|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
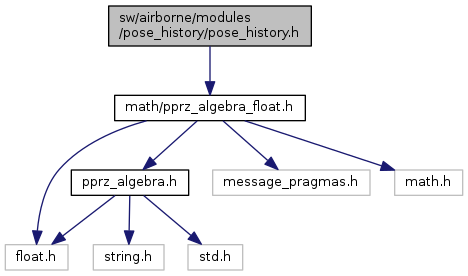
#include "math/pprz_algebra_float.h" Include dependency graph for pose_history.h: This graph shows which files directly or indirectly include this file:
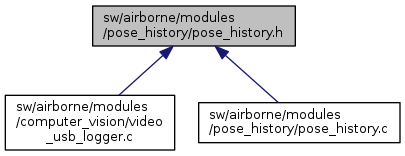
Include dependency graph for pose_history.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | pose_t |
Functions | |
| void | pose_init (void) |
| Initialises the pose history. More... | |
| void | pose_periodic (void) |
| Records the pose history 512 times per second. More... | |
| struct pose_t | get_rotation_at_timestamp (uint32_t timestamp) |
| Given a pprz timestamp in used (obtained with get_sys_time_usec) we return the pose in FloatEulers closest to that time. More... | |
Definition in file pose_history.h.
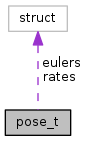
| struct pose_t |
Definition at line 31 of file pose_history.h.
Collaboration diagram for pose_t:| Data Fields | ||
|---|---|---|
| struct FloatEulers | eulers | |
| struct FloatRates | rates | |
| uint32_t | timestamp | |
Given a pprz timestamp in used (obtained with get_sys_time_usec) we return the pose in FloatEulers closest to that time.
Definition at line 53 of file pose_history.c.
References pose_t::eulers, location_history, pose_t::rates, rotation_history_ring_buffer_t::ring_data, rotation_history_ring_buffer_t::ring_size, and pose_t::timestamp.
Referenced by opticflow_module_calc(), and save_shot_on_disk().
Here is the caller graph for this function:| void pose_init | ( | void | ) |
Initialises the pose history.
Definition at line 85 of file pose_history.c.
References location_history, POSE_HISTORY_SIZE, rotation_history_ring_buffer_t::ring_index, and rotation_history_ring_buffer_t::ring_size.
| void pose_periodic | ( | void | ) |
Records the pose history 512 times per second.
Time gets saved in pprz usec, obtained with get_sys_time_usec();
Definition at line 95 of file pose_history.c.
References pose_t::eulers, get_sys_time_usec(), location_history, pose_t::rates, rotation_history_ring_buffer_t::ring_data, rotation_history_ring_buffer_t::ring_index, rotation_history_ring_buffer_t::ring_size, stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), and pose_t::timestamp.
Here is the call graph for this function: 1.8.8
1.8.8