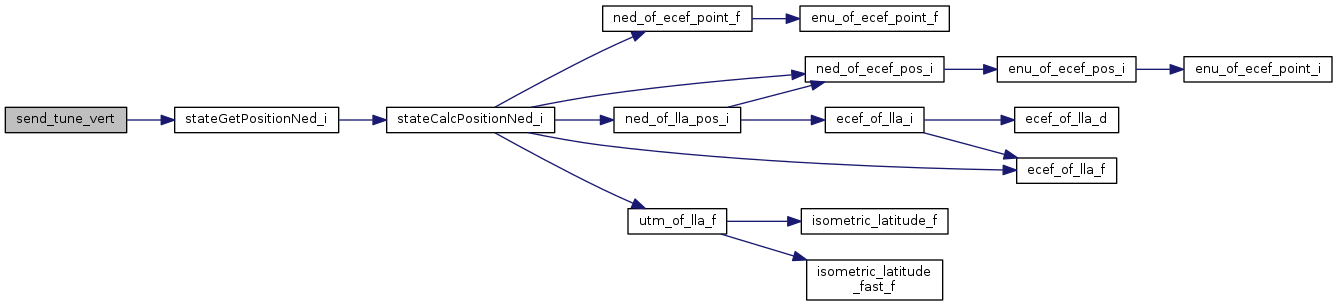
| static void | send_tune_vert (struct transport_tx *trans, struct link_device *dev) |
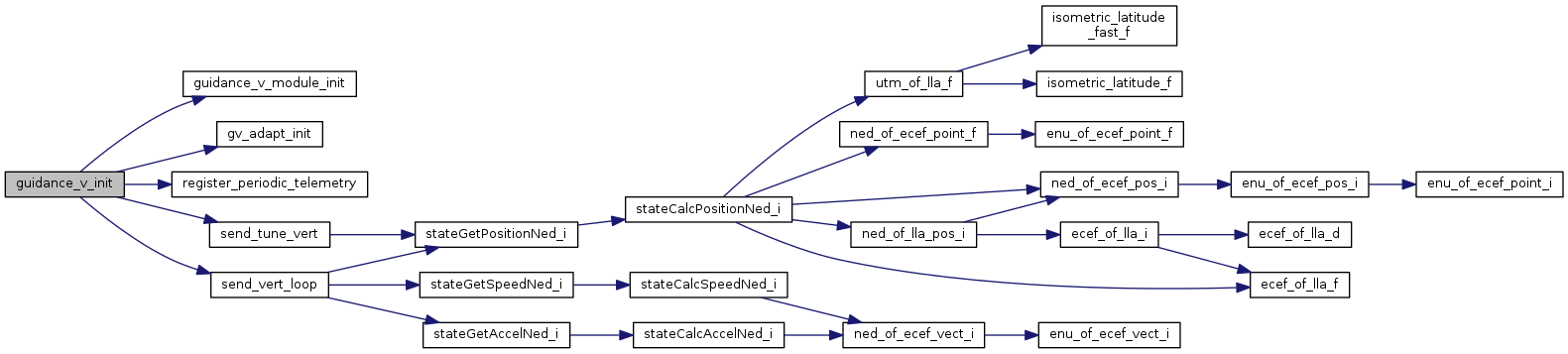
| void | guidance_v_init (void) |
| void | guidance_v_read_rc (void) |
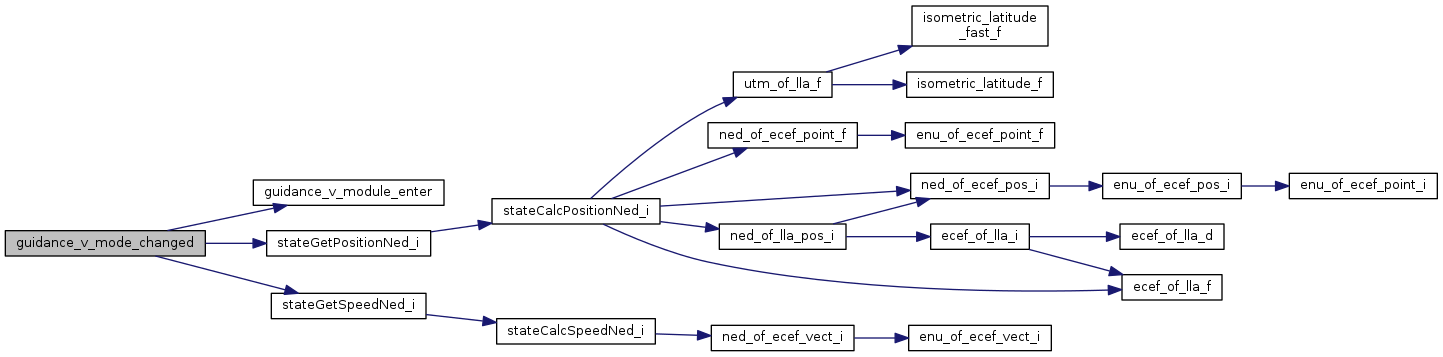
| void | guidance_v_mode_changed (uint8_t new_mode) |
| void | guidance_v_notify_in_flight (bool in_flight) |
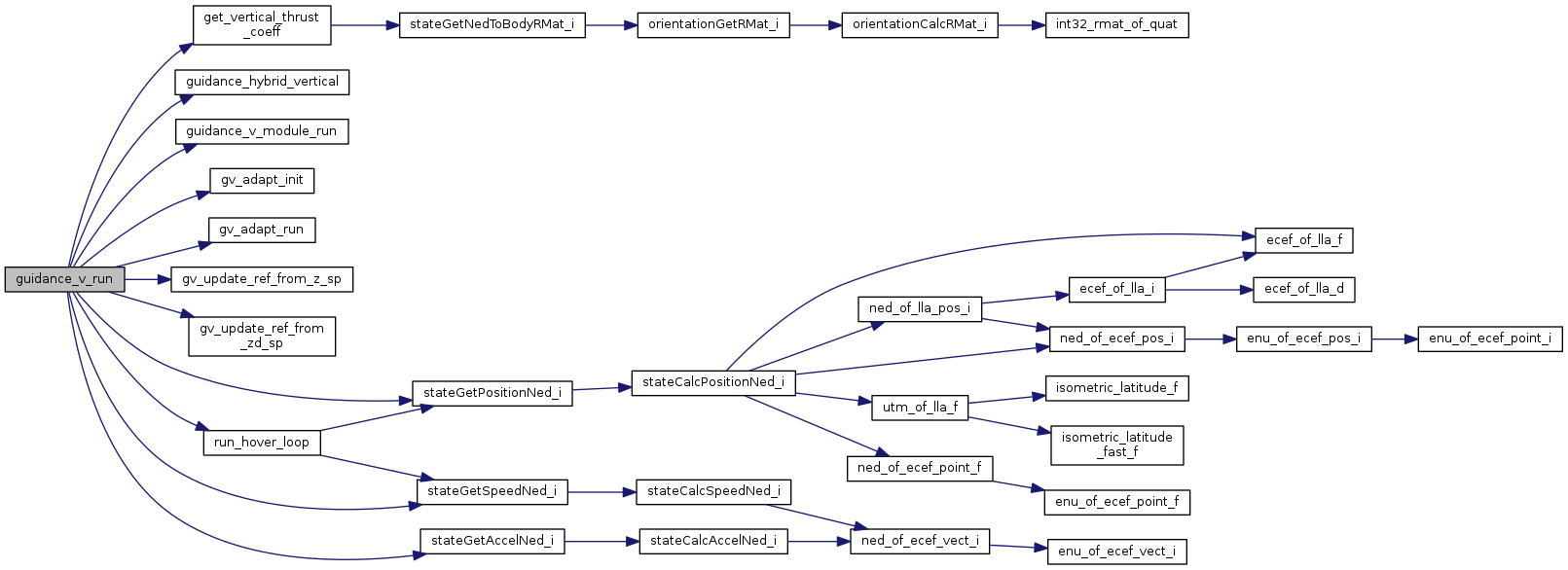
| void | guidance_v_run (bool in_flight) |
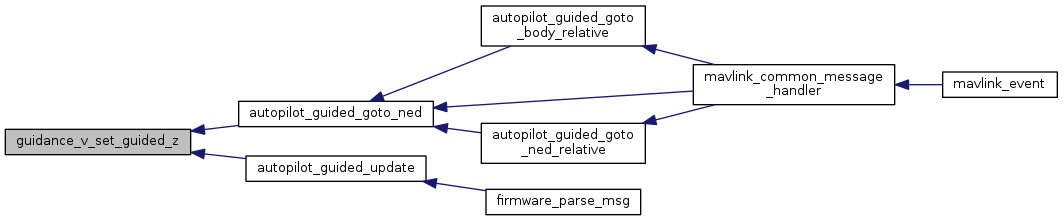
| bool | guidance_v_set_guided_z (float z) |
| Set z setpoint in GUIDED mode. More... | |
| bool | guidance_v_set_guided_vz (float vz) |
| Set z velocity setpoint in GUIDED mode. More... | |
Vertical guidance for rotorcrafts.
Definition in file guidance_v.c.
| #define FF_CMD_FRAC 18 |
Definition at line 420 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_ADAPT_THROTTLE_ENABLED TRUE |
Definition at line 60 of file guidance_v.c.
Referenced by guidance_v_init().
| #define GUIDANCE_V_CLIMB_RC_DEADBAND MAX_PPRZ/10 |
Definition at line 68 of file guidance_v.c.
Referenced by guidance_v_read_rc().
| #define GUIDANCE_V_MAX_ERR_Z POS_BFP_OF_REAL(10.) |
Definition at line 84 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_MAX_ERR_ZD SPEED_BFP_OF_REAL(10.) |
Definition at line 92 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_MAX_RC_CLIMB_SPEED GUIDANCE_V_REF_MIN_ZD |
Definition at line 72 of file guidance_v.c.
Referenced by guidance_v_read_rc().
| #define GUIDANCE_V_MAX_RC_DESCENT_SPEED GUIDANCE_V_REF_MAX_ZD |
Definition at line 76 of file guidance_v.c.
Referenced by guidance_v_read_rc().
| #define GUIDANCE_V_MAX_SUM_ERR 2000000 |
Definition at line 96 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_MIN_ERR_Z POS_BFP_OF_REAL(-10.) |
Definition at line 80 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_MIN_ERR_ZD SPEED_BFP_OF_REAL(-10.) |
Definition at line 88 of file guidance_v.c.
Referenced by run_hover_loop().
| #define GUIDANCE_V_NOMINAL_HOVER_THROTTLE 0.4 |
Definition at line 58 of file guidance_v.c.
Referenced by guidance_v_init().
| #define GuidanceVSetRef | ( | _pos, | |
| _speed, | |||
| _accel | |||
| ) |
Definition at line 134 of file guidance_v.c.
Referenced by guidance_v_mode_changed(), and guidance_v_run().
|
static |
get the cosine of the angle between thrust vector and gravity vector
Definition at line 392 of file guidance_v.c.
References BFP_OF_REAL, INT32_TRIG_FRAC, Int32RMat::m, and stateGetNedToBodyRMat_i().
Referenced by guidance_v_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_v_init | ( | void | ) |
Definition at line 175 of file guidance_v.c.
References DefaultPeriodic, GUIDANCE_V_ADAPT_THROTTLE_ENABLED, GUIDANCE_V_MODE_KILL, guidance_v_module_init(), GUIDANCE_V_NOMINAL_HOVER_THROTTLE, gv_adapt_init(), register_periodic_telemetry(), send_tune_vert(), and send_vert_loop().
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_v_mode_changed | ( | uint8_t | new_mode | ) |
Definition at line 225 of file guidance_v.c.
References GUIDANCE_V_MODE_CLIMB, GUIDANCE_V_MODE_FLIP, GUIDANCE_V_MODE_GUIDED, GUIDANCE_V_MODE_HOVER, GUIDANCE_V_MODE_MODULE, GUIDANCE_V_MODE_NAV, GUIDANCE_V_MODE_RC_CLIMB, guidance_v_module_enter(), GuidanceVSetRef, stateGetPositionNed_i(), stateGetSpeedNed_i(), FloatVect3::z, and NedCoor_i::z.
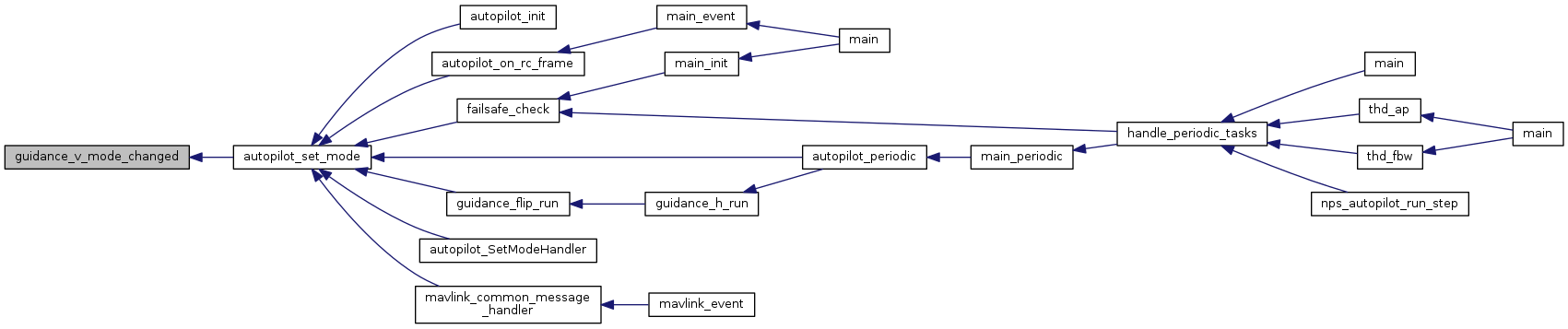
Referenced by autopilot_set_mode().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_v_notify_in_flight | ( | bool | in_flight | ) |
Definition at line 275 of file guidance_v.c.
References gv_adapt_init().
Here is the call graph for this function:| void guidance_v_read_rc | ( | void | ) |
Definition at line 203 of file guidance_v.c.
References GUIDANCE_V_CLIMB_RC_DEADBAND, GUIDANCE_V_MAX_RC_CLIMB_SPEED, GUIDANCE_V_MAX_RC_DESCENT_SPEED, MAX_PPRZ, radio_control, RADIO_THROTTLE, SPEED_BFP_OF_REAL, and RadioControl::values.
Referenced by autopilot_on_rc_frame().
Here is the caller graph for this function:| void guidance_v_run | ( | bool | in_flight | ) |
Definition at line 283 of file guidance_v.c.
References get_vertical_thrust_coeff(), guidance_hybrid_vertical(), guidance_v_delta_t, GUIDANCE_V_MODE_CLIMB, GUIDANCE_V_MODE_FLIP, GUIDANCE_V_MODE_GUIDED, GUIDANCE_V_MODE_HOVER, GUIDANCE_V_MODE_MODULE, GUIDANCE_V_MODE_NAV, GUIDANCE_V_MODE_RC_CLIMB, GUIDANCE_V_MODE_RC_DIRECT, guidance_v_module_run(), guidance_v_rc_delta_t, guidance_v_rc_zd_sp, guidance_v_thrust_coeff, guidance_v_z_ref, GuidanceVSetRef, gv_adapt_init(), gv_adapt_run(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), INT32_TRIG_FRAC, Min, nav_climb, nav_flight_altitude, nav_throttle, radio_control, RC_OK, run_hover_loop(), stabilization_cmd, stateGetAccelNed_i(), stateGetPositionNed_i(), stateGetSpeedNed_i(), RadioControl::status, vertical_mode, VERTICAL_MODE_ALT, VERTICAL_MODE_CLIMB, VERTICAL_MODE_MANUAL, FloatVect3::z, and NedCoor_i::z.
Referenced by autopilot_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| bool guidance_v_set_guided_vz | ( | float | vz | ) |
Set z velocity setpoint in GUIDED mode.
| vz | Setpoint (down is positive) in meters/second. |
Definition at line 491 of file guidance_v.c.
References GUIDANCE_V_MODE_GUIDED, and SPEED_BFP_OF_REAL.
Referenced by autopilot_guided_move_ned(), and autopilot_guided_update().
Here is the caller graph for this function:| bool guidance_v_set_guided_z | ( | float | z | ) |
Set z setpoint in GUIDED mode.
| z | Setpoint (down is positive) in meters. |
Definition at line 481 of file guidance_v.c.
References GUIDANCE_V_MODE_GUIDED, and POS_BFP_OF_REAL.
Referenced by autopilot_guided_goto_ned(), and autopilot_guided_update().
Here is the caller graph for this function:
|
static |
Definition at line 422 of file guidance_v.c.
References BFP_OF_REAL, FF_CMD_FRAC, guidance_v_fb_cmd, GUIDANCE_V_MAX_ERR_Z, GUIDANCE_V_MAX_ERR_ZD, GUIDANCE_V_MAX_SUM_ERR, GUIDANCE_V_MIN_ERR_Z, GUIDANCE_V_MIN_ERR_ZD, guidance_v_z_sum_err, gv_adapt_X, GV_ADAPT_X_FRAC, gv_z_ref, GV_Z_REF_FRAC, gv_zd_ref, GV_ZD_REF_FRAC, gv_zdd_ref, GV_ZDD_REF_FRAC, INT32_ACCEL_FRAC, INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_TRIG_FRAC, MAX_PPRZ, stateGetPositionNed_i(), stateGetSpeedNed_i(), and NedCoor_i::z.
Referenced by guidance_v_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 165 of file guidance_v.c.
References stateGetPositionNed_i(), and FloatVect3::z.
Referenced by guidance_v_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 147 of file guidance_v.c.
References gv_adapt_P, gv_adapt_X, gv_adapt_Xmeas, stateGetAccelNed_i(), stateGetPositionNed_i(), stateGetSpeedNed_i(), and FloatVect3::z.
Referenced by guidance_v_init().
Here is the call graph for this function: Here is the caller graph for this function:| bool guidance_v_adapt_throttle_enabled |
Use adaptive throttle command estimation.
Definition at line 105 of file guidance_v.c.
| int32_t guidance_v_delta_t |
thrust command.
summation of feed-forward and feed-back commands, valid range 0 : MAX_PPRZ
Definition at line 102 of file guidance_v.c.
Referenced by guidance_hybrid_vertical(), and guidance_v_run().
| int32_t guidance_v_fb_cmd |
| int32_t guidance_v_ff_cmd |
feed-forward command
Definition at line 100 of file guidance_v.c.
| bool guidance_v_guided_vel_enabled |
Definition at line 106 of file guidance_v.c.
| int32_t guidance_v_kd |
vertical control D-gain
Definition at line 126 of file guidance_v.c.
Referenced by guidance_hybrid_vertical().
| int32_t guidance_v_ki |
vertical control I-gain
Definition at line 127 of file guidance_v.c.
Referenced by guidance_hybrid_vertical().
| int32_t guidance_v_kp |
vertical control P-gain
Definition at line 125 of file guidance_v.c.
Referenced by guidance_hybrid_vertical().
| uint8_t guidance_v_mode |
Definition at line 99 of file guidance_v.c.
Referenced by booz_fms_impl_periodic(), and send_status().
| float guidance_v_nominal_throttle |
nominal throttle for hover.
This is only used if GUIDANCE_V_NOMINAL_HOVER_THROTTLE is defined! Unit: factor of MAX_PPRZ with range 0.1 : 0.9
Definition at line 104 of file guidance_v.c.
Referenced by guidance_hybrid_vertical().
| int32_t guidance_v_rc_delta_t |
Direct throttle from radio control.
range 0:MAX_PPRZ
Definition at line 111 of file guidance_v.c.
Referenced by guidance_v_run().
| int32_t guidance_v_rc_zd_sp |
Vertical speed setpoint from radio control.
fixed point representation: Q12.19 accuracy 0.0000019, range +/-4096
Definition at line 117 of file guidance_v.c.
Referenced by guidance_v_run().
| int32_t guidance_v_thrust_coeff |
Definition at line 131 of file guidance_v.c.
Referenced by guidance_h_traj_run(), and guidance_v_run().
| int32_t guidance_v_z_ref |
altitude reference in meters.
fixed point representation: Q23.8 accuracy 0.0039, range 8388km
Definition at line 121 of file guidance_v.c.
Referenced by gps_sim_hitl_event(), guidance_indi_run(), and guidance_v_run().
| int32_t guidance_v_z_sp |
altitude setpoint in meters (input).
fixed point representation: Q23.8 accuracy 0.0039, range 8388km
Definition at line 119 of file guidance_v.c.
Referenced by send_fp().
| int32_t guidance_v_z_sum_err |
| int32_t guidance_v_zd_ref |
vertical speed reference in meter/s.
fixed point representation: Q12.19 accuracy 0.0000038, range 4096
Definition at line 122 of file guidance_v.c.
Referenced by gps_sim_hitl_event().
| int32_t guidance_v_zd_sp |
vertical speed setpoint in meter/s (input).
fixed point representation: Q12.19 accuracy 0.0000019, range +/-4096
Definition at line 120 of file guidance_v.c.
Referenced by autopilot_set_mode().
| int32_t guidance_v_zdd_ref |
vertical acceleration reference in meter/s^2.
fixed point representation: Q21.10 accuracy 0.0009766, range 2097152
Definition at line 123 of file guidance_v.c.
Referenced by gps_sim_hitl_event().
 1.8.8
1.8.8