|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Zamboni pattern survey for fixedwings. More...
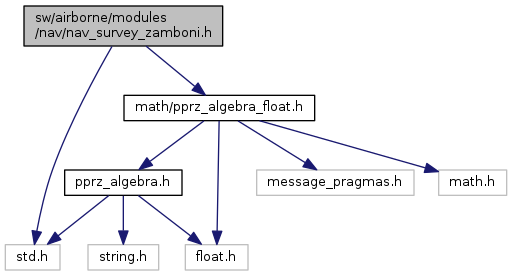
 Include dependency graph for nav_survey_zamboni.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_survey_zamboni.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ZamboniSurvey |
Enumerations | |
| enum | z_survey_stage { Z_ERR, Z_ENTRY, Z_SEG, Z_TURN1, Z_RET, Z_TURN2 } |
Functions | |
| bool | nav_survey_zamboni_setup (uint8_t center_wp, uint8_t dir_wp, float sweep_length, float sweep_spacing, int sweep_lines, float altitude) |
| initializes the variables needed for the survey to start. More... | |
| bool | nav_survey_zamboni_run (void) |
| main navigation routine. More... | |
Zamboni pattern survey for fixedwings.
Definition in file nav_survey_zamboni.h.
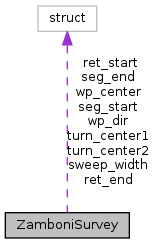
| struct ZamboniSurvey |
Definition at line 36 of file nav_survey_zamboni.h.
Collaboration diagram for ZamboniSurvey:| Data Fields | ||
|---|---|---|
| float | altitude | |
| int | current_laps | |
| float | flight_angle | in degrees |
| int | pre_leave_angle |
in degrees. Leave turncircles a small angle before the 180deg turns are completed to get a smoother transition to flight-lines |
| struct FloatVect2 | ret_end | |
| struct FloatVect2 | ret_start | |
| float | return_angle | in degrees |
| struct FloatVect2 | seg_end | |
| struct FloatVect2 | seg_start | |
| z_survey_stage | stage | z_stage starts at ENTRY and than circles trought the other states until to rectangle is completely covered ENTRY : getting in the right position and height for the first flyover SEG : fly from seg_start to seg_end and take pictures, then calculate navigation points of next flyover TURN1 : do a 180° turn around seg_center1 RET : fly from ret_start to ret_end TURN2 : do a 180° turn around seg_center2 |
| struct FloatVect2 | sweep_width | |
| int | total_laps | |
| struct FloatVect2 | turn_center1 | |
| struct FloatVect2 | turn_center2 | |
| float | turnradius1 | |
| float | turnradius2 | |
| struct FloatVect2 | wp_center | |
| struct FloatVect2 | wp_dir | |
| enum z_survey_stage |
| Enumerator | |
|---|---|
| Z_ERR | |
| Z_ENTRY | |
| Z_SEG | |
| Z_TURN1 | |
| Z_RET | |
| Z_TURN2 | |
Definition at line 34 of file nav_survey_zamboni.h.
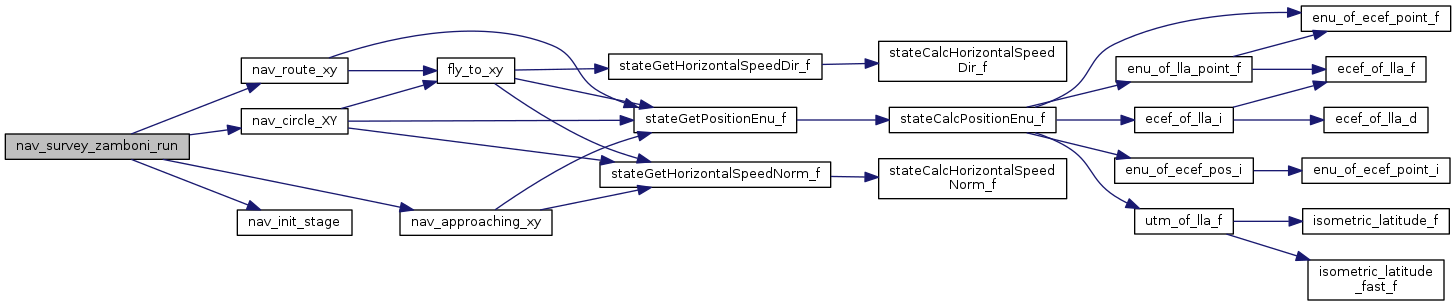
| bool nav_survey_zamboni_run | ( | void | ) |
main navigation routine.
This is called periodically evaluates the current Position and stage and navigates accordingly.
Definition at line 131 of file nav_survey_zamboni.c.
References ZamboniSurvey::altitude, CARROT, ZamboniSurvey::current_laps, ZamboniSurvey::flight_angle, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_xy(), nav_circle_XY(), nav_init_stage(), nav_route_xy(), NavCourseCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, ZamboniSurvey::pre_leave_angle, ZamboniSurvey::ret_end, ZamboniSurvey::ret_start, ZamboniSurvey::return_angle, ZamboniSurvey::seg_end, ZamboniSurvey::seg_start, ZamboniSurvey::stage, ZamboniSurvey::sweep_width, ZamboniSurvey::total_laps, ZamboniSurvey::turn_center1, ZamboniSurvey::turn_center2, ZamboniSurvey::turnradius1, ZamboniSurvey::turnradius2, VECT2_ADD, ZamboniSurvey::wp_center, FloatVect2::x, FloatVect2::y, Z_ENTRY, Z_RET, Z_SEG, Z_TURN1, Z_TURN2, and zs.
Here is the call graph for this function:| bool nav_survey_zamboni_setup | ( | uint8_t | center_wp, |
| uint8_t | dir_wp, | ||
| float | sweep_length, | ||
| float | sweep_spacing, | ||
| int | sweep_lines, | ||
| float | altitude | ||
| ) |
initializes the variables needed for the survey to start.
| center_wp | the waypoint defining the center of the survey-rectangle |
| dir_wp | the waypoint defining the orientation of the survey-rectangle |
| sweep_length | the length of the survey-rectangle |
| sweep_spacing | distance between the sweeps |
| sweep_lines | number of sweep_lines to fly |
| altitude | the altitude that must be reached before the flyover starts |
Definition at line 57 of file nav_survey_zamboni.c.
References ZamboniSurvey::altitude, altitude, ZamboniSurvey::current_laps, ZamboniSurvey::flight_angle, FLOAT_VECT2_NORMALIZE, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, ZamboniSurvey::pre_leave_angle, ZamboniSurvey::ret_end, ZamboniSurvey::ret_start, ZamboniSurvey::return_angle, ZamboniSurvey::seg_end, ZamboniSurvey::seg_start, ZamboniSurvey::stage, ZamboniSurvey::sweep_width, ZamboniSurvey::total_laps, ZamboniSurvey::turn_center1, ZamboniSurvey::turn_center2, ZamboniSurvey::turnradius1, ZamboniSurvey::turnradius2, VECT2_COPY, VECT2_DIFF, VECT2_SMUL, VECT2_SUM, waypoints, ZamboniSurvey::wp_center, ZamboniSurvey::wp_dir, FloatVect2::x, FloatVect2::y, Z_ENTRY, and zs.
 1.8.8
1.8.8