|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Float Algebra:
Collaboration diagram for Float Algebra:Data Structures | |
| struct | FloatVect2 |
| struct | FloatVect3 |
| struct | FloatQuat |
| Roation quaternion. More... | |
| struct | FloatMat33 |
| struct | FloatRMat |
| rotation matrix More... | |
| struct | FloatEulers |
| euler angles More... | |
| struct | FloatRates |
| angular rates More... | |
Macros | |
| #define | M_SQRT2 1.41421356237309504880 |
| #define | FLOAT_ANGLE_NORMALIZE(_a) |
| #define | FLOAT_VECT2_ZERO(_v) VECT2_ASSIGN(_v, 0., 0.) |
| #define | FLOAT_VECT2_NORM(_v) sqrtf(VECT2_NORM2(_v)) |
| #define | FLOAT_VECT2_NORMALIZE(_v) float_vect2_normalize(&(_v)) |
| #define | FLOAT_VECT3_ZERO(_v) VECT3_ASSIGN(_v, 0., 0., 0.) |
| #define | FLOAT_VECT3_NORM(_v) sqrtf(VECT3_NORM2(_v)) |
| #define | FLOAT_VECT3_NORMALIZE(_v) float_vect3_normalize(&(_v)) |
| #define | FLOAT_RATES_ZERO(_r) |
| #define | FLOAT_RATES_NORM(_v) (sqrtf((_v).p*(_v).p + (_v).q*(_v).q + (_v).r*(_v).r)) |
| #define | FLOAT_RATES_LIN_CMB(_ro, _r1, _s1, _r2, _s2) |
| #define | FLOAT_VECT3_INTEGRATE_FI(_vo, _dv, _dt) WARNING("FLOAT_VECT3_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_vect3_integrate_fi(&(_vo), &(_dv), _dt) |
| #define | FLOAT_RATES_INTEGRATE_FI(_ra, _racc, _dt) WARNING("FLOAT_RATES_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_rates_integrate_fi(&(_ra), &(_racc), _dt) |
| #define | FLOAT_RATES_OF_EULER_DOT(_ra, _e, _ed) WARNING("FLOAT_RATES_OF_EULER_DOT macro is deprecated, use the lower case function instead") float_rates_of_euler_dot(&(_ra), &(_e), &(_ed)) |
| #define | FLOAT_MAT33_ZERO(_m) |
| #define | FLOAT_MAT33_DIAG(_m, _d00, _d11, _d22) |
| #define | float_rmat_of_eulers float_rmat_of_eulers_321 |
| #define | FLOAT_RMAT_INV(_m_b2a, _m_a2b) WARNING("FLOAT_RMAT_INV macro is deprecated, use the lower case function instead") float_rmat_inv(&(_m_b2a), &(_m_a2b)) |
| #define | FLOAT_RMAT_NORM(_m) WARNING("FLOAT_RMAT_NORM macro is deprecated, use the lower case function instead") float_rmat_norm(&(_m)) |
| #define | FLOAT_RMAT_COMP(_m_a2c, _m_a2b, _m_b2c) WARNING("FLOAT_RMAT_COMP macro is deprecated, use the lower case function instead") float_rmat_comp(&(_m_a2c), &(_m_a2b), &(_m_b2c)) |
| #define | FLOAT_RMAT_COMP_INV(_m_a2b, _m_a2c, _m_b2c) WARNING("FLOAT_RMAT_COMP_INV macro is deprecated, use the lower case function instead") float_rmat_comp_inv(&(_m_a2b), &(_m_a2c), &(_m_b2c)) |
| #define | FLOAT_RMAT_VMULT(_vb, _m_a2b, _va) WARNING("FLOAT_RMAT_VMULT macro is deprecated, use the lower case function instead") float_rmat_vmult(&(_vb), &(_m_a2b), &(_va)) |
| #define | FLOAT_RMAT_TRANSP_VMULT(_vb, _m_b2a, _va) WARNING("FLOAT_RMAT_TRANSP_VMULT macro is deprecated, use the lower case function instead") float_rmat_transp_vmult(&(_vb), &(_m_b2a), &(_va)) |
| #define | FLOAT_RMAT_RATEMULT(_rb, _m_a2b, _ra) WARNING("FLOAT_RMAT_RATEMULT macro is deprecated, use the lower case function instead") float_rmat_ratemult(&(_rb), &(_m_a2b), &(_ra)) |
| #define | FLOAT_RMAT_TRANSP_RATEMULT(_rb, _m_b2a, _ra) WARNING("FLOAT_RMAT_TRANSP_RATEMULT macro is deprecated, use the lower case function instead") float_rmat_ratemult(&(_rb), &(_m_b2a), &(_ra)) |
| #define | FLOAT_RMAT_OF_AXIS_ANGLE(_rm, _uv, _an) WARNING("FLOAT_RMAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") float_rmat_of_axis_angle(&(_rm), &(_uv), _an) |
| #define | FLOAT_RMAT_OF_EULERS(_rm, _e) WARNING("FLOAT_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") float_rmat_of_eulers_321(&(_rm), &(_e)) |
| #define | FLOAT_RMAT_OF_EULERS_321(_rm, _e) WARNING("FLOAT_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") float_rmat_of_eulers_321(&(_rm), &(_e)) |
| #define | FLOAT_RMAT_OF_EULERS_312(_rm, _e) WARNING("FLOAT_RMAT_OF_EULERS_312 macro is deprecated, use the lower case function instead") float_rmat_of_eulers_312(&(_rm), &(_e)) |
| #define | FLOAT_RMAT_OF_QUAT(_rm, _q) WARNING("FLOAT_RMAT_OF_QUAT macro is deprecated, use the lower case function instead") float_rmat_of_quat(&(_rm), &(_q)) |
| #define | FLOAT_RMAT_INTEGRATE_FI(_rm, _omega, _dt) WARNING("FLOAT_RMAT_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_rmat_integrate_fi(&(_rm), &(_omega), &(_dt)) |
| #define | FLOAT_QUAT_NORM2(_q) (SQUARE((_q).qi) + SQUARE((_q).qx) + SQUARE((_q).qy) + SQUARE((_q).qz)) |
| #define | FLOAT_QUAT_EXTRACT(_vo, _qi) QUAT_EXTRACT_Q(_vo, _qi) |
| #define | FLOAT_QUAT_ZERO(_q) WARNING("FLOAT_QUAT_ZERO macro is deprecated, use the lower case function instead") float_quat_identity(&(_q)) |
| #define | FLOAT_QUAT_INVERT(_qo, _qi) WARNING("FLOAT_QUAT_INVERT macro is deprecated, use the lower case function instead") float_quat_invert(&(_qo), &(_qi)) |
| #define | FLOAT_QUAT_WRAP_SHORTEST(_q) WARNING("FLOAT_QUAT_WRAP_SHORTEST macro is deprecated, use the lower case function instead") float_quat_wrap_shortest(&(_q)) |
| #define | FLOAT_QUAT_NORM(_q) WARNING("FLOAT_QUAT_NORM macro is deprecated, use the lower case function instead") float_quat_norm(&(_q)) |
| #define | FLOAT_QUAT_NORMALIZE(_q) WARNING("FLOAT_QUAT_NORMALIZE macro is deprecated, use the lower case function instead") float_quat_normalize(&(_q)) |
| #define | FLOAT_QUAT_COMP(_a2c, _a2b, _b2c) WARNING("FLOAT_QUAT_COMP macro is deprecated, use the lower case function instead") float_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
| #define | FLOAT_QUAT_MULT(_a2c, _a2b, _b2c) WARNING("FLOAT_QUAT_MULT macro is deprecated, use the lower case function instead") float_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
| #define | FLOAT_QUAT_INV_COMP(_b2c, _a2b, _a2c) WARNING("FLOAT_QUAT_INV_COMP macro is deprecated, use the lower case function instead") float_quat_inv_comp(&(_b2c), &(_a2b), &(_a2c)) |
| #define | FLOAT_QUAT_COMP_INV(_a2b, _a2c, _b2c) WARNING("FLOAT_QUAT_COMP_INV macro is deprecated, use the lower case function instead") float_quat_comp_inv(&(_a2b), &(_a2c), &(_b2c)) |
| #define | FLOAT_QUAT_COMP_NORM_SHORTEST(_a2c, _a2b, _b2c) WARNING("FLOAT_QUAT_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_comp_norm_shortest(&(_a2c), &(_a2b), &(_b2c)) |
| #define | FLOAT_QUAT_COMP_INV_NORM_SHORTEST(_a2b, _a2c, _b2c) WARNING("FLOAT_QUAT_COMP_INV_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_comp_inv_norm_shortest(&(_a2b), &(_a2c), &(_b2c)) |
| #define | FLOAT_QUAT_INV_COMP_NORM_SHORTEST(_b2c, _a2b, _a2c) WARNING("FLOAT_QUAT_INV_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_inv_comp_norm_shortest(&(_b2c), &(_a2b), &(_a2c)) |
| #define | FLOAT_QUAT_DIFFERENTIAL(q_out, w, dt) WARNING("FLOAT_QUAT_DIFFERENTIAL macro is deprecated, use the lower case function instead") float_quat_differential(&(q_out), &(w), dt) |
| #define | FLOAT_QUAT_INTEGRATE(_q, _omega, _dt) WARNING("FLOAT_QUAT_INTEGRATE macro is deprecated, use the lower case function instead") float_quat_integrate(&(_q), &(_omega), _dt) |
| #define | FLOAT_QUAT_VMULT(v_out, q, v_in) WARNING("FLOAT_QUAT_VMULT macro is deprecated, use the lower case function instead") float_quat_vmult(&(v_out), &(q), &(v_in)) |
| #define | FLOAT_QUAT_DERIVATIVE(_qd, _r, _q) WARNING("FLOAT_QUAT_DERIVATIVE macro is deprecated, use the lower case function instead") float_quat_derivative(&(_qd), &(_r), &(_q)) |
| #define | FLOAT_QUAT_DERIVATIVE_LAGRANGE(_qd, _r, _q) WARNING("FLOAT_QUAT_DERIVATIVE_LAGRANGE macro is deprecated, use the lower case function instead") float_quat_derivative_lagrange(&(_qd), &(_r), &(_q)) |
| #define | FLOAT_QUAT_OF_EULERS(_q, _e) WARNING("FLOAT_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") float_quat_of_eulers(&(_q), &(_e)) |
| #define | FLOAT_QUAT_OF_AXIS_ANGLE(_q, _uv, _an) WARNING("FLOAT_QUAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") float_quat_of_axis_angle(&(_q), &(_uv), _an) |
| #define | FLOAT_QUAT_OF_ORIENTATION_VECT(_q, _ov) WARNING("FLOAT_QUAT_OF_ORIENTATION_VECT macro is deprecated, use the lower case function instead") float_quat_of_orientation_vect(&(_q), &(_ov)) |
| #define | FLOAT_QUAT_OF_RMAT(_q, _r) WARNING("FLOAT_QUAT_OF_RMAT macro is deprecated, use the lower case function instead") float_quat_of_rmat(&(_q), &(_r)) |
| #define | FLOAT_EULERS_ZERO(_e) EULERS_ASSIGN(_e, 0., 0., 0.); |
| #define | FLOAT_EULERS_OF_RMAT(_e, _rm) WARNING("FLOAT_EULERS_OF_RMAT macro is deprecated, use the lower case function instead") float_eulers_of_rmat(&(_e), &(_rm)) |
| #define | FLOAT_EULERS_OF_QUAT(_e, _q) WARNING("FLOAT_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") float_eulers_of_quat(&(_e), &(_q)) |
| #define | FLOAT_EULERS_NORM(_e) WARNING("FLOAT_EULERS_NORM macro is deprecated, use the lower case function instead") float_eulers_norm(&(_e)) |
| #define | MAKE_MATRIX_PTR(_ptr, _mat, _rows) |
| Make a pointer to a matrix of _rows lines. More... | |
Functions | |
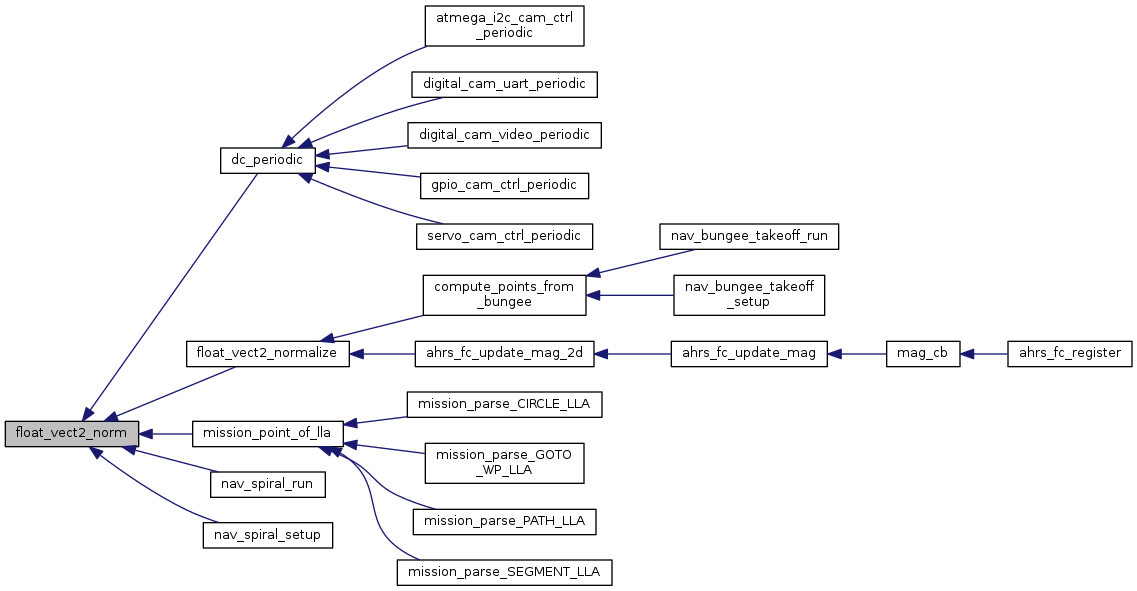
| static float | float_vect2_norm2 (struct FloatVect2 *v) |
| static float | float_vect2_norm (struct FloatVect2 *v) |
| static void | float_vect2_normalize (struct FloatVect2 *v) |
| normalize 2D vector in place More... | |
| static float | float_vect3_norm2 (struct FloatVect3 *v) |
| static float | float_vect3_norm (struct FloatVect3 *v) |
| static void | float_vect3_normalize (struct FloatVect3 *v) |
| normalize 3D vector in place More... | |
| void | float_vect3_integrate_fi (struct FloatVect3 *vec, struct FloatVect3 *dv, float dt) |
| in place first order integration of a 3D-vector More... | |
| void | float_rates_integrate_fi (struct FloatRates *r, struct FloatRates *dr, float dt) |
| in place first order integration of angular rates More... | |
| void | float_rates_of_euler_dot (struct FloatRates *r, struct FloatEulers *e, struct FloatEulers *edot) |
| static void | float_rmat_identity (struct FloatRMat *rm) |
| initialises a rotation matrix to identity More... | |
| void | float_rmat_inv (struct FloatRMat *m_b2a, struct FloatRMat *m_a2b) |
| Inverse/transpose of a rotation matrix. More... | |
| void | float_rmat_comp (struct FloatRMat *m_a2c, struct FloatRMat *m_a2b, struct FloatRMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. More... | |
| void | float_rmat_comp_inv (struct FloatRMat *m_a2b, struct FloatRMat *m_a2c, struct FloatRMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. More... | |
| float | float_rmat_norm (struct FloatRMat *rm) |
| Norm of a rotation matrix. More... | |
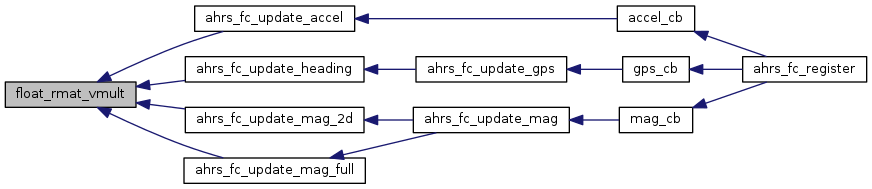
| void | float_rmat_vmult (struct FloatVect3 *vb, struct FloatRMat *m_a2b, struct FloatVect3 *va) |
| rotate 3D vector by rotation matrix. More... | |
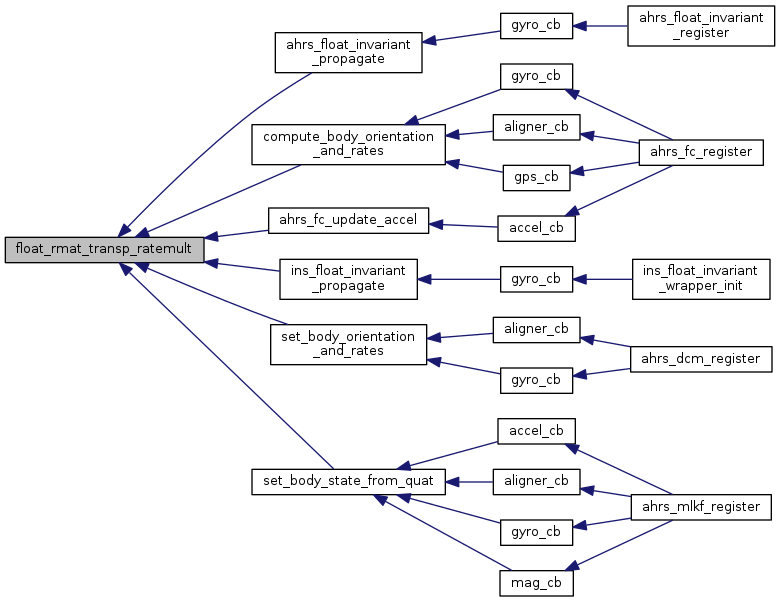
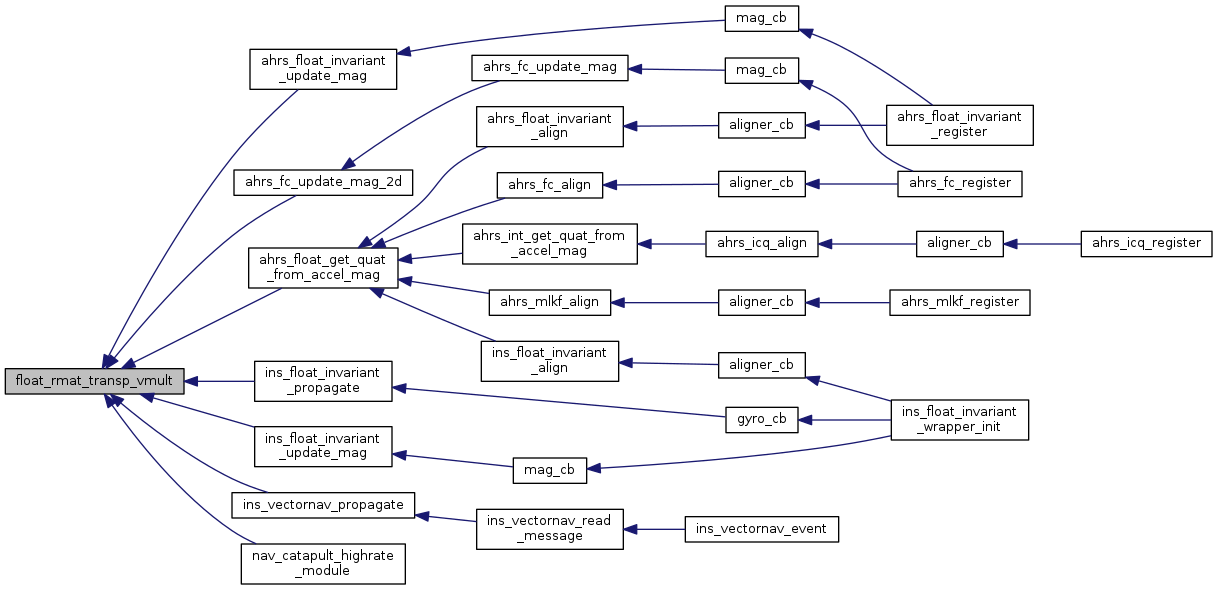
| void | float_rmat_transp_vmult (struct FloatVect3 *vb, struct FloatRMat *m_b2a, struct FloatVect3 *va) |
| rotate 3D vector by transposed rotation matrix. More... | |
| void | float_rmat_ratemult (struct FloatRates *rb, struct FloatRMat *m_a2b, struct FloatRates *ra) |
| rotate anglular rates by rotation matrix. More... | |
| void | float_rmat_transp_ratemult (struct FloatRates *rb, struct FloatRMat *m_b2a, struct FloatRates *ra) |
| rotate anglular rates by transposed rotation matrix. More... | |
| void | float_rmat_of_axis_angle (struct FloatRMat *rm, struct FloatVect3 *uv, float angle) |
| initialises a rotation matrix from unit vector axis and angle More... | |
| void | float_rmat_of_eulers_321 (struct FloatRMat *rm, struct FloatEulers *e) |
| Rotation matrix from 321 Euler angles (float). More... | |
| void | float_rmat_of_eulers_312 (struct FloatRMat *rm, struct FloatEulers *e) |
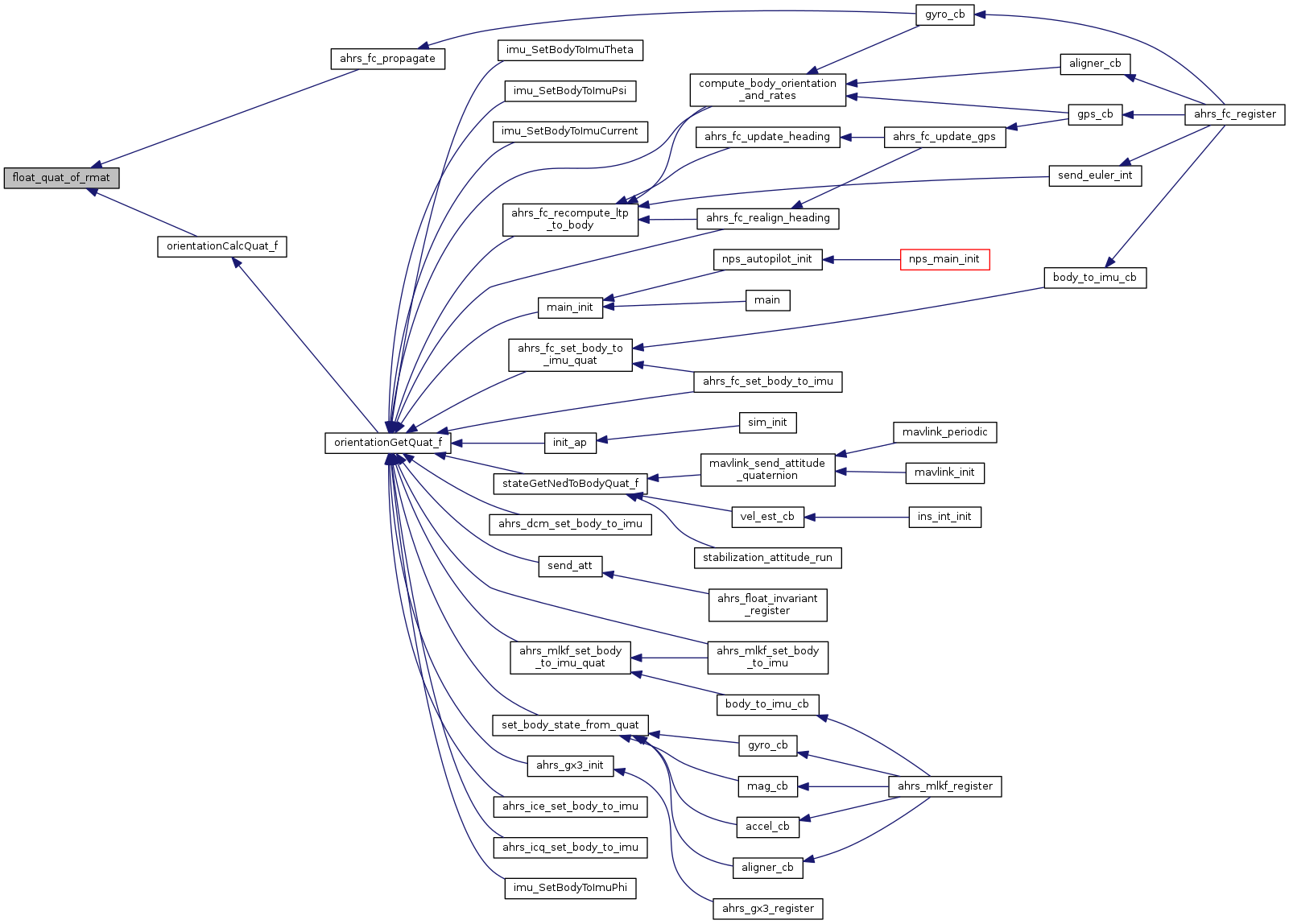
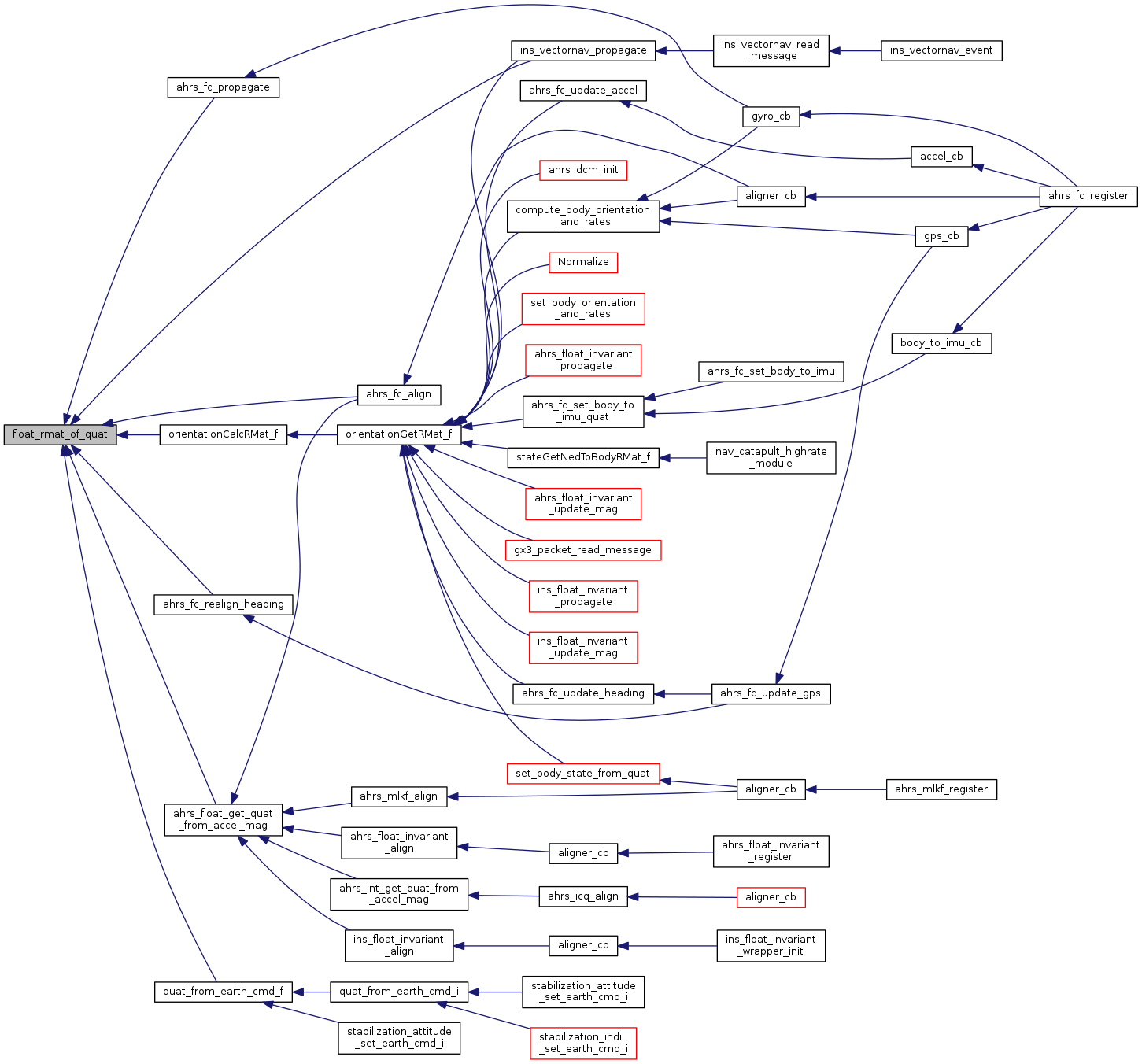
| void | float_rmat_of_quat (struct FloatRMat *rm, struct FloatQuat *q) |
| void | float_rmat_integrate_fi (struct FloatRMat *rm, struct FloatRates *omega, float dt) |
| in place first order integration of a rotation matrix More... | |
| float | float_rmat_reorthogonalize (struct FloatRMat *rm) |
| static void | float_quat_identity (struct FloatQuat *q) |
| initialises a quaternion to identity More... | |
| static float | float_quat_norm (struct FloatQuat *q) |
| static void | float_quat_normalize (struct FloatQuat *q) |
| static void | float_quat_invert (struct FloatQuat *qo, struct FloatQuat *qi) |
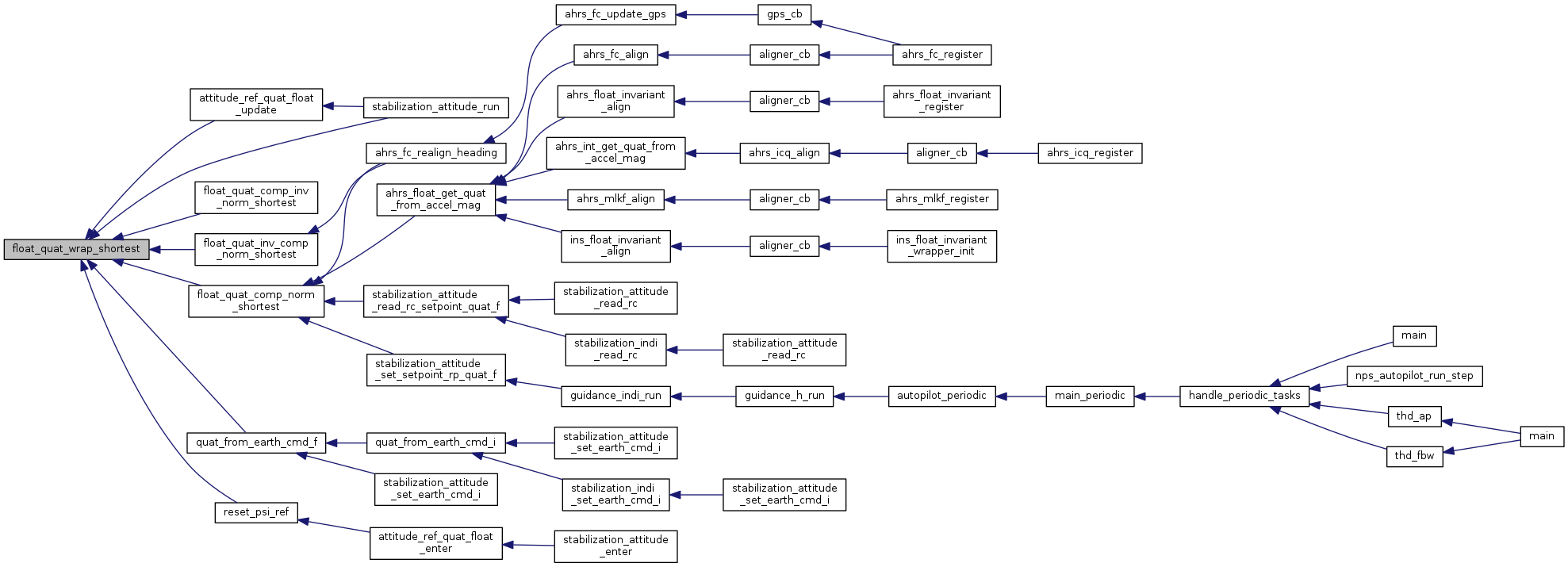
| static void | float_quat_wrap_shortest (struct FloatQuat *q) |
| void | float_quat_comp (struct FloatQuat *a2c, struct FloatQuat *a2b, struct FloatQuat *b2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | float_quat_comp_inv (struct FloatQuat *a2b, struct FloatQuat *a2c, struct FloatQuat *b2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | float_quat_inv_comp (struct FloatQuat *b2c, struct FloatQuat *a2b, struct FloatQuat *a2c) |
| Composition (multiplication) of two quaternions. More... | |
| void | float_quat_comp_norm_shortest (struct FloatQuat *a2c, struct FloatQuat *a2b, struct FloatQuat *b2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | float_quat_comp_inv_norm_shortest (struct FloatQuat *a2b, struct FloatQuat *a2c, struct FloatQuat *b2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | float_quat_inv_comp_norm_shortest (struct FloatQuat *b2c, struct FloatQuat *a2b, struct FloatQuat *a2c) |
| Composition (multiplication) of two quaternions with normalization. More... | |
| void | float_quat_derivative (struct FloatQuat *qd, struct FloatRates *r, struct FloatQuat *q) |
| Quaternion derivative from rotational velocity. More... | |
| void | float_quat_derivative_lagrange (struct FloatQuat *qd, struct FloatRates *r, struct FloatQuat *q) |
| Quaternion derivative from rotational velocity with Lagrange multiplier. More... | |
| void | float_quat_differential (struct FloatQuat *q_out, struct FloatRates *w, float dt) |
| Delta rotation quaternion with constant angular rates. More... | |
| void | float_quat_integrate_fi (struct FloatQuat *q, struct FloatRates *omega, float dt) |
| in place first order quaternion integration with constant rotational velocity More... | |
| void | float_quat_integrate (struct FloatQuat *q, struct FloatRates *omega, float dt) |
| in place quaternion integration with constant rotational velocity More... | |
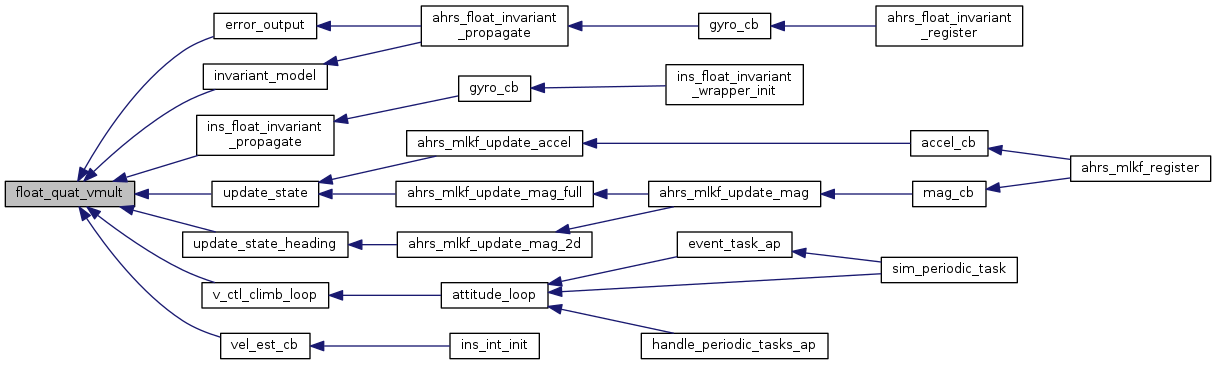
| void | float_quat_vmult (struct FloatVect3 *v_out, struct FloatQuat *q, const struct FloatVect3 *v_in) |
| rotate 3D vector by quaternion. More... | |
| void | float_quat_of_eulers (struct FloatQuat *q, struct FloatEulers *e) |
| Quaternion from Euler angles. More... | |
| void | float_quat_of_axis_angle (struct FloatQuat *q, const struct FloatVect3 *uv, float angle) |
| Quaternion from unit vector and angle. More... | |
| void | float_quat_of_orientation_vect (struct FloatQuat *q, const struct FloatVect3 *ov) |
| Quaternion from orientation vector. More... | |
| void | float_quat_of_rmat (struct FloatQuat *q, struct FloatRMat *rm) |
| Quaternion from rotation matrix. More... | |
| static float | float_eulers_norm (struct FloatEulers *e) |
| void | float_eulers_of_rmat (struct FloatEulers *e, struct FloatRMat *rm) |
| void | float_eulers_of_quat (struct FloatEulers *e, struct FloatQuat *q) |
| static void | float_vect_zero (float *a, const int n) |
| a = 0 More... | |
| static void | float_vect_copy (float *a, const float *b, const int n) |
| a = b More... | |
| static void | float_vect_sum (float *o, const float *a, const float *b, const int n) |
| o = a + b More... | |
| static void | float_vect_diff (float *o, const float *a, const float *b, const int n) |
| o = a - b More... | |
| static void | float_vect_mul (float *o, const float *a, const float *b, const int n) |
| o = a * b (element wise) More... | |
| static void | float_vect_add (float *a, const float *b, const int n) |
| a += b More... | |
| static void | float_vect_sub (float *a, const float *b, const int n) |
| a -= b More... | |
| static void | float_vect_smul (float *o, const float *a, const float s, const int n) |
| o = a * s More... | |
| static void | float_vect_sdiv (float *o, const float *a, const float s, const int n) |
| o = a / s More... | |
| static float | float_vect_norm (const float *a, const int n) |
| ||a|| More... | |
| static void | float_mat_zero (float **a, int m, int n) |
| a = 0 More... | |
| static void | float_mat_copy (float **a, float **b, int m, int n) |
| a = b More... | |
| static void | float_mat_sum (float **o, float **a, float **b, int m, int n) |
| o = a + b More... | |
| static void | float_mat_diff (float **o, float **a, float **b, int m, int n) |
| o = a - b More... | |
| static void | float_mat_transpose (float **a, int n) |
| transpose square matrix More... | |
| static void | float_mat_mul (float **o, float **a, float **b, int m, int n, int l) |
| o = a * b More... | |
| static void | float_mat_minor (float **o, float **a, int m, int n, int d) |
| matrix minor More... | |
| static void | float_mat_vmul (float **o, float *v, int n) |
| o = I - v v^T More... | |
| static void | float_mat_col (float *o, float **a, int m, int c) |
| o = c-th column of matrix a[m x n] More... | |
| struct FloatVect2 |
Definition at line 49 of file pprz_algebra_float.h.
| Data Fields | ||
|---|---|---|
| float | x | |
| float | y | |
| struct FloatVect3 |
Definition at line 54 of file pprz_algebra_float.h.
| Data Fields | ||
|---|---|---|
| float | x | |
| float | y | |
| float | z | |
| struct FloatQuat |
Roation quaternion.
Definition at line 63 of file pprz_algebra_float.h.
| Data Fields | ||
|---|---|---|
| float | qi | |
| float | qx | |
| float | qy | |
| float | qz | |
| struct FloatMat33 |
Definition at line 70 of file pprz_algebra_float.h.
| Data Fields | ||
|---|---|---|
| float | m[3 *3] | |
| struct FloatRMat |
rotation matrix
Definition at line 77 of file pprz_algebra_float.h.
| Data Fields | ||
|---|---|---|
| float | m[3 *3] | |
| #define FLOAT_ANGLE_NORMALIZE | ( | _a | ) |
Definition at line 99 of file pprz_algebra_float.h.
Referenced by ahrs_fc_realign_heading(), ahrs_fc_update_heading(), attitude_ref_euler_float_update(), CN_escape_velocity(), CN_potential_heading(), CN_potential_velocity(), CN_vector_escape_velocity(), guidance_hybrid_airspeed_to_attitude(), stabilization_attitude_read_rc_setpoint_eulers_f(), and stabilization_attitude_run().
| #define FLOAT_EULERS_NORM | ( | _e | ) | WARNING("FLOAT_EULERS_NORM macro is deprecated, use the lower case function instead") float_eulers_norm(&(_e)) |
Definition at line 497 of file pprz_algebra_float.h.
| #define FLOAT_EULERS_OF_QUAT | ( | _e, | |
| _q | |||
| ) | WARNING("FLOAT_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") float_eulers_of_quat(&(_e), &(_q)) |
Definition at line 496 of file pprz_algebra_float.h.
| #define FLOAT_EULERS_OF_RMAT | ( | _e, | |
| _rm | |||
| ) | WARNING("FLOAT_EULERS_OF_RMAT macro is deprecated, use the lower case function instead") float_eulers_of_rmat(&(_e), &(_rm)) |
Definition at line 495 of file pprz_algebra_float.h.
| #define FLOAT_EULERS_ZERO | ( | _e | ) | EULERS_ASSIGN(_e, 0., 0., 0.); |
Definition at line 485 of file pprz_algebra_float.h.
Referenced by ahrs_dcm_init(), ArduIMU_init(), attitude_ref_euler_float_init(), attitude_ref_quat_float_init(), stabilization_attitude_enter(), stabilization_attitude_init(), and stabilization_attitude_run().
| #define FLOAT_MAT33_DIAG | ( | _m, | |
| _d00, | |||
| _d11, | |||
| _d22 | |||
| ) |
Definition at line 220 of file pprz_algebra_float.h.
Referenced by double_rmat_identity(), float_rmat_identity(), nps_sensor_accel_init(), nps_sensor_gyro_init(), and nps_sensor_mag_init().
| #define FLOAT_MAT33_ZERO | ( | _m | ) |
Definition at line 208 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_COMP | ( | _a2c, | |
| _a2b, | |||
| _b2c | |||
| ) | WARNING("FLOAT_QUAT_COMP macro is deprecated, use the lower case function instead") float_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
Definition at line 460 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_COMP_INV | ( | _a2b, | |
| _a2c, | |||
| _b2c | |||
| ) | WARNING("FLOAT_QUAT_COMP_INV macro is deprecated, use the lower case function instead") float_quat_comp_inv(&(_a2b), &(_a2c), &(_b2c)) |
Definition at line 463 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_COMP_INV_NORM_SHORTEST | ( | _a2b, | |
| _a2c, | |||
| _b2c | |||
| ) | WARNING("FLOAT_QUAT_COMP_INV_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_comp_inv_norm_shortest(&(_a2b), &(_a2c), &(_b2c)) |
Definition at line 465 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_COMP_NORM_SHORTEST | ( | _a2c, | |
| _a2b, | |||
| _b2c | |||
| ) | WARNING("FLOAT_QUAT_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_comp_norm_shortest(&(_a2c), &(_a2b), &(_b2c)) |
Definition at line 464 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_DERIVATIVE | ( | _qd, | |
| _r, | |||
| _q | |||
| ) | WARNING("FLOAT_QUAT_DERIVATIVE macro is deprecated, use the lower case function instead") float_quat_derivative(&(_qd), &(_r), &(_q)) |
Definition at line 470 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_DERIVATIVE_LAGRANGE | ( | _qd, | |
| _r, | |||
| _q | |||
| ) | WARNING("FLOAT_QUAT_DERIVATIVE_LAGRANGE macro is deprecated, use the lower case function instead") float_quat_derivative_lagrange(&(_qd), &(_r), &(_q)) |
Definition at line 471 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_DIFFERENTIAL | ( | q_out, | |
| w, | |||
| dt | |||
| ) | WARNING("FLOAT_QUAT_DIFFERENTIAL macro is deprecated, use the lower case function instead") float_quat_differential(&(q_out), &(w), dt) |
Definition at line 467 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_EXTRACT | ( | _vo, | |
| _qi | |||
| ) | QUAT_EXTRACT_Q(_vo, _qi) |
Definition at line 377 of file pprz_algebra_float.h.
Referenced by float_quat_vmul_right().
| #define FLOAT_QUAT_INTEGRATE | ( | _q, | |
| _omega, | |||
| _dt | |||
| ) | WARNING("FLOAT_QUAT_INTEGRATE macro is deprecated, use the lower case function instead") float_quat_integrate(&(_q), &(_omega), _dt) |
Definition at line 468 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_INV_COMP | ( | _b2c, | |
| _a2b, | |||
| _a2c | |||
| ) | WARNING("FLOAT_QUAT_INV_COMP macro is deprecated, use the lower case function instead") float_quat_inv_comp(&(_b2c), &(_a2b), &(_a2c)) |
Definition at line 462 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_INV_COMP_NORM_SHORTEST | ( | _b2c, | |
| _a2b, | |||
| _a2c | |||
| ) | WARNING("FLOAT_QUAT_INV_COMP_NORM_SHORTEST macro is deprecated, use the lower case function instead") float_quat_inv_comp_norm_shortest(&(_b2c), &(_a2b), &(_a2c)) |
Definition at line 466 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_INVERT | ( | _qo, | |
| _qi | |||
| ) | WARNING("FLOAT_QUAT_INVERT macro is deprecated, use the lower case function instead") float_quat_invert(&(_qo), &(_qi)) |
Definition at line 456 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_MULT | ( | _a2c, | |
| _a2b, | |||
| _b2c | |||
| ) | WARNING("FLOAT_QUAT_MULT macro is deprecated, use the lower case function instead") float_quat_comp(&(_a2c), &(_a2b), &(_b2c)) |
Definition at line 461 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_NORM | ( | _q | ) | WARNING("FLOAT_QUAT_NORM macro is deprecated, use the lower case function instead") float_quat_norm(&(_q)) |
Definition at line 458 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_NORM2 | ( | _q | ) | (SQUARE((_q).qi) + SQUARE((_q).qx) + SQUARE((_q).qy) + SQUARE((_q).qz)) |
Definition at line 347 of file pprz_algebra_float.h.
Referenced by invariant_model().
| #define FLOAT_QUAT_NORMALIZE | ( | _q | ) | WARNING("FLOAT_QUAT_NORMALIZE macro is deprecated, use the lower case function instead") float_quat_normalize(&(_q)) |
Definition at line 459 of file pprz_algebra_float.h.
Referenced by ahrs_float_invariant_propagate().
| #define FLOAT_QUAT_OF_AXIS_ANGLE | ( | _q, | |
| _uv, | |||
| _an | |||
| ) | WARNING("FLOAT_QUAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") float_quat_of_axis_angle(&(_q), &(_uv), _an) |
Definition at line 473 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_OF_EULERS | ( | _q, | |
| _e | |||
| ) | WARNING("FLOAT_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") float_quat_of_eulers(&(_q), &(_e)) |
Definition at line 472 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_OF_ORIENTATION_VECT | ( | _q, | |
| _ov | |||
| ) | WARNING("FLOAT_QUAT_OF_ORIENTATION_VECT macro is deprecated, use the lower case function instead") float_quat_of_orientation_vect(&(_q), &(_ov)) |
Definition at line 474 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_OF_RMAT | ( | _q, | |
| _r | |||
| ) | WARNING("FLOAT_QUAT_OF_RMAT macro is deprecated, use the lower case function instead") float_quat_of_rmat(&(_q), &(_r)) |
Definition at line 475 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_VMULT | ( | v_out, | |
| q, | |||
| v_in | |||
| ) | WARNING("FLOAT_QUAT_VMULT macro is deprecated, use the lower case function instead") float_quat_vmult(&(v_out), &(q), &(v_in)) |
Definition at line 469 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_WRAP_SHORTEST | ( | _q | ) | WARNING("FLOAT_QUAT_WRAP_SHORTEST macro is deprecated, use the lower case function instead") float_quat_wrap_shortest(&(_q)) |
Definition at line 457 of file pprz_algebra_float.h.
| #define FLOAT_QUAT_ZERO | ( | _q | ) | WARNING("FLOAT_QUAT_ZERO macro is deprecated, use the lower case function instead") float_quat_identity(&(_q)) |
Definition at line 455 of file pprz_algebra_float.h.
| #define FLOAT_RATES_INTEGRATE_FI | ( | _ra, | |
| _racc, | |||
| _dt | |||
| ) | WARNING("FLOAT_RATES_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_rates_integrate_fi(&(_ra), &(_racc), _dt) |
Definition at line 201 of file pprz_algebra_float.h.
| #define FLOAT_RATES_LIN_CMB | ( | _ro, | |
| _r1, | |||
| _s1, | |||
| _r2, | |||
| _s2 | |||
| ) |
Definition at line 183 of file pprz_algebra_float.h.
Referenced by ahrs_fc_propagate(), and propagate_ref().
Definition at line 181 of file pprz_algebra_float.h.
Referenced by float_quat_integrate().
| #define FLOAT_RATES_OF_EULER_DOT | ( | _ra, | |
| _e, | |||
| _ed | |||
| ) | WARNING("FLOAT_RATES_OF_EULER_DOT macro is deprecated, use the lower case function instead") float_rates_of_euler_dot(&(_ra), &(_e), &(_ed)) |
Definition at line 202 of file pprz_algebra_float.h.
| #define FLOAT_RATES_ZERO | ( | _r | ) |
Definition at line 177 of file pprz_algebra_float.h.
Referenced by ahrs_dcm_init(), ahrs_fc_init(), ahrs_fc_propagate(), ahrs_mlkf_init(), ArduIMU_init(), attitude_ref_euler_float_init(), attitude_ref_quat_float_init(), calc_edgeflow_tot(), init_invariant_state(), opticflow_calc_init(), opticflow_module_init(), stabilization_attitude_init(), stabilization_attitude_run(), stabilization_indi_calc_cmd(), stabilization_indi_enter(), stabilization_rate_enter(), stabilization_rate_init(), and stabilization_rate_run().
| #define FLOAT_RMAT_COMP | ( | _m_a2c, | |
| _m_a2b, | |||
| _m_b2c | |||
| ) | WARNING("FLOAT_RMAT_COMP macro is deprecated, use the lower case function instead") float_rmat_comp(&(_m_a2c), &(_m_a2b), &(_m_b2c)) |
Definition at line 317 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_COMP_INV | ( | _m_a2b, | |
| _m_a2c, | |||
| _m_b2c | |||
| ) | WARNING("FLOAT_RMAT_COMP_INV macro is deprecated, use the lower case function instead") float_rmat_comp_inv(&(_m_a2b), &(_m_a2c), &(_m_b2c)) |
Definition at line 318 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_INTEGRATE_FI | ( | _rm, | |
| _omega, | |||
| _dt | |||
| ) | WARNING("FLOAT_RMAT_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_rmat_integrate_fi(&(_rm), &(_omega), &(_dt)) |
Definition at line 328 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_INV | ( | _m_b2a, | |
| _m_a2b | |||
| ) | WARNING("FLOAT_RMAT_INV macro is deprecated, use the lower case function instead") float_rmat_inv(&(_m_b2a), &(_m_a2b)) |
Definition at line 315 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_NORM | ( | _m | ) | WARNING("FLOAT_RMAT_NORM macro is deprecated, use the lower case function instead") float_rmat_norm(&(_m)) |
Definition at line 316 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_OF_AXIS_ANGLE | ( | _rm, | |
| _uv, | |||
| _an | |||
| ) | WARNING("FLOAT_RMAT_OF_AXIS_ANGLE macro is deprecated, use the lower case function instead") float_rmat_of_axis_angle(&(_rm), &(_uv), _an) |
Definition at line 323 of file pprz_algebra_float.h.
| #define float_rmat_of_eulers float_rmat_of_eulers_321 |
Definition at line 307 of file pprz_algebra_float.h.
Referenced by ahrs_dcm_align(), orientationCalcRMat_f(), and set_body_orientation_and_rates().
| #define FLOAT_RMAT_OF_EULERS | ( | _rm, | |
| _e | |||
| ) | WARNING("FLOAT_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") float_rmat_of_eulers_321(&(_rm), &(_e)) |
Definition at line 324 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_OF_EULERS_312 | ( | _rm, | |
| _e | |||
| ) | WARNING("FLOAT_RMAT_OF_EULERS_312 macro is deprecated, use the lower case function instead") float_rmat_of_eulers_312(&(_rm), &(_e)) |
Definition at line 326 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_OF_EULERS_321 | ( | _rm, | |
| _e | |||
| ) | WARNING("FLOAT_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") float_rmat_of_eulers_321(&(_rm), &(_e)) |
Definition at line 325 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_OF_QUAT | ( | _rm, | |
| _q | |||
| ) | WARNING("FLOAT_RMAT_OF_QUAT macro is deprecated, use the lower case function instead") float_rmat_of_quat(&(_rm), &(_q)) |
Definition at line 327 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_RATEMULT | ( | _rb, | |
| _m_a2b, | |||
| _ra | |||
| ) | WARNING("FLOAT_RMAT_RATEMULT macro is deprecated, use the lower case function instead") float_rmat_ratemult(&(_rb), &(_m_a2b), &(_ra)) |
Definition at line 321 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_TRANSP_RATEMULT | ( | _rb, | |
| _m_b2a, | |||
| _ra | |||
| ) | WARNING("FLOAT_RMAT_TRANSP_RATEMULT macro is deprecated, use the lower case function instead") float_rmat_ratemult(&(_rb), &(_m_b2a), &(_ra)) |
Definition at line 322 of file pprz_algebra_float.h.
Referenced by gx3_packet_read_message().
| #define FLOAT_RMAT_TRANSP_VMULT | ( | _vb, | |
| _m_b2a, | |||
| _va | |||
| ) | WARNING("FLOAT_RMAT_TRANSP_VMULT macro is deprecated, use the lower case function instead") float_rmat_transp_vmult(&(_vb), &(_m_b2a), &(_va)) |
Definition at line 320 of file pprz_algebra_float.h.
| #define FLOAT_RMAT_VMULT | ( | _vb, | |
| _m_a2b, | |||
| _va | |||
| ) | WARNING("FLOAT_RMAT_VMULT macro is deprecated, use the lower case function instead") float_rmat_vmult(&(_vb), &(_m_a2b), &(_va)) |
Definition at line 319 of file pprz_algebra_float.h.
| #define FLOAT_VECT2_NORM | ( | _v | ) | sqrtf(VECT2_NORM2(_v)) |
Definition at line 118 of file pprz_algebra_float.h.
Referenced by handle_ins_msg(), nps_atmosphere_set_wind_ned(), parse_gps_datalink(), parse_gps_datalink_small(), stateCalcHorizontalSpeedNorm_f(), and stateCalcHorizontalSpeedNorm_i().
| #define FLOAT_VECT2_NORMALIZE | ( | _v | ) | float_vect2_normalize(&(_v)) |
Definition at line 140 of file pprz_algebra_float.h.
Referenced by nav_survey_polygon_setup(), and nav_survey_zamboni_setup().
| #define FLOAT_VECT2_ZERO | ( | _v | ) | VECT2_ASSIGN(_v, 0., 0.) |
Definition at line 115 of file pprz_algebra_float.h.
| #define FLOAT_VECT3_INTEGRATE_FI | ( | _vo, | |
| _dv, | |||
| _dt | |||
| ) | WARNING("FLOAT_VECT3_INTEGRATE_FI macro is deprecated, use the lower case function instead") float_vect3_integrate_fi(&(_vo), &(_dv), _dt) |
Definition at line 200 of file pprz_algebra_float.h.
| #define FLOAT_VECT3_NORM | ( | _v | ) | sqrtf(VECT3_NORM2(_v)) |
Definition at line 150 of file pprz_algebra_float.h.
Referenced by ahrs_icq_update_accel(), nav_spiral_run(), nav_spiral_setup(), parse_gps_datalink(), parse_gps_datalink_small(), and quat_from_earth_cmd_f().
| #define FLOAT_VECT3_NORMALIZE | ( | _v | ) | float_vect3_normalize(&(_v)) |
Definition at line 173 of file pprz_algebra_float.h.
| #define FLOAT_VECT3_ZERO | ( | _v | ) | VECT3_ASSIGN(_v, 0., 0., 0.) |
Definition at line 147 of file pprz_algebra_float.h.
Referenced by ahrs_float_invariant_update_mag(), ArduIMU_init(), error_output(), guidance_indi_enter(), init_invariant_state(), ins_float_invariant_update_mag(), ins_vectornav_init(), nps_atmosphere_init(), nps_sensor_accel_init(), nps_sensor_gps_init(), and nps_sensor_gyro_init().
| #define M_SQRT2 1.41421356237309504880 |
Definition at line 46 of file pprz_algebra_float.h.
Referenced by double_rmat_of_quat(), and float_rmat_of_quat().
| #define MAKE_MATRIX_PTR | ( | _ptr, | |
| _mat, | |||
| _rows | |||
| ) |
Make a pointer to a matrix of _rows lines.
Definition at line 586 of file pprz_algebra_float.h.
Referenced by fit_linear_flow_field(), pprz_cholesky_float(), pprz_polyfit_float(), and pprz_qr_float().
|
inlinestatic |
Definition at line 487 of file pprz_algebra_float.h.
References FloatEulers::phi, FloatEulers::psi, SQUARE, and FloatEulers::theta.
| void float_eulers_of_quat | ( | struct FloatEulers * | e, |
| struct FloatQuat * | q | ||
| ) |
Definition at line 560 of file pprz_algebra_float.c.
References FloatEulers::phi, FloatEulers::psi, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatEulers::theta.
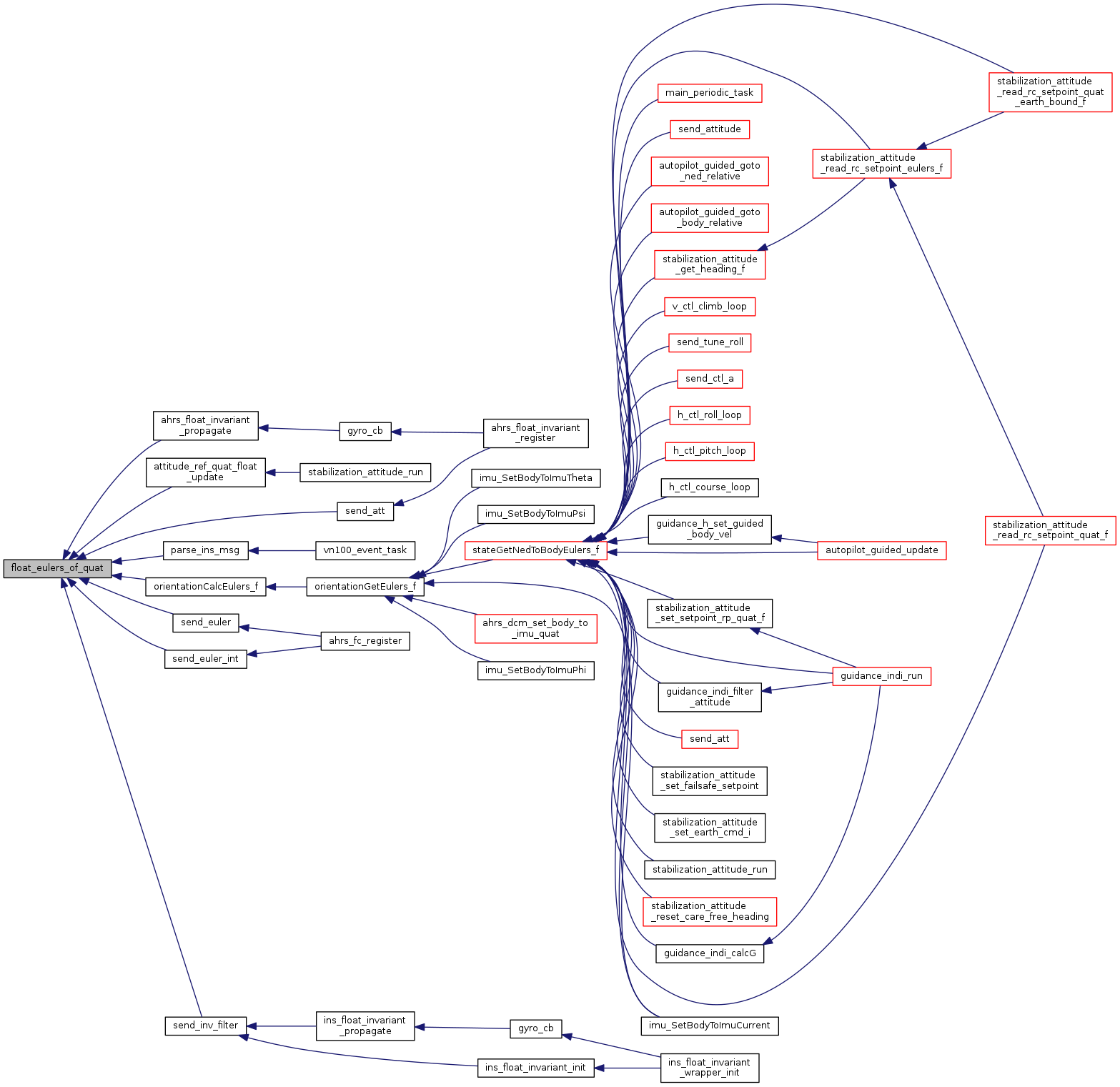
Referenced by ahrs_float_invariant_propagate(), attitude_ref_quat_float_update(), orientationCalcEulers_f(), parse_ins_msg(), send_att(), send_euler(), send_euler_int(), and send_inv_filter().
Here is the caller graph for this function:| void float_eulers_of_rmat | ( | struct FloatEulers * | e, |
| struct FloatRMat * | rm | ||
| ) |
Definition at line 548 of file pprz_algebra_float.c.
References FloatRMat::m, FloatEulers::phi, FloatEulers::psi, and FloatEulers::theta.
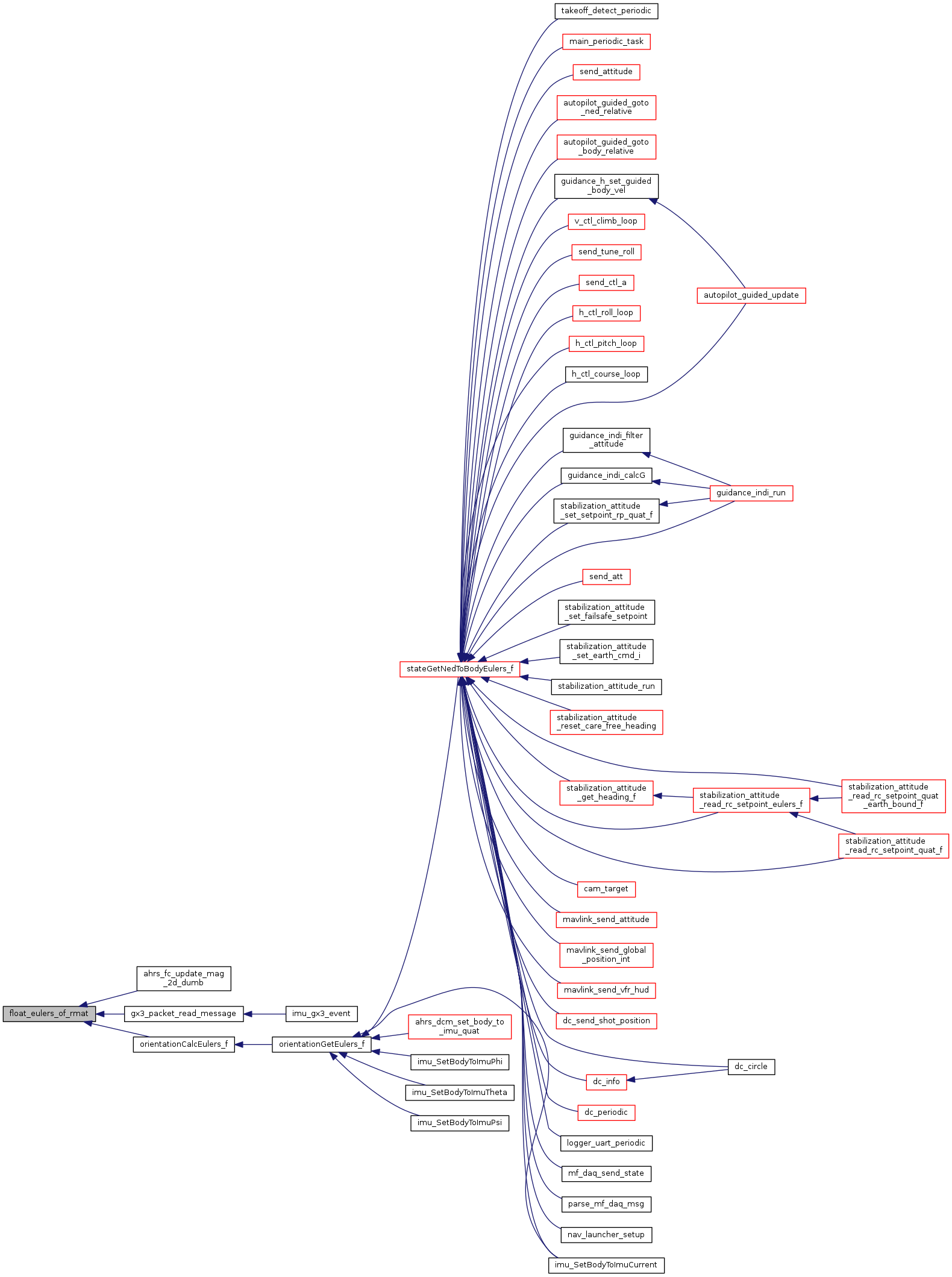
Referenced by ahrs_fc_update_mag_2d_dumb(), gx3_packet_read_message(), and orientationCalcEulers_f().
Here is the caller graph for this function:
|
inlinestatic |
o = c-th column of matrix a[m x n]
Definition at line 694 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
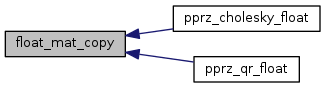
a = b
Definition at line 603 of file pprz_algebra_float.h.
Referenced by pprz_cholesky_float(), and pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
o = a - b
Definition at line 621 of file pprz_algebra_float.h.
|
inlinestatic |
matrix minor
a: [m x n] o: [I(d,d) 0 ] [ 0 a(d,m:d,n)]
Definition at line 667 of file pprz_algebra_float.h.
References float_mat_zero().
Referenced by pprz_qr_float().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
o = a * b
a: [m x n] b: [n x l] o: [m x l]
Definition at line 648 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
o = a + b
Definition at line 612 of file pprz_algebra_float.h.
|
inlinestatic |
transpose square matrix
Definition at line 630 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
o = I - v v^T
Definition at line 680 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
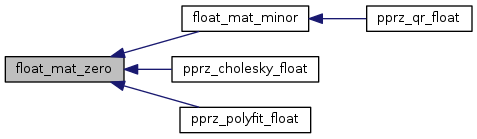
a = 0
Definition at line 594 of file pprz_algebra_float.h.
Referenced by float_mat_minor(), pprz_cholesky_float(), and pprz_polyfit_float().
Here is the caller graph for this function:Composition (multiplication) of two quaternions.
a2c = a2b comp b2c , aka a2c = a2b * b2c
Definition at line 300 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, and FloatQuat::qz.
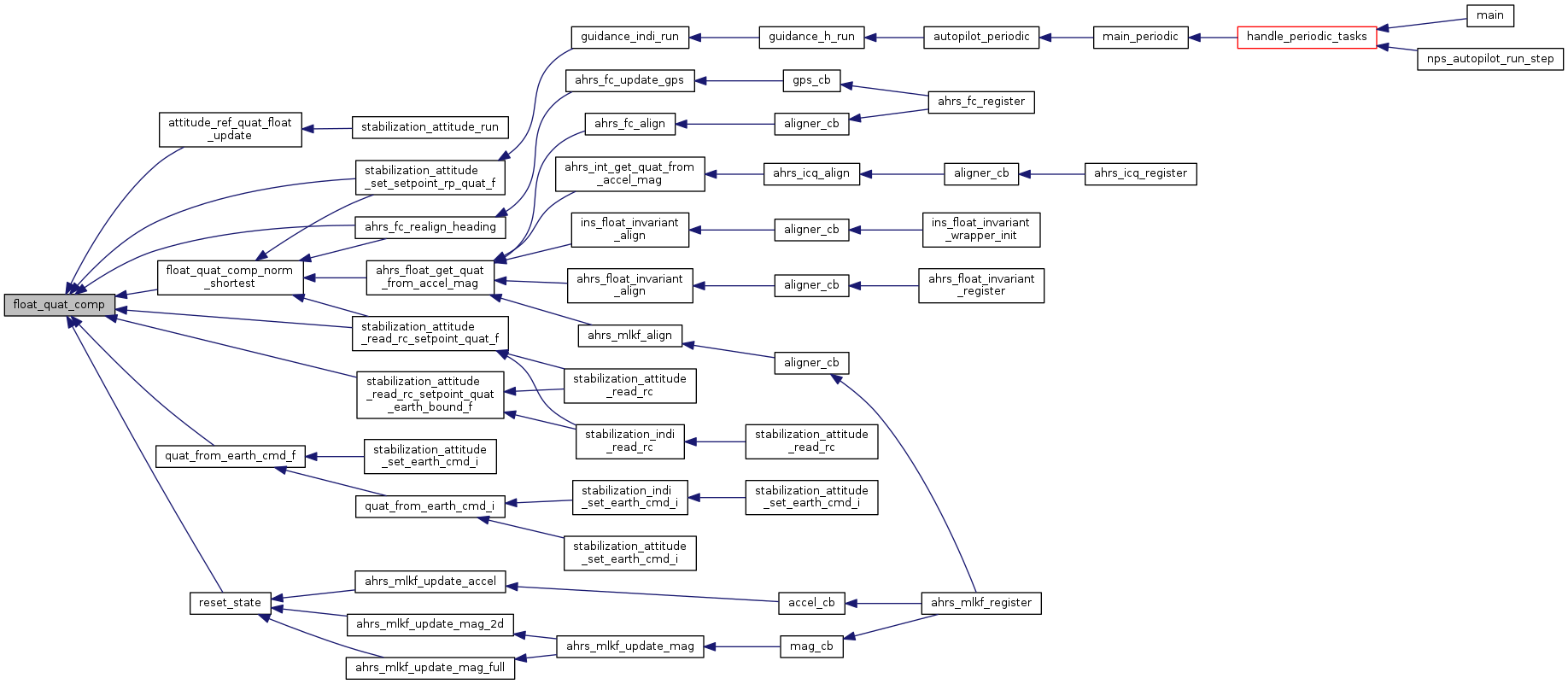
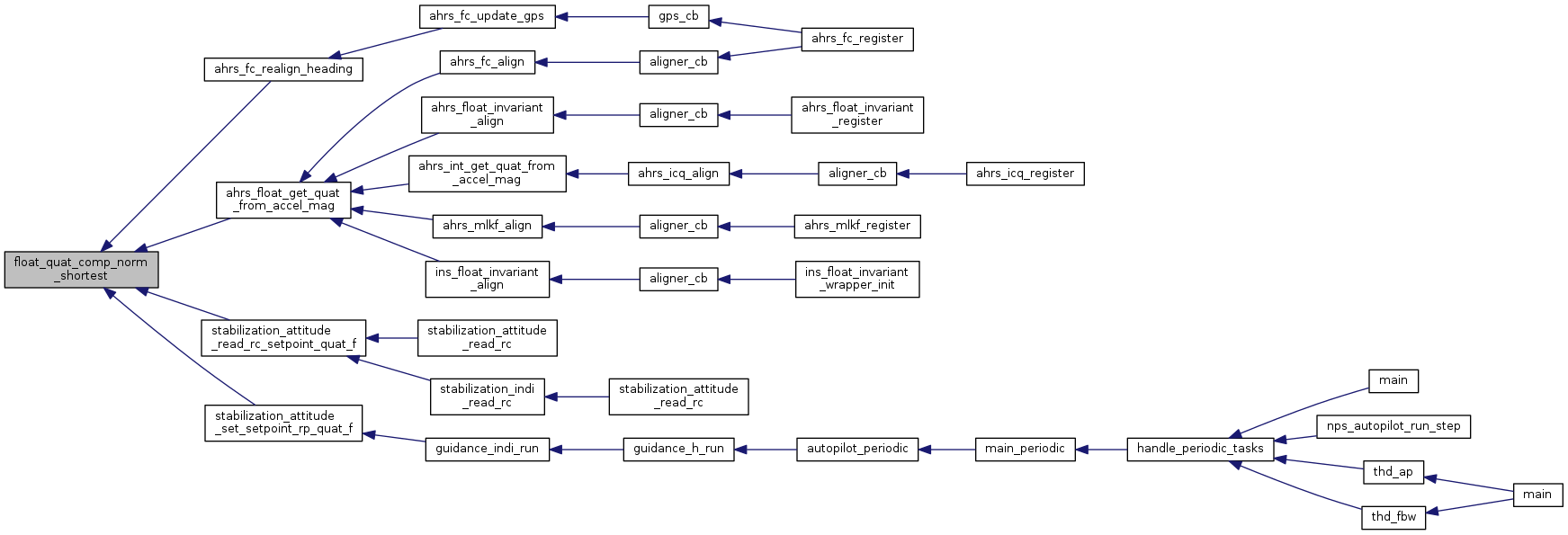
Referenced by ahrs_fc_realign_heading(), attitude_ref_quat_float_update(), float_quat_comp_norm_shortest(), quat_from_earth_cmd_f(), reset_state(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_attitude_set_setpoint_rp_quat_f().
Here is the caller graph for this function:Composition (multiplication) of two quaternions.
a2b = a2c comp_inv b2c , aka a2b = a2c * inv(b2c)
Definition at line 308 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, and FloatQuat::qz.
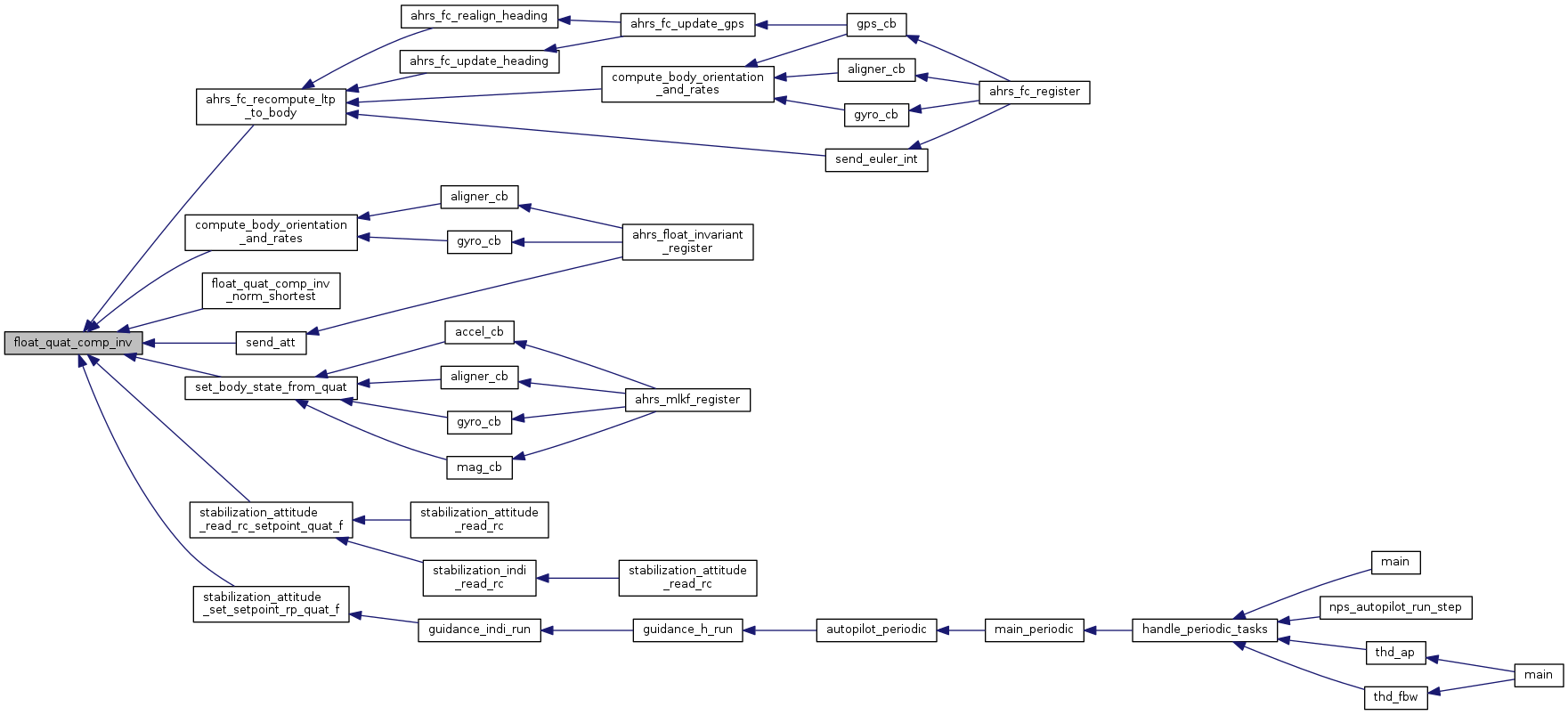
Referenced by ahrs_fc_recompute_ltp_to_body(), compute_body_orientation_and_rates(), float_quat_comp_inv_norm_shortest(), send_att(), set_body_state_from_quat(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_attitude_set_setpoint_rp_quat_f().
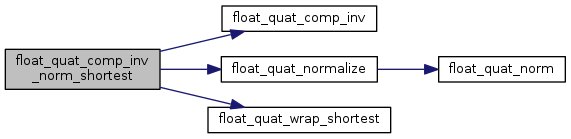
Here is the caller graph for this function:| void float_quat_comp_inv_norm_shortest | ( | struct FloatQuat * | a2b, |
| struct FloatQuat * | a2c, | ||
| struct FloatQuat * | b2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
a2b = a2c comp_inv b2c , aka a2b = a2c * inv(b2c)
Definition at line 331 of file pprz_algebra_float.c.
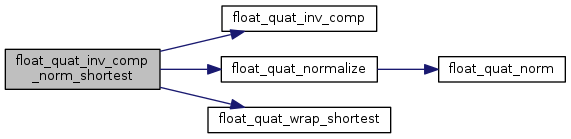
References float_quat_comp_inv(), float_quat_normalize(), and float_quat_wrap_shortest().
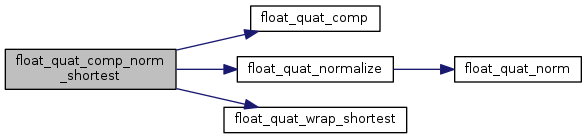
Here is the call graph for this function:| void float_quat_comp_norm_shortest | ( | struct FloatQuat * | a2c, |
| struct FloatQuat * | a2b, | ||
| struct FloatQuat * | b2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
a2c = a2b comp b2c , aka a2c = a2b * b2c
Definition at line 324 of file pprz_algebra_float.c.
References float_quat_comp(), float_quat_normalize(), and float_quat_wrap_shortest().
Referenced by ahrs_fc_realign_heading(), ahrs_float_get_quat_from_accel_mag(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_attitude_set_setpoint_rp_quat_f().
Here is the call graph for this function: Here is the caller graph for this function:| void float_quat_derivative | ( | struct FloatQuat * | qd, |
| struct FloatRates * | r, | ||
| struct FloatQuat * | q | ||
| ) |
Quaternion derivative from rotational velocity.
qd = -0.5*omega(r) * q or equally: qd = 0.5 * q * omega(r)
Definition at line 430 of file pprz_algebra_float.c.
References FloatRates::p, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatRates::r.
Referenced by attitude_ref_quat_float_update(), and invariant_model().
Here is the caller graph for this function:| void float_quat_derivative_lagrange | ( | struct FloatQuat * | qd, |
| struct FloatRates * | r, | ||
| struct FloatQuat * | q | ||
| ) |
Quaternion derivative from rotational velocity with Lagrange multiplier.
qd = -0.5*omega(r) * q or equally: qd = 0.5 * q * omega(r)
Quaternion derivative from rotational velocity with Lagrange multiplier.
qd = -0.5*omega(r) * q
Definition at line 441 of file pprz_algebra_float.c.
References float_quat_norm(), FloatRates::p, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatRates::r.
Here is the call graph for this function:| void float_quat_differential | ( | struct FloatQuat * | q_out, |
| struct FloatRates * | w, | ||
| float | dt | ||
| ) |
Delta rotation quaternion with constant angular rates.
Definition at line 345 of file pprz_algebra_float.c.
References c2, FloatRates::p, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatRates::r.
Referenced by attitude_ref_quat_float_update().
Here is the caller graph for this function:
|
inlinestatic |
initialises a quaternion to identity
Definition at line 339 of file pprz_algebra_float.h.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, and FloatQuat::qz.
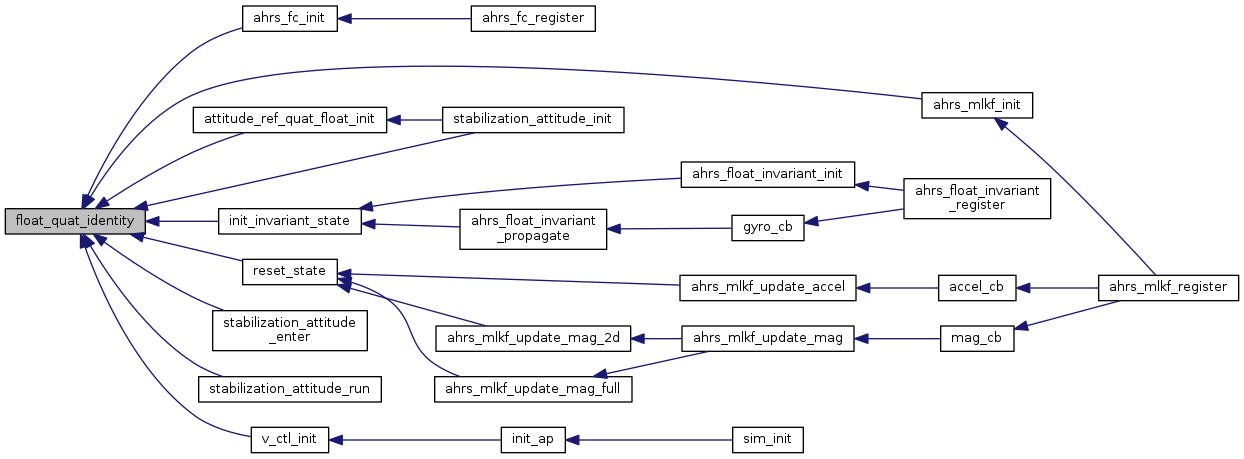
Referenced by ahrs_fc_init(), ahrs_mlkf_init(), attitude_ref_quat_float_init(), init_invariant_state(), reset_state(), stabilization_attitude_enter(), stabilization_attitude_init(), stabilization_attitude_run(), and v_ctl_init().
Here is the caller graph for this function:| void float_quat_integrate | ( | struct FloatQuat * | q, |
| struct FloatRates * | omega, | ||
| float | dt | ||
| ) |
in place quaternion integration with constant rotational velocity
Definition at line 380 of file pprz_algebra_float.c.
References dt, FLOAT_RATES_NORM, FloatRates::p, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatRates::r.
Referenced by ahrs_fc_propagate(), and propagate_ref().
Here is the caller graph for this function:| void float_quat_integrate_fi | ( | struct FloatQuat * | q, |
| struct FloatRates * | omega, | ||
| float | dt | ||
| ) |
in place first order quaternion integration with constant rotational velocity
Definition at line 364 of file pprz_algebra_float.c.
References FloatRates::p, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatRates::r.
Composition (multiplication) of two quaternions.
b2c = a2b inv_comp a2c , aka b2c = inv(_a2b) * a2c
Definition at line 316 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, and FloatQuat::qz.
Referenced by attitude_ref_quat_float_update(), float_quat_inv_comp_norm_shortest(), and stabilization_attitude_run().
Here is the caller graph for this function:| void float_quat_inv_comp_norm_shortest | ( | struct FloatQuat * | b2c, |
| struct FloatQuat * | a2b, | ||
| struct FloatQuat * | a2c | ||
| ) |
Composition (multiplication) of two quaternions with normalization.
b2c = a2b inv_comp a2c , aka b2c = inv(_a2b) * a2c
Definition at line 338 of file pprz_algebra_float.c.
References float_quat_inv_comp(), float_quat_normalize(), and float_quat_wrap_shortest().
Referenced by ahrs_fc_realign_heading().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 365 of file pprz_algebra_float.h.
References QUAT_INVERT.
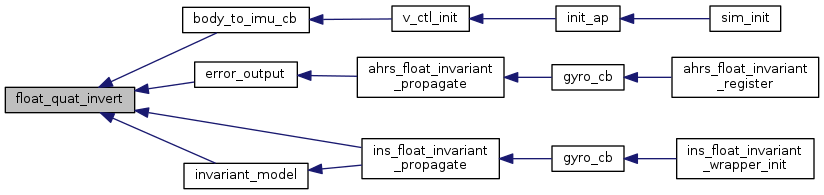
Referenced by body_to_imu_cb(), error_output(), ins_float_invariant_propagate(), and invariant_model().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 349 of file pprz_algebra_float.h.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and SQUARE.
Referenced by float_quat_derivative_lagrange(), and float_quat_normalize().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 354 of file pprz_algebra_float.h.
References float_quat_norm(), FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, and FloatQuat::qz.
Referenced by ahrs_fc_propagate(), ahrs_fc_realign_heading(), ahrs_float_get_quat_from_accel(), ahrs_float_get_quat_from_accel_mag(), attitude_ref_quat_float_update(), float_quat_comp_inv_norm_shortest(), float_quat_comp_norm_shortest(), float_quat_inv_comp_norm_shortest(), ins_float_invariant_propagate(), quat_from_earth_cmd_f(), reset_state(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_attitude_set_setpoint_rp_quat_f().
Here is the call graph for this function: Here is the caller graph for this function:| void float_quat_of_axis_angle | ( | struct FloatQuat * | q, |
| const struct FloatVect3 * | uv, | ||
| float | angle | ||
| ) |
Quaternion from unit vector and angle.
Definition at line 471 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_attitude_set_setpoint_rp_quat_f().
Here is the caller graph for this function:| void float_quat_of_eulers | ( | struct FloatQuat * | q, |
| struct FloatEulers * | e | ||
| ) |
Quaternion from Euler angles.
Definition at line 451 of file pprz_algebra_float.c.
References FloatEulers::phi, FloatEulers::psi, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and FloatEulers::theta.
Referenced by ins_vectornav_propagate(), orientationCalcQuat_f(), reset_psi_ref(), stabilization_attitude_set_rpy_setpoint_i(), and stabilization_attitude_set_setpoint_rp_quat_f().
Here is the caller graph for this function:| void float_quat_of_orientation_vect | ( | struct FloatQuat * | q, |
| const struct FloatVect3 * | ov | ||
| ) |
Quaternion from orientation vector.
Length/norm of the vector is the angle.
Definition at line 480 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by guidance_hybrid_set_cmd_i(), quat_from_earth_cmd_f(), quat_from_rpy_cmd_f(), stabilization_attitude_heli_indi_set_steadystate_pitchroll(), and stabilization_attitude_read_rc_roll_pitch_quat_f().
Here is the caller graph for this function:Quaternion from rotation matrix.
Definition at line 497 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, RMAT_ELMT, and RMAT_TRACE.
Referenced by ahrs_fc_propagate(), and orientationCalcQuat_f().
Here is the caller graph for this function:| void float_quat_vmult | ( | struct FloatVect3 * | v_out, |
| struct FloatQuat * | q, | ||
| const struct FloatVect3 * | v_in | ||
| ) |
rotate 3D vector by quaternion.
vb = q_a2b * va * q_a2b^-1
Definition at line 401 of file pprz_algebra_float.c.
References FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by error_output(), ins_float_invariant_propagate(), invariant_model(), update_state(), update_state_heading(), v_ctl_climb_loop(), and vel_est_cb().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 370 of file pprz_algebra_float.h.
References FloatQuat::qi, and QUAT_EXPLEMENTARY.
Referenced by attitude_ref_quat_float_update(), float_quat_comp_inv_norm_shortest(), float_quat_comp_norm_shortest(), float_quat_inv_comp_norm_shortest(), quat_from_earth_cmd_f(), reset_psi_ref(), and stabilization_attitude_run().
Here is the caller graph for this function:| void float_rates_integrate_fi | ( | struct FloatRates * | r, |
| struct FloatRates * | dr, | ||
| float | dt | ||
| ) |
in place first order integration of angular rates
Definition at line 38 of file pprz_algebra_float.c.
References dt, FloatRates::p, FloatRates::q, and FloatRates::r.
Referenced by stabilization_indi_second_order_filter().
Here is the caller graph for this function:| void float_rates_of_euler_dot | ( | struct FloatRates * | r, |
| struct FloatEulers * | e, | ||
| struct FloatEulers * | edot | ||
| ) |
Definition at line 45 of file pprz_algebra_float.c.
References FloatRates::p, FloatEulers::phi, FloatEulers::psi, FloatRates::q, FloatRates::r, and FloatEulers::theta.
| void float_rmat_comp | ( | struct FloatRMat * | m_a2c, |
| struct FloatRMat * | m_a2b, | ||
| struct FloatRMat * | m_b2c | ||
| ) |
Composition (multiplication) of two rotation matrices.
m_a2c = m_a2b comp m_b2c , aka m_a2c = m_b2c * m_a2b
Definition at line 78 of file pprz_algebra_float.c.
References FloatRMat::m.
Referenced by float_rmat_integrate_fi(), gx3_packet_read_message(), and ins_vectornav_propagate().
Here is the caller graph for this function:| void float_rmat_comp_inv | ( | struct FloatRMat * | m_a2b, |
| struct FloatRMat * | m_a2c, | ||
| struct FloatRMat * | m_b2c | ||
| ) |
Composition (multiplication) of two rotation matrices.
m_a2b = m_a2c comp_inv m_b2c , aka m_a2b = inv(_m_b2c) * m_a2c
Definition at line 94 of file pprz_algebra_float.c.
References FloatRMat::m.
Referenced by set_body_orientation_and_rates().
Here is the caller graph for this function:
|
inlinestatic |
initialises a rotation matrix to identity
Definition at line 241 of file pprz_algebra_float.h.
References FLOAT_MAT33_DIAG.
| void float_rmat_integrate_fi | ( | struct FloatRMat * | rm, |
| struct FloatRates * | omega, | ||
| float | dt | ||
| ) |
in place first order integration of a rotation matrix
Definition at line 241 of file pprz_algebra_float.c.
References float_rmat_comp(), FloatRates::p, FloatRates::q, and FloatRates::r.
Referenced by ahrs_fc_propagate().
Here is the call graph for this function: Here is the caller graph for this function:Inverse/transpose of a rotation matrix.
m_b2a = inv(_m_a2b) = transp(_m_a2b)
Definition at line 55 of file pprz_algebra_float.c.
References RMAT_ELMT.
| float float_rmat_norm | ( | struct FloatRMat * | rm | ) |
Norm of a rotation matrix.
Definition at line 68 of file pprz_algebra_float.c.
References FloatRMat::m, and SQUARE.
| void float_rmat_of_axis_angle | ( | struct FloatRMat * | rm, |
| struct FloatVect3 * | uv, | ||
| float | angle | ||
| ) |
initialises a rotation matrix from unit vector axis and angle
Definition at line 149 of file pprz_algebra_float.c.
References RMAT_ELMT, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
| void float_rmat_of_eulers_312 | ( | struct FloatRMat * | rm, |
| struct FloatEulers * | e | ||
| ) |
Definition at line 194 of file pprz_algebra_float.c.
References FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, and FloatEulers::theta.
| void float_rmat_of_eulers_321 | ( | struct FloatRMat * | rm, |
| struct FloatEulers * | e | ||
| ) |
Rotation matrix from 321 Euler angles (float).
The Euler angles are interpreted as zy'x'' (intrinsic) rotation. First rotate around z with psi, then around the new y' with theta, then around new x'' with phi. This is the same as a xyz (extrinsic) rotation, rotating around the fixed x, then y then z axis.
| [out] | rm | pointer to rotation matrix |
| [in] | e | pointer to Euler angles |
Definition at line 174 of file pprz_algebra_float.c.
References FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, and FloatEulers::theta.
Definition at line 216 of file pprz_algebra_float.c.
References M_SQRT2, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, and RMAT_ELMT.
Referenced by ahrs_fc_align(), ahrs_fc_propagate(), ahrs_fc_realign_heading(), ahrs_float_get_quat_from_accel_mag(), ins_vectornav_propagate(), orientationCalcRMat_f(), and quat_from_earth_cmd_f().
Here is the caller graph for this function:| void float_rmat_ratemult | ( | struct FloatRates * | rb, |
| struct FloatRMat * | m_a2b, | ||
| struct FloatRates * | ra | ||
| ) |
rotate anglular rates by rotation matrix.
rb = m_a2b * ra
Definition at line 130 of file pprz_algebra_float.c.
References FloatRMat::m, FloatRates::p, FloatRates::q, and FloatRates::r.
Referenced by ins_vectornav_propagate().
Here is the caller graph for this function:| float float_rmat_reorthogonalize | ( | struct FloatRMat * | rm | ) |
Definition at line 266 of file pprz_algebra_float.c.
References MAT33_ROW_VECT3_SMUL, renorm_factor(), RMAT_ELMT, VECT3_CROSS_PRODUCT, VECT3_DOT_PRODUCT, VECT3_NORM2, and VECT3_SUM_SCALED.
Referenced by ahrs_fc_propagate().
Here is the call graph for this function: Here is the caller graph for this function:| void float_rmat_transp_ratemult | ( | struct FloatRates * | rb, |
| struct FloatRMat * | m_b2a, | ||
| struct FloatRates * | ra | ||
| ) |
rotate anglular rates by transposed rotation matrix.
rb = m_b2a^T * ra
Definition at line 140 of file pprz_algebra_float.c.
References FloatRMat::m, FloatRates::p, FloatRates::q, and FloatRates::r.
Referenced by ahrs_fc_update_accel(), ahrs_float_invariant_propagate(), compute_body_orientation_and_rates(), ins_float_invariant_propagate(), set_body_orientation_and_rates(), and set_body_state_from_quat().
Here is the caller graph for this function:| void float_rmat_transp_vmult | ( | struct FloatVect3 * | vb, |
| struct FloatRMat * | m_b2a, | ||
| struct FloatVect3 * | va | ||
| ) |
rotate 3D vector by transposed rotation matrix.
vb = m_b2a^T * va
Definition at line 120 of file pprz_algebra_float.c.
References FloatRMat::m, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ahrs_fc_update_mag_2d(), ahrs_float_get_quat_from_accel_mag(), ahrs_float_invariant_update_mag(), ins_float_invariant_propagate(), ins_float_invariant_update_mag(), ins_vectornav_propagate(), and nav_catapult_highrate_module().
Here is the caller graph for this function:| void float_rmat_vmult | ( | struct FloatVect3 * | vb, |
| struct FloatRMat * | m_a2b, | ||
| struct FloatVect3 * | va | ||
| ) |
rotate 3D vector by rotation matrix.
vb = m_a2b * va
Definition at line 110 of file pprz_algebra_float.c.
References FloatRMat::m, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ahrs_fc_update_accel(), ahrs_fc_update_heading(), ahrs_fc_update_mag_2d(), and ahrs_fc_update_mag_full().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 125 of file pprz_algebra_float.h.
References float_vect2_norm2().
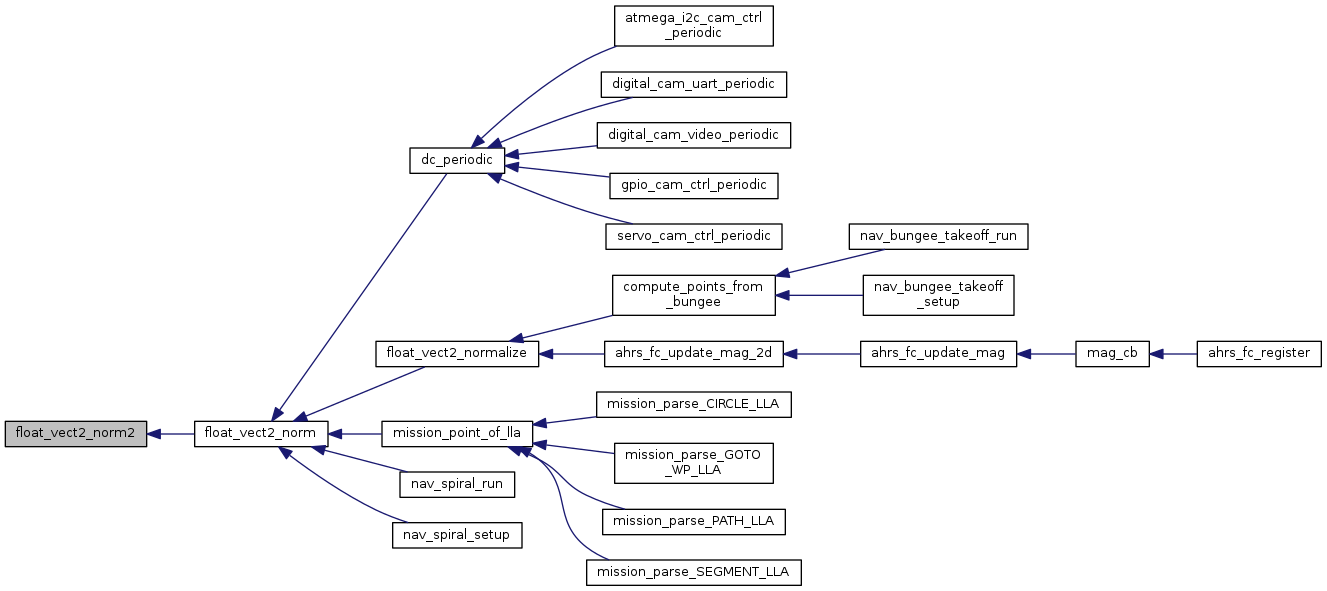
Referenced by dc_periodic(), float_vect2_normalize(), mission_point_of_lla(), nav_spiral_run(), and nav_spiral_setup().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 120 of file pprz_algebra_float.h.
References FloatVect2::x, and FloatVect2::y.
Referenced by float_vect2_norm().
Here is the caller graph for this function:
|
inlinestatic |
normalize 2D vector in place
Definition at line 131 of file pprz_algebra_float.h.
References float_vect2_norm(), FloatVect2::x, and FloatVect2::y.
Referenced by ahrs_fc_update_mag_2d(), and compute_points_from_bungee().
Here is the call graph for this function: Here is the caller graph for this function:| void float_vect3_integrate_fi | ( | struct FloatVect3 * | vec, |
| struct FloatVect3 * | dv, | ||
| float | dt | ||
| ) |
in place first order integration of a 3D-vector
Definition at line 30 of file pprz_algebra_float.c.
References dt, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
|
inlinestatic |
Definition at line 157 of file pprz_algebra_float.h.
References float_vect3_norm2().
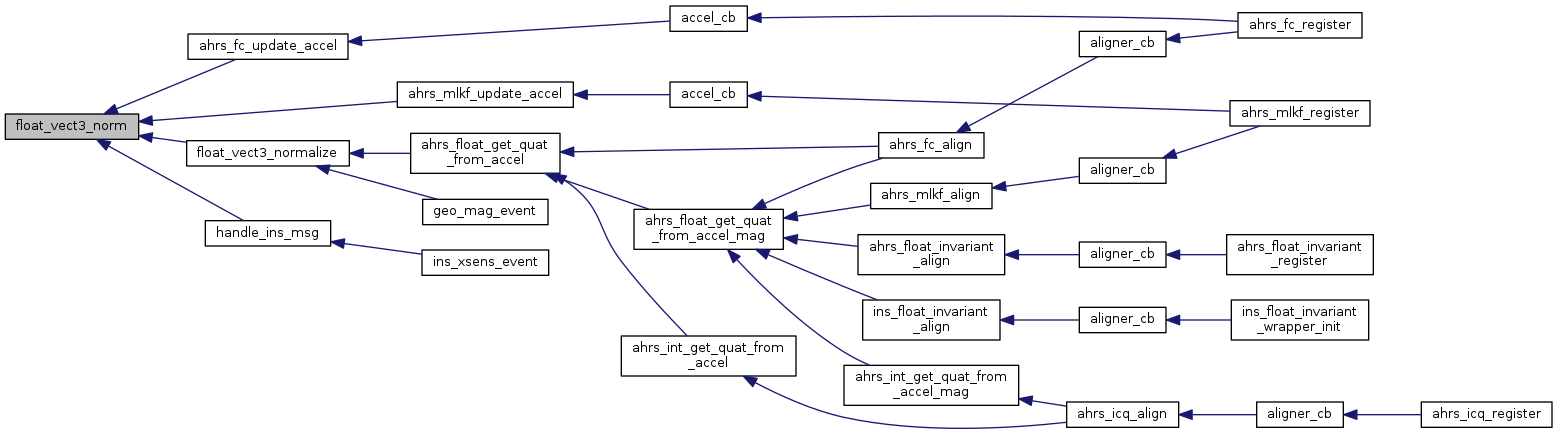
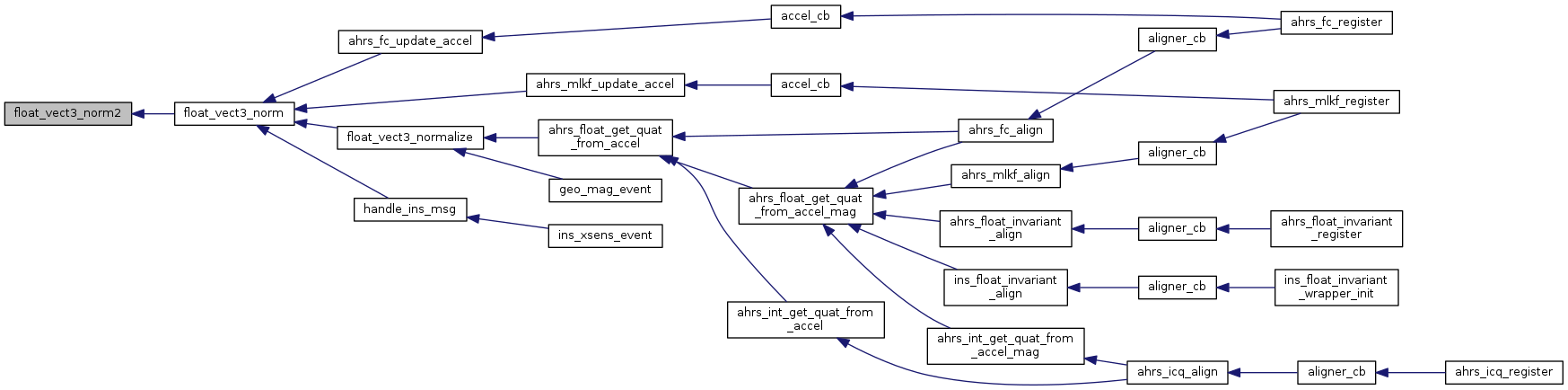
Referenced by ahrs_fc_update_accel(), ahrs_mlkf_update_accel(), float_vect3_normalize(), and handle_ins_msg().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 152 of file pprz_algebra_float.h.
References FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by float_vect3_norm().
Here is the caller graph for this function:
|
inlinestatic |
normalize 3D vector in place
Definition at line 163 of file pprz_algebra_float.h.
References float_vect3_norm(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
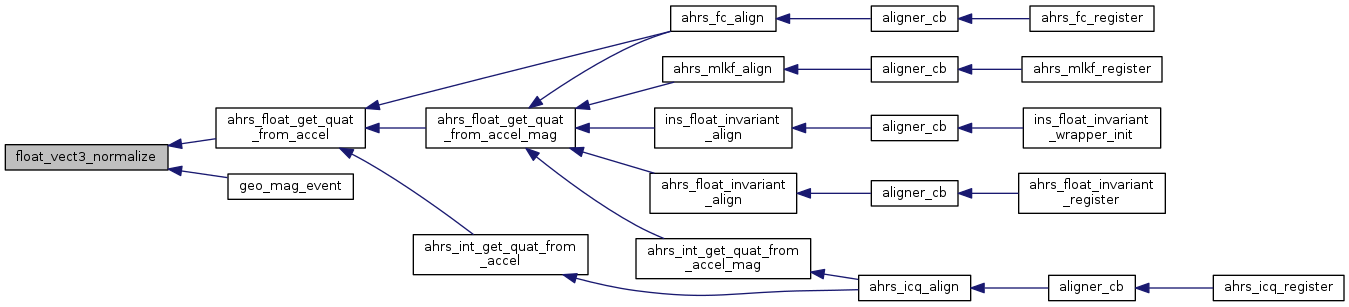
Referenced by ahrs_float_get_quat_from_accel(), and geo_mag_event().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
a += b
Definition at line 541 of file pprz_algebra_float.h.
Referenced by runge_kutta_1_float(), runge_kutta_2_float(), and runge_kutta_4_float().
Here is the caller graph for this function:
|
inlinestatic |
a = b
Definition at line 513 of file pprz_algebra_float.h.
|
inlinestatic |
o = a - b
Definition at line 527 of file pprz_algebra_float.h.
|
inlinestatic |
o = a * b (element wise)
Definition at line 534 of file pprz_algebra_float.h.
|
inlinestatic |
||a||
Definition at line 571 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
o = a / s
Definition at line 562 of file pprz_algebra_float.h.
Referenced by pprz_qr_float().
Here is the caller graph for this function:
|
inlinestatic |
o = a * s
Definition at line 555 of file pprz_algebra_float.h.
Referenced by runge_kutta_1_float(), runge_kutta_2_float(), and runge_kutta_4_float().
Here is the caller graph for this function:
|
inlinestatic |
a -= b
Definition at line 548 of file pprz_algebra_float.h.
|
inlinestatic |
o = a + b
Definition at line 520 of file pprz_algebra_float.h.
Referenced by runge_kutta_4_float().
Here is the caller graph for this function:
|
inlinestatic |
a = 0
Definition at line 506 of file pprz_algebra_float.h.
Referenced by invariant_model(), and pprz_polyfit_float().
Here is the caller graph for this function: 1.8.8
1.8.8