|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
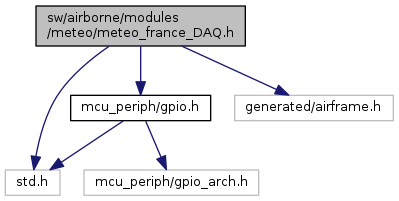
Communication module with the Data Acquisition board from Meteo France. More...
 Include dependency graph for meteo_france_DAQ.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for meteo_france_DAQ.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | MF_DAQ |
Macros | |
| #define | MF_DAQ_SIZE 32 |
| #define | meteo_france_DAQ_SetPower(_x) {} |
Functions | |
| void | init_mf_daq (void) |
| void | mf_daq_send_state (void) |
| void | mf_daq_send_report (void) |
| void | parse_mf_daq_msg (void) |
Variables | |
| struct MF_DAQ | mf_daq |
Communication module with the Data Acquisition board from Meteo France.
DAQ board sends measurments to the AP AP sends periodic report to the ground, store data on SD card and sends A/C state to DAQ board
Definition in file meteo_france_DAQ.h.
| struct MF_DAQ |
Definition at line 43 of file meteo_france_DAQ.h.
| Data Fields | ||
|---|---|---|
| uint8_t | nb | |
| uint8_t | power | |
| float | values[MF_DAQ_SIZE] | |
| #define meteo_france_DAQ_SetPower | ( | _x | ) | {} |
Definition at line 63 of file meteo_france_DAQ.h.
Referenced by init_mf_daq().
| #define MF_DAQ_SIZE 32 |
Definition at line 41 of file meteo_france_DAQ.h.
Referenced by parse_mf_daq_msg().
| void init_mf_daq | ( | void | ) |
Definition at line 56 of file meteo_france_DAQ.c.
References gpio_setup_output(), log_started, meteo_france_DAQ_SetPower, mf_daq, MF_DAQ_POWER_INIT, MF_DAQ::nb, and MF_DAQ::power.
Here is the call graph for this function:| void mf_daq_send_report | ( | void | ) |
Definition at line 91 of file meteo_france_DAQ.c.
References course, GpsState::course, DefaultChannel, DefaultDevice, UtmCoor_f::east, FALSE, GpsState::fix, foo, gps, GpsState::gspeed, GpsState::hmsl, log_started, mf_daq, MF_DAQ::nb, GpsState::ned_vel, UtmCoor_f::north, pprzLogFile, stateGetPositionUtm_f(), GpsState::tow, MF_DAQ::values, GpsState::week, NedCoor_i::z, and UtmCoor_f::zone.
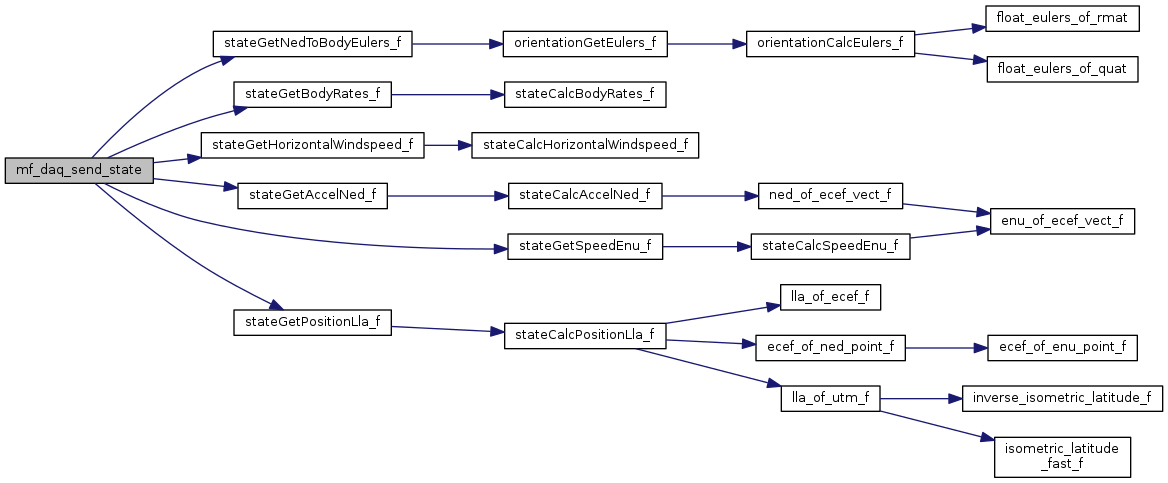
Here is the call graph for this function:| void mf_daq_send_state | ( | void | ) |
Definition at line 67 of file meteo_france_DAQ.c.
References autopilot_flight_time, extra_pprz_tp, p, stateGetAccelNed_f(), stateGetBodyRates_f(), stateGetHorizontalWindspeed_f(), stateGetNedToBodyEulers_f(), stateGetPositionLla_f(), and stateGetSpeedEnu_f().
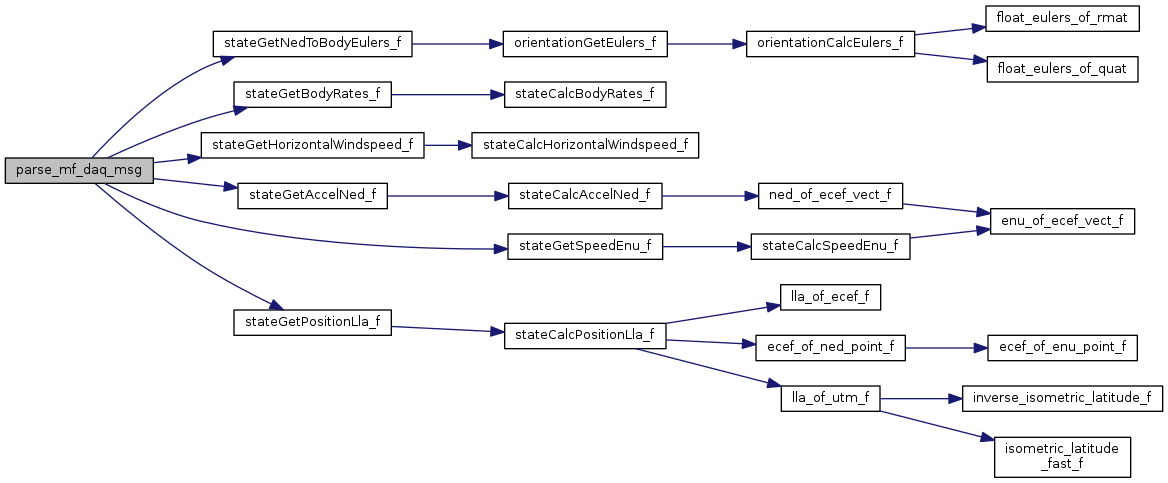
Here is the call graph for this function:| void parse_mf_daq_msg | ( | void | ) |
Definition at line 117 of file meteo_france_DAQ.c.
References UtmCoor_f::alt, autopilot_flight_time, dl_buffer, log_started, mf_daq, MF_DAQ_SIZE, MF_DAQ::nb, p, stateGetAccelNed_f(), stateGetBodyRates_f(), stateGetHorizontalWindspeed_f(), stateGetNedToBodyEulers_f(), stateGetPositionLla_f(), stateGetSpeedEnu_f(), and MF_DAQ::values.
Here is the call graph for this function:| struct MF_DAQ mf_daq |
Definition at line 45 of file meteo_france_DAQ.c.
Referenced by init_mf_daq(), mf_daq_send_report(), and parse_mf_daq_msg().
 1.8.8
1.8.8