|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
INS for rotorcrafts combining vertical and horizontal filters. More...
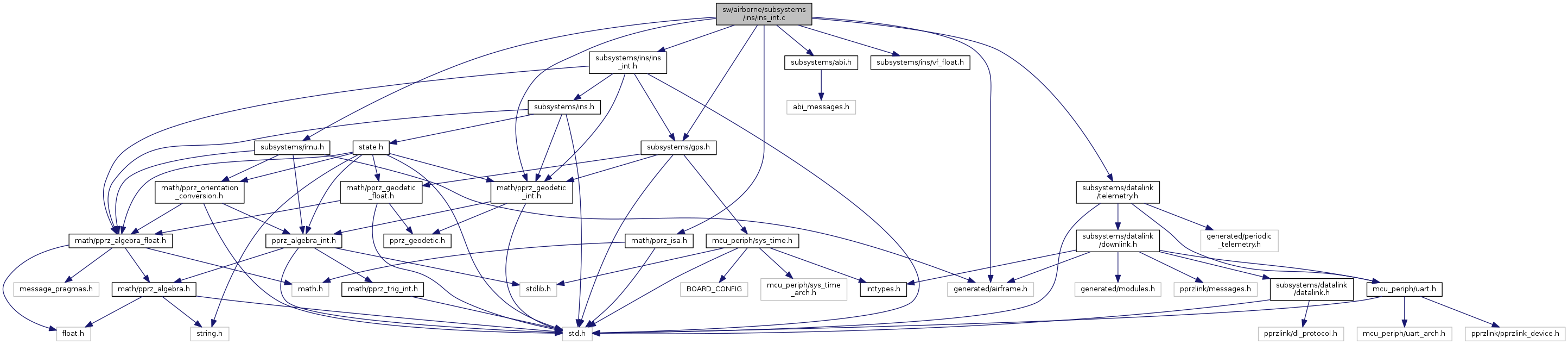
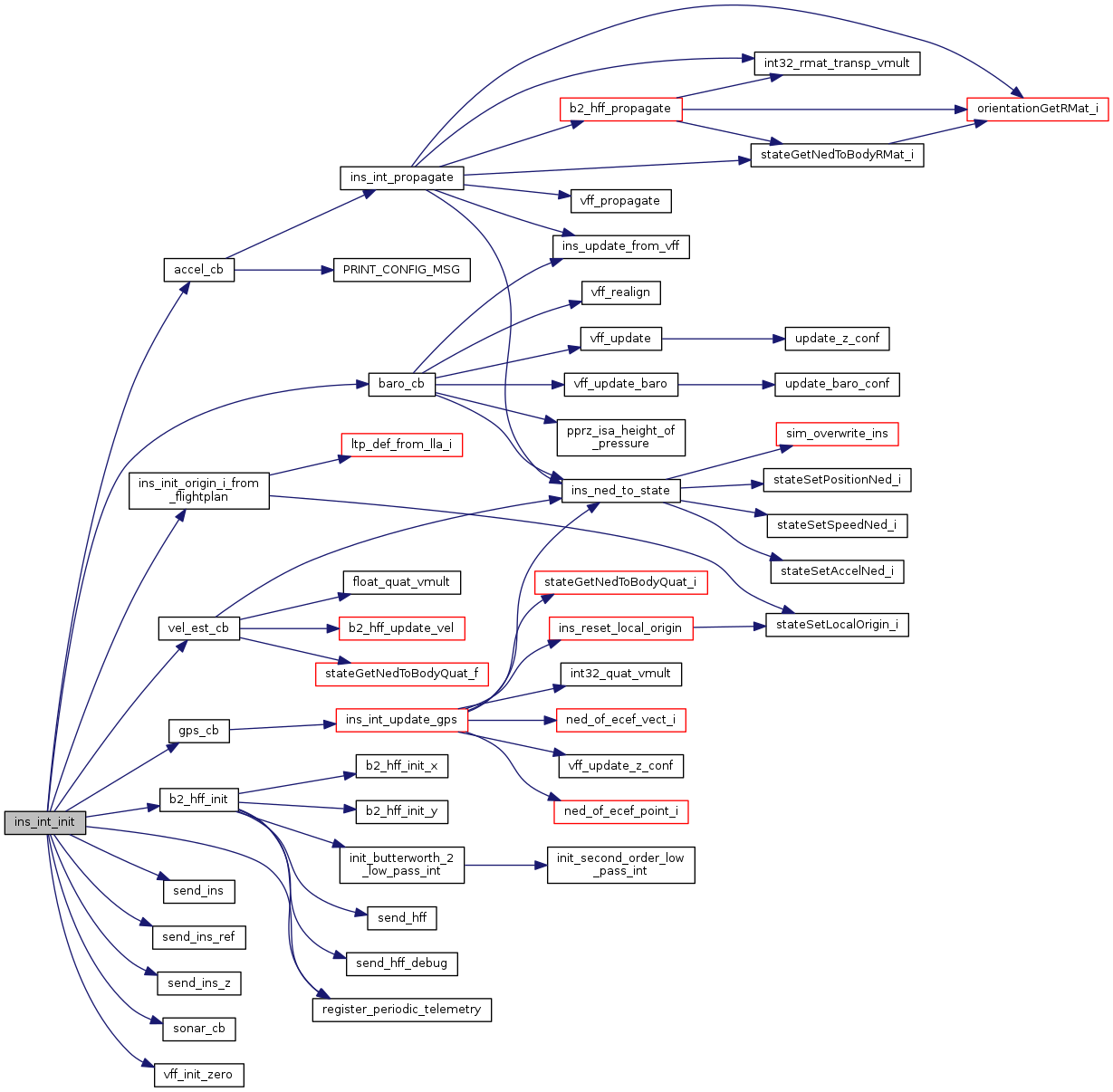
#include "subsystems/ins/ins_int.h"#include "subsystems/abi.h"#include "subsystems/imu.h"#include "subsystems/gps.h"#include "generated/airframe.h"#include "subsystems/ins/vf_float.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_isa.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for ins_int.c:
Include dependency graph for ins_int.c:Go to the source code of this file.
Macros | |
| #define | INS_VFF_R_GPS 2.0 |
| #define | INS_VFF_VZ_R_GPS 2.0 |
| #define | INS_MAX_PROPAGATION_STEPS 200 |
| maximum number of propagation steps without any updates in between More... | |
| #define | USE_INS_NAV_INIT TRUE |
| #define | INS_INT_BARO_ID ABI_BROADCAST |
| default barometer to use in INS More... | |
| #define | INS_INT_IMU_ID ABI_BROADCAST |
| ABI binding for IMU data. More... | |
| #define | INS_INT_GPS_ID GPS_MULTI_ID |
| #define | INS_INT_VEL_ID ABI_BROADCAST |
| ABI binding for VELOCITY_ESTIMATE. More... | |
Functions | |
| static void | baro_cb (uint8_t sender_id, float pressure) |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| static void | vel_est_cb (uint8_t sender_id, uint32_t stamp, float x, float y, float z, float noise) |
| static void | send_ins (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ins_z (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ins_ref (struct transport_tx *trans, struct link_device *dev) |
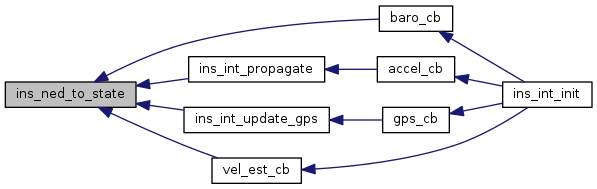
| static void | ins_ned_to_state (void) |
| copy position and speed to state interface More... | |
| static void | ins_update_from_vff (void) |
| update ins state from vertical filter More... | |
| void | ins_int_init (void) |
| void | ins_reset_local_origin (void) |
| INS local origin reset. More... | |
| void | ins_reset_altitude_ref (void) |
| INS altitude reference reset. More... | |
| void | ins_int_propagate (struct Int32Vect3 *accel, float dt) |
| void | ins_int_update_gps (struct GpsState *gps_s) |
Variables | |
| abi_event | baro_ev |
| static abi_event | accel_ev |
| static abi_event | gps_ev |
| static abi_event | vel_est_ev |
| struct InsInt | ins_int |
| global INS state More... | |
INS for rotorcrafts combining vertical and horizontal filters.
Definition in file ins_int.c.
| #define INS_INT_BARO_ID ABI_BROADCAST |
default barometer to use in INS
Definition at line 120 of file ins_int.c.
Referenced by ins_int_init().
| #define INS_INT_GPS_ID GPS_MULTI_ID |
Definition at line 137 of file ins_int.c.
Referenced by ins_int_init().
| #define INS_INT_IMU_ID ABI_BROADCAST |
ABI binding for IMU data.
Used accel ABI messages.
Definition at line 131 of file ins_int.c.
Referenced by ins_int_init().
| #define INS_INT_VEL_ID ABI_BROADCAST |
ABI binding for VELOCITY_ESTIMATE.
Usually this is coming from opticflow.
Definition at line 146 of file ins_int.c.
Referenced by ins_int_init().
| #define INS_MAX_PROPAGATION_STEPS 200 |
maximum number of propagation steps without any updates in between
Definition at line 107 of file ins_int.c.
Referenced by ins_int_init(), and ins_int_propagate().
| #define INS_VFF_R_GPS 2.0 |
Definition at line 97 of file ins_int.c.
Referenced by ins_int_update_gps().
| #define INS_VFF_VZ_R_GPS 2.0 |
Definition at line 101 of file ins_int.c.
Referenced by ins_int_update_gps().
|
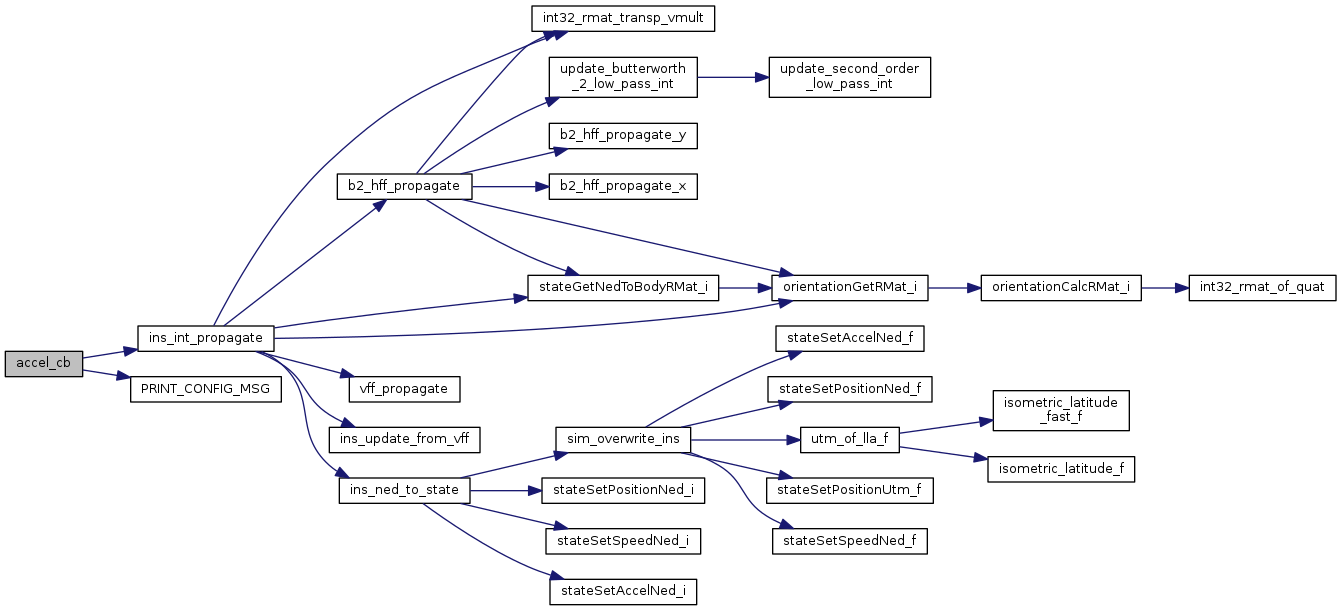
static |
Definition at line 492 of file ins_int.c.
References dt, ins_int_propagate(), and PRINT_CONFIG_MSG().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
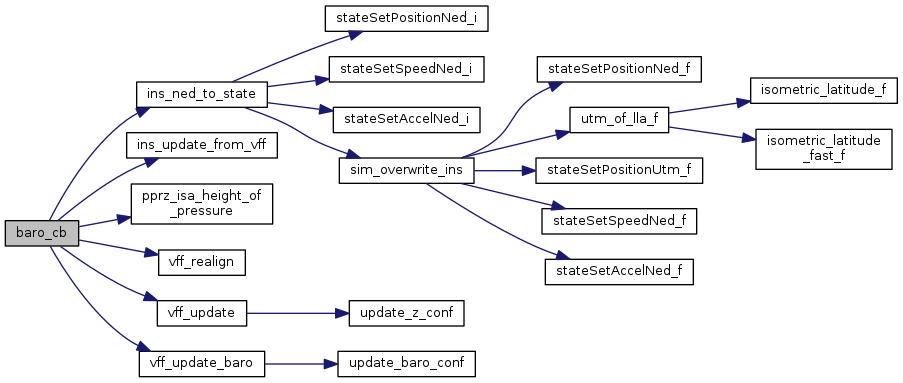
static |
Definition at line 319 of file ins_int.c.
References InsInt::baro_initialized, InsInt::baro_z, ins_int, ins_ned_to_state(), ins_update_from_vff(), pprz_isa_height_of_pressure(), InsInt::propagation_cnt, InsInt::qfe, InsInt::vf_reset, vff_realign(), vff_update(), and vff_update_baro().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 506 of file ins_int.c.
References ins_int_update_gps().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_int_init | ( | void | ) |
Definition at line 188 of file ins_int.c.
References accel_cb(), b2_hff_init(), baro_cb(), InsInt::baro_initialized, DefaultPeriodic, gps_cb(), InsInt::hf_realign, ins_init_origin_i_from_flightplan(), ins_int, INS_INT_BARO_ID, INS_INT_GPS_ID, INS_INT_IMU_ID, INS_INT_VEL_ID, INS_MAX_PROPAGATION_STEPS, INT32_VECT3_ZERO, InsInt::ltp_accel, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::ltp_pos, InsInt::ltp_speed, InsInt::propagation_cnt, register_periodic_telemetry(), send_ins(), send_ins_ref(), send_ins_z(), sonar_cb(), vel_est_cb(), InsInt::vf_reset, and vff_init_zero().
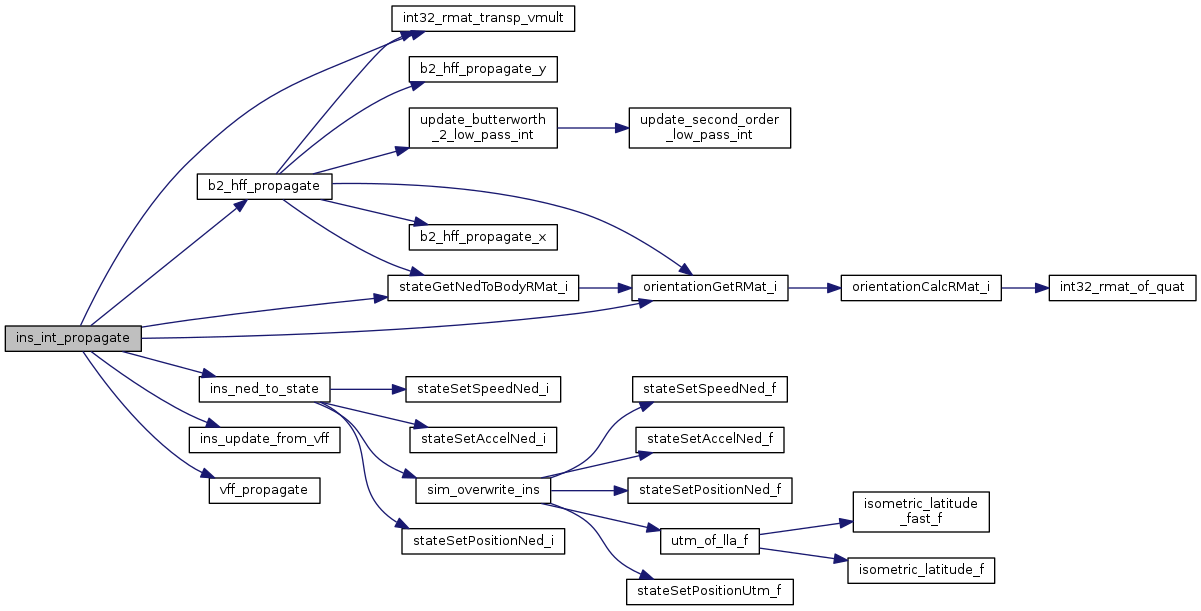
Here is the call graph for this function:| void ins_int_propagate | ( | struct Int32Vect3 * | accel, |
| float | dt | ||
| ) |
Definition at line 275 of file ins_int.c.
References ACCEL_BFP_OF_REAL, ACCEL_FLOAT_OF_BFP, b2_hff_propagate(), Imu::body_to_imu, imu, ins_int, INS_MAX_PROPAGATION_STEPS, ins_ned_to_state(), ins_update_from_vff(), int32_rmat_transp_vmult(), InsInt::ltp_accel, orientationGetRMat_i(), InsInt::propagation_cnt, stateGetNedToBodyRMat_i(), vff_propagate(), NedCoor_i::x, Int32Vect3::x, NedCoor_i::y, Int32Vect3::y, NedCoor_i::z, and Int32Vect3::z.
Referenced by accel_cb().
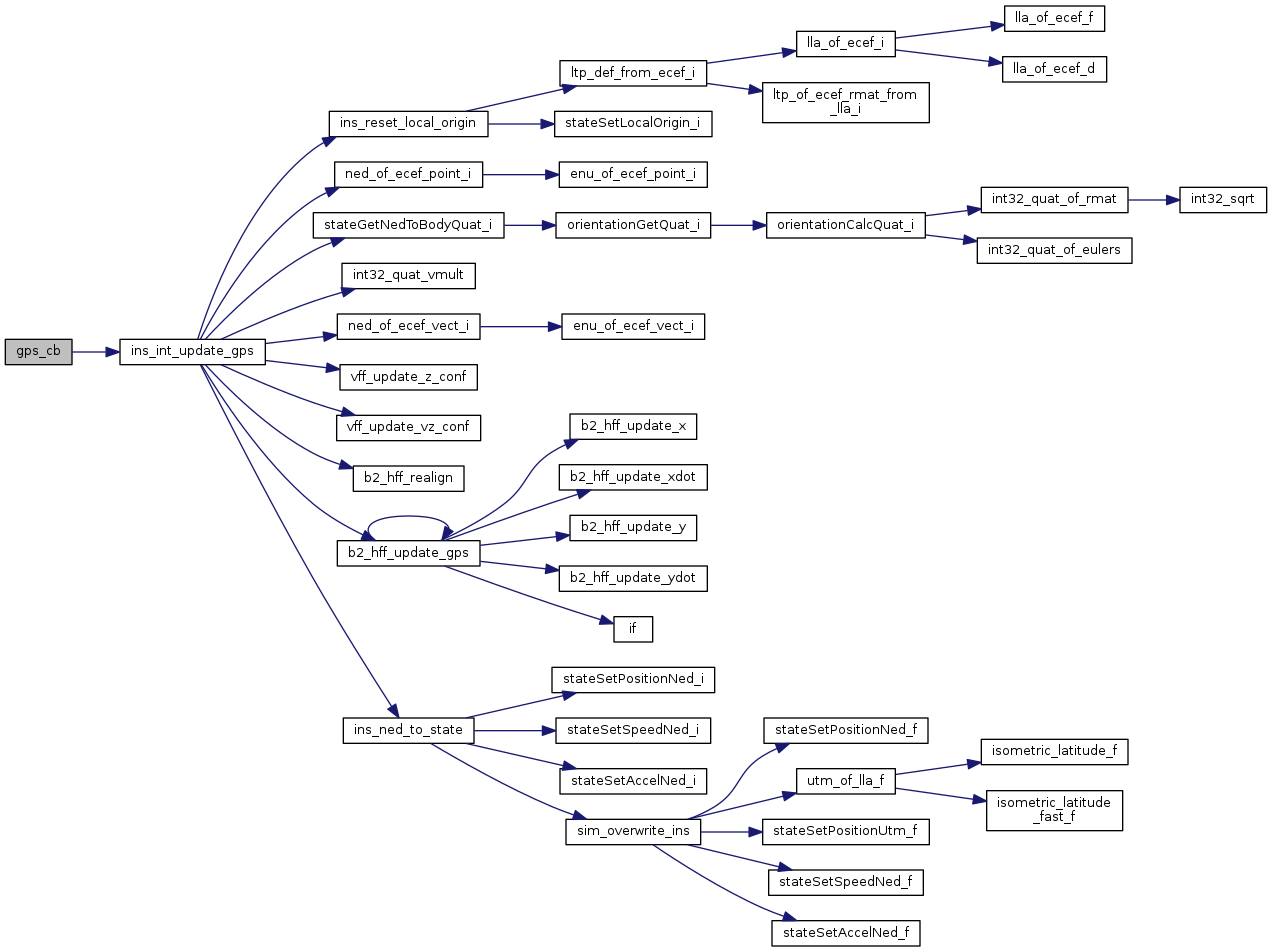
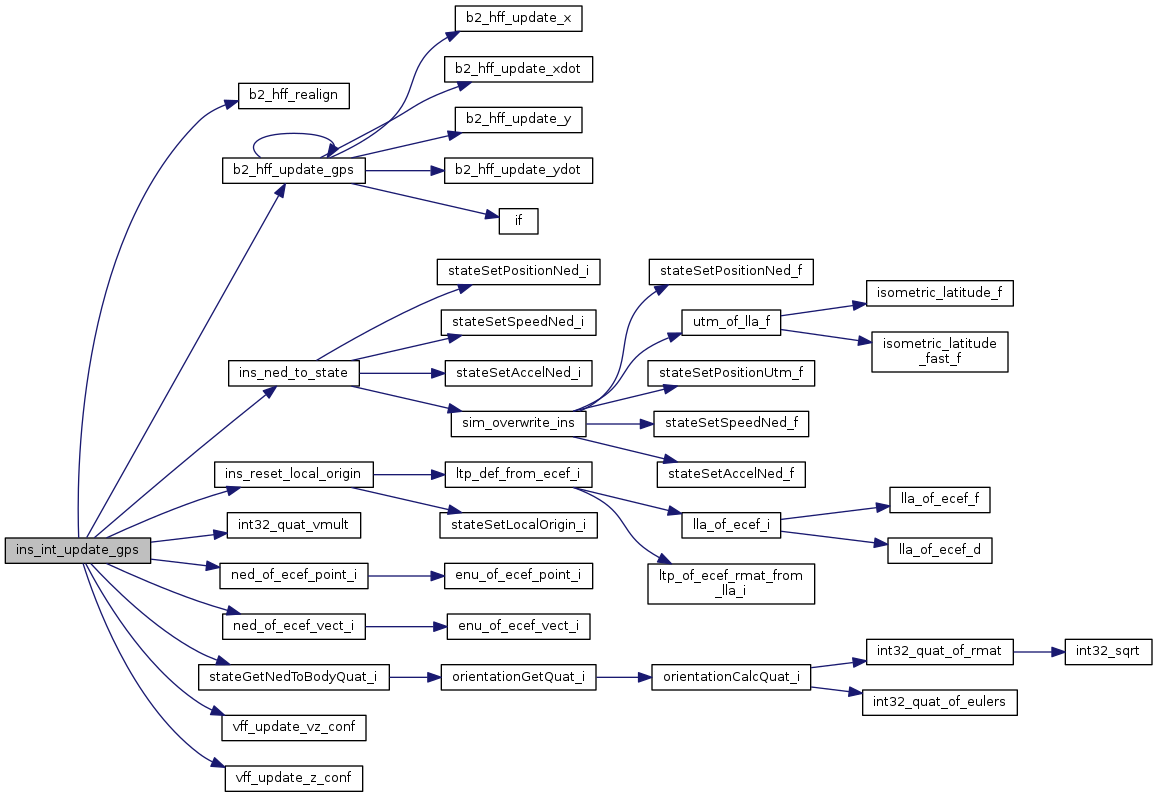
Here is the call graph for this function: Here is the caller graph for this function:| void ins_int_update_gps | ( | struct GpsState * | gps_s | ) |
Definition at line 349 of file ins_int.c.
References b2_hff_realign(), b2_hff_update_gps(), GpsState::ecef_pos, GpsState::ecef_vel, GpsState::fix, GPS_FIX_3D, InsInt::hf_realign, ins_int, ins_ned_to_state(), ins_reset_local_origin(), INS_VFF_R_GPS, INS_VFF_VZ_R_GPS, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, int32_quat_vmult(), INT32_SPEED_OF_CM_S_DEN, INT32_SPEED_OF_CM_S_NUM, INT32_VECT2_SCALE_2, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::ltp_pos, InsInt::ltp_speed, ned_of_ecef_point_i(), ned_of_ecef_vect_i(), InsInt::propagation_cnt, QUAT_INVERT, stateGetNedToBodyQuat_i(), VECT2_ASSIGN, VECT2_SDIV, VECT3_SUB, vff_update_vz_conf(), vff_update_z_conf(), NedCoor_i::x, Int32Vect3::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
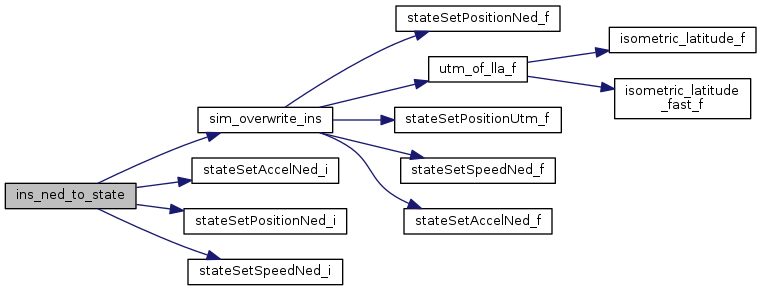
static |
copy position and speed to state interface
Definition at line 457 of file ins_int.c.
References ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, nps_bypass_ins, sim_overwrite_ins(), stateSetAccelNed_i(), stateSetPositionNed_i(), and stateSetSpeedNed_i().
Referenced by baro_cb(), ins_int_propagate(), ins_int_update_gps(), and vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_altitude_ref | ( | void | ) |
INS altitude reference reset.
Reset only vertical reference to the current altitude. Does nothing if not implemented by specific INS algorithm.
Definition at line 260 of file ins_int.c.
References LlaCoor_i::alt, gps, GpsState::hmsl, LtpDef_i::hmsl, ins_int, LlaCoor_i::lat, LtpDef_i::lla, GpsState::lla_pos, LlaCoor_i::lon, InsInt::ltp_def, ltp_def_from_lla_i(), State::ned_origin_i, state, stateSetLocalOrigin_i(), and InsInt::vf_reset.
Here is the call graph for this function:| void ins_reset_local_origin | ( | void | ) |
INS local origin reset.
Reset horizontal and vertical reference to the current position. Does nothing if not implemented by specific INS algorithm.
INS local origin reset.
Definition at line 238 of file ins_int.c.
References LlaCoor_i::alt, GpsState::ecef_pos, gps, GpsFixValid, InsInt::hf_realign, GpsState::hmsl, LtpDef_i::hmsl, ins_int, LtpDef_i::lla, GpsState::lla_pos, InsInt::ltp_def, ltp_def_from_ecef_i(), InsInt::ltp_initialized, stateSetLocalOrigin_i(), and InsInt::vf_reset.
Referenced by ins_int_update_gps().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
update ins state from vertical filter
Definition at line 471 of file ins_int.c.
References ACCEL_BFP_OF_REAL, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, POS_BFP_OF_REAL, SPEED_BFP_OF_REAL, vff, VffExtended::z, NedCoor_i::z, VffExtended::zdot, and VffExtended::zdotdot.
Referenced by baro_cb(), and ins_int_propagate().
Here is the caller graph for this function:
|
static |
Definition at line 156 of file ins_int.c.
References ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
|
static |
Definition at line 170 of file ins_int.c.
References LlaCoor_i::alt, LtpDef_i::ecef, LtpDef_i::hmsl, ins_int, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, InsInt::ltp_def, InsInt::ltp_initialized, InsInt::qfe, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
|
static |
Definition at line 164 of file ins_int.c.
References InsInt::baro_z, ins_int, InsInt::ltp_accel, InsInt::ltp_pos, InsInt::ltp_speed, and NedCoor_i::z.
Referenced by ins_int_init().
Here is the caller graph for this function:
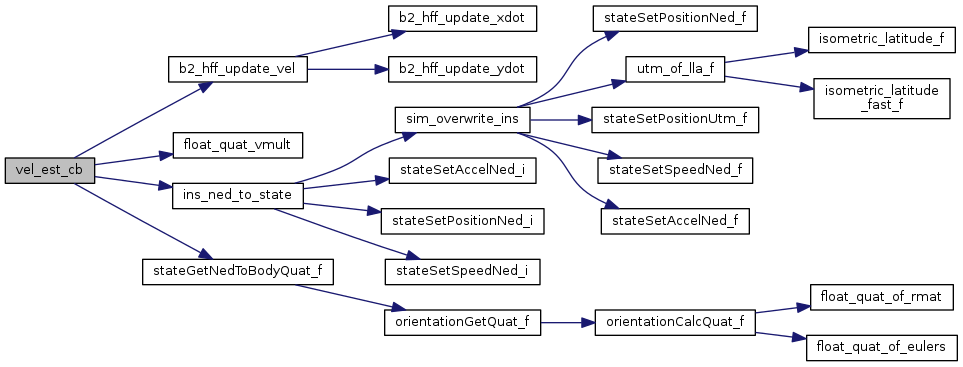
|
static |
Definition at line 513 of file ins_int.c.
References b2_hff_update_vel(), dt, float_quat_vmult(), ins_int, ins_ned_to_state(), InsInt::ltp_pos, InsInt::ltp_speed, POS_BFP_OF_REAL, InsInt::propagation_cnt, QUAT_INVERT, SPEED_BFP_OF_REAL, stateGetNedToBodyQuat_f(), FloatVect3::x, NedCoor_i::x, FloatVect3::y, and NedCoor_i::y.
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:| struct InsInt ins_int |
global INS state
Definition at line 151 of file ins_int.c.
Referenced by baro_cb(), ins_int_init(), ins_int_propagate(), ins_int_update_gps(), ins_ned_to_state(), ins_reset_altitude_ref(), ins_reset_local_origin(), ins_update_from_vff(), send_ins(), send_ins_ref(), send_ins_z(), and vel_est_cb().
 1.8.8
1.8.8