|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
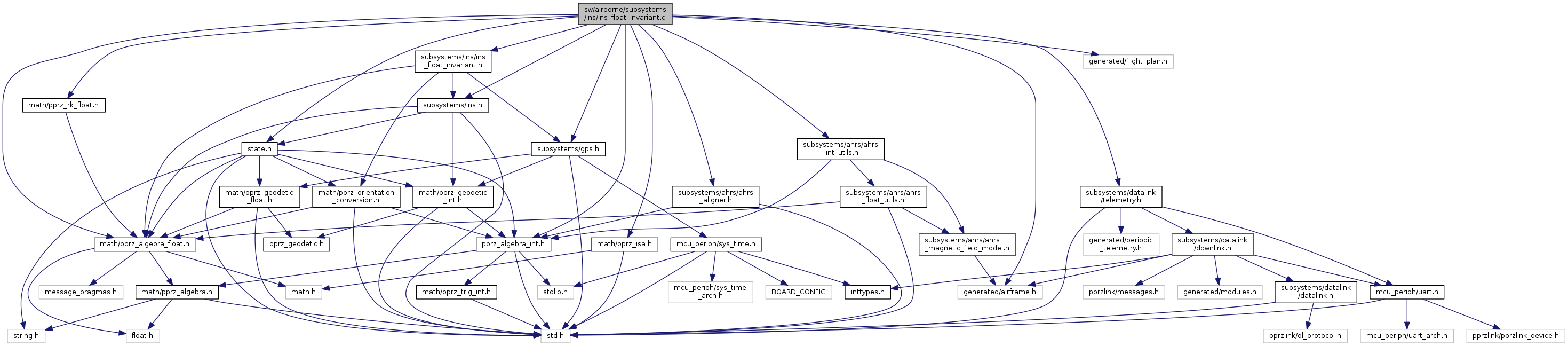
#include "subsystems/ins/ins_float_invariant.h"#include "subsystems/ahrs/ahrs_int_utils.h"#include "subsystems/ahrs/ahrs_aligner.h"#include "subsystems/ins.h"#include "subsystems/gps.h"#include "generated/airframe.h"#include "generated/flight_plan.h"#include "math/pprz_algebra_float.h"#include "math/pprz_algebra_int.h"#include "math/pprz_rk_float.h"#include "math/pprz_isa.h"#include "state.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for ins_float_invariant.c:
Include dependency graph for ins_float_invariant.c:Go to the source code of this file.
Macros | |
| #define | INS_INV_LV 2. |
| #define | INS_INV_LB 6. |
| #define | INS_INV_MV 8. |
| #define | INS_INV_MVZ 15. |
| #define | INS_INV_MH 0.2 |
| #define | INS_INV_NX 0.8 |
| #define | INS_INV_NXZ 0.5 |
| #define | INS_INV_NH 1.2 |
| #define | INS_INV_OV 1.2 |
| #define | INS_INV_OB 1. |
| #define | INS_INV_RV 4. |
| #define | INS_INV_RH 8. |
| #define | INS_INV_SH 0.01 |
| #define | B ins_float_inv.mag_h |
| #define | MAG_FROZEN_COUNT 30 |
Functions | |
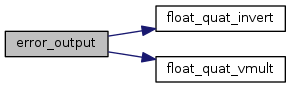
| static void | error_output (struct InsFloatInv *_ins) |
| Compute correction vectors E = ( ŷ - y ) LE, ME, NE, OE : ( gain matrix * error ) More... | |
| static void | invariant_model (float *o, const float *x, const int n, const float *u, const int m) |
| Compute dynamic mode. More... | |
| void | float_quat_vmul_right (struct FloatQuat *mright, const struct FloatQuat *q, struct FloatVect3 *vi) |
| Right multiplication by a quaternion. More... | |
| static void | init_invariant_state (void) |
| static void | send_inv_filter (struct transport_tx *trans, struct link_device *dev) |
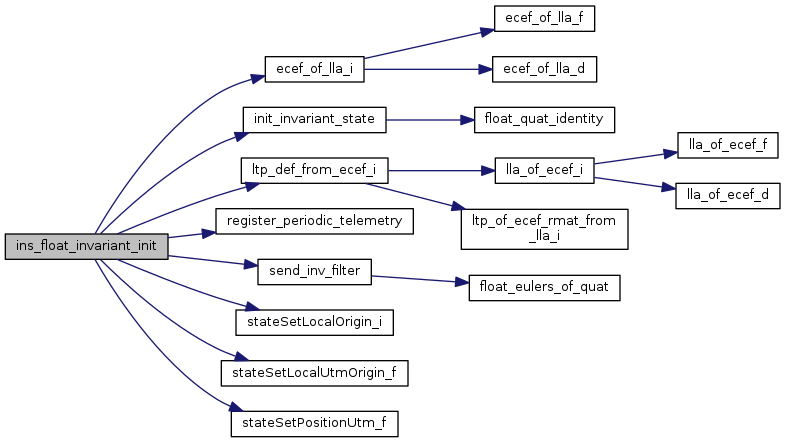
| void | ins_float_invariant_init (void) |
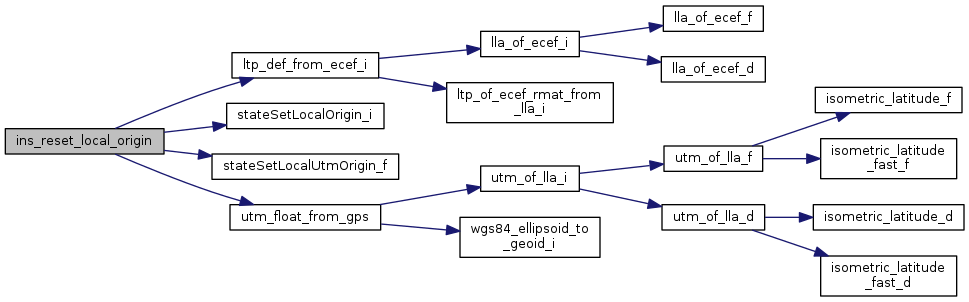
| void | ins_reset_local_origin (void) |
| INS local origin reset. More... | |
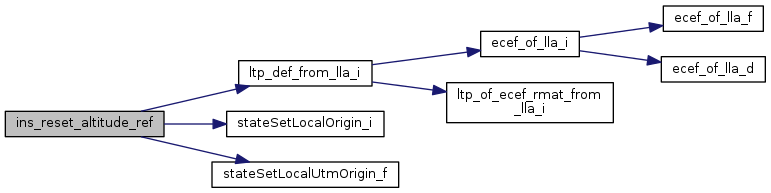
| void | ins_reset_altitude_ref (void) |
| INS altitude reference reset. More... | |
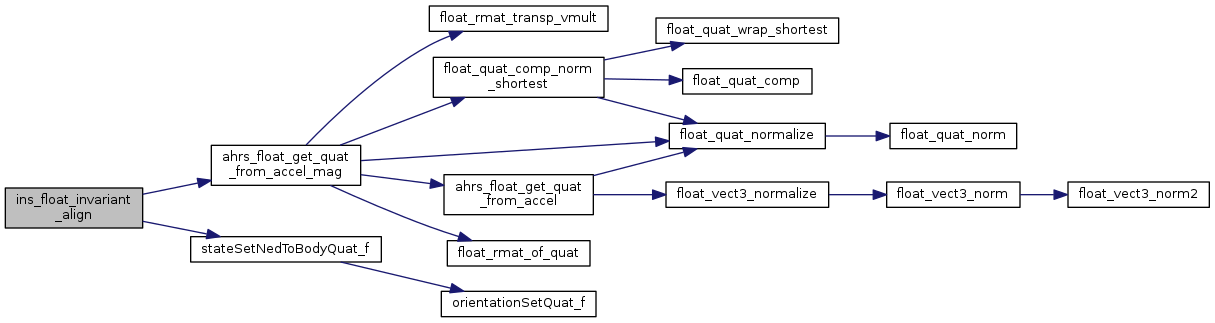
| void | ins_float_invariant_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel, struct FloatVect3 *lp_mag) |
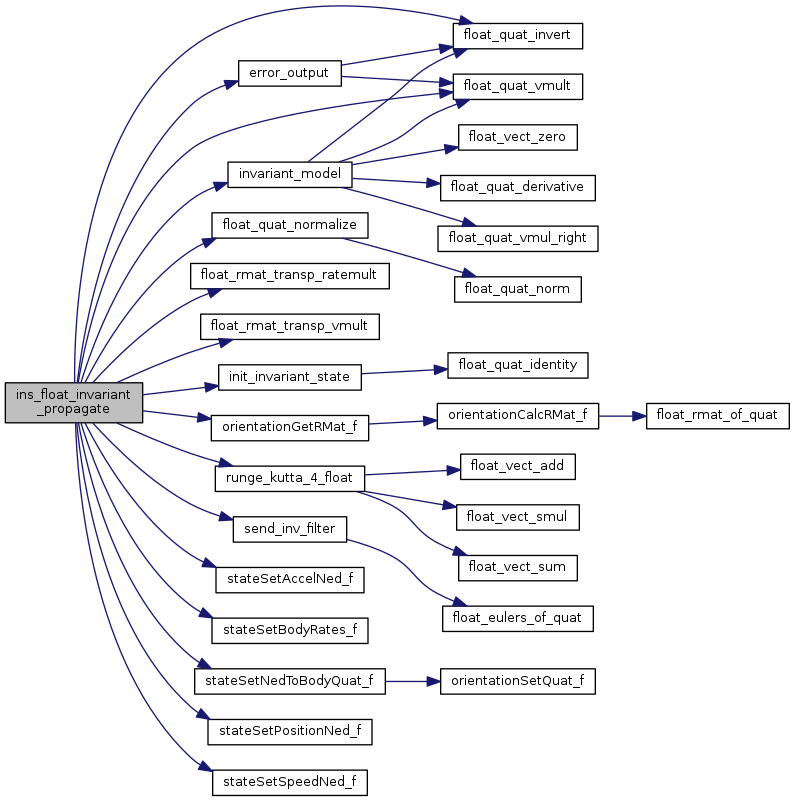
| void | ins_float_invariant_propagate (struct FloatRates *gyro, struct FloatVect3 *accel, float dt) |
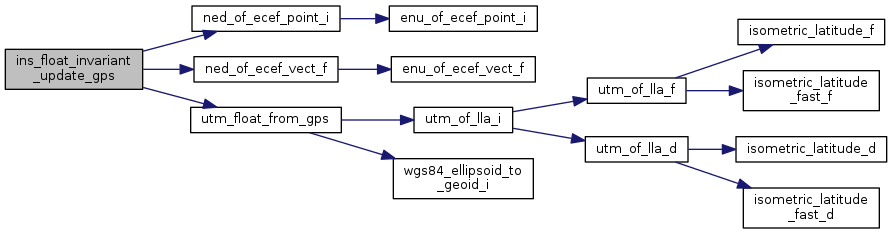
| void | ins_float_invariant_update_gps (struct GpsState *gps_s) |
| void | ins_float_invariant_update_baro (float pressure) |
| void | ins_float_invariant_update_mag (struct FloatVect3 *mag) |
| void | ins_float_inv_set_body_to_imu_quat (struct FloatQuat *q_b2i) |
Variables | |
| struct InsFloatInv | ins_float_inv |
| static const struct FloatVect3 | A = { 0.f, 0.f, 9.81f } |
| bool | ins_baro_initialized |
| bool | ins_gps_fix_once |
INS using invariant filter.
Definition in file ins_float_invariant.c.
| #define B ins_float_inv.mag_h |
Definition at line 145 of file ins_float_invariant.c.
Referenced by error_output(), and ins_float_invariant_init().
| #define INS_INV_LB 6. |
Definition at line 90 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_LV 2. |
Definition at line 86 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_MH 0.2 |
Definition at line 102 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_MV 8. |
Definition at line 94 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_MVZ 15. |
Definition at line 98 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_NH 1.2 |
Definition at line 114 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_NX 0.8 |
Definition at line 106 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_NXZ 0.5 |
Definition at line 110 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_OB 1. |
Definition at line 122 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_OV 1.2 |
Definition at line 118 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_RH 8. |
Definition at line 130 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_RV 4. |
Definition at line 126 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define INS_INV_SH 0.01 |
Definition at line 134 of file ins_float_invariant.c.
Referenced by ins_float_invariant_init().
| #define MAG_FROZEN_COUNT 30 |
Definition at line 488 of file ins_float_invariant.c.
Referenced by ins_float_invariant_update_mag().
|
inlinestatic |
Compute correction vectors E = ( ŷ - y ) LE, ME, NE, OE : ( gain matrix * error )
Definition at line 581 of file ins_float_invariant.c.
References inv_command::accel, inv_state::as, B, inv_measures::baro_alt, InsFloatInv::cmd, InsFloatInv::corr, GpsState::fix, float_quat_invert(), float_quat_vmult(), FLOAT_VECT3_ZERO, InsFloatInv::gains, gps, GPS_FIX_3D, inv_state::hb, ins_float_inv, ins_gps_fix_once, InsFloatInv::is_aligned, inv_gains::lb, inv_correction_gains::LE, inv_gains::lv, inv_measures::mag, inv_correction_gains::ME, InsFloatInv::meas, inv_gains::mh, inv_gains::mv, inv_gains::mvz, inv_correction_gains::NE, State::ned_initialized_f, inv_gains::nh, inv_gains::nx, inv_gains::nxz, inv_gains::ob, inv_correction_gains::OE, inv_gains::ov, inv_state::pos, inv_measures::pos_gps, inv_state::quat, inv_correction_gains::RE, inv_gains::rh, inv_gains::rv, inv_correction_gains::SE, inv_gains::sh, inv_state::speed, inv_measures::speed_gps, state, InsFloatInv::state, State::utm_initialized_f, VECT3_ADD, VECT3_COPY, VECT3_CROSS_PRODUCT, VECT3_DIFF, VECT3_DOT_PRODUCT, VECT3_SMUL, FloatVect3::x, FloatVect3::y, FloatVect3::z, and NedCoor_f::z.
Referenced by ins_float_invariant_propagate().
Here is the call graph for this function: Here is the caller graph for this function:| void float_quat_vmul_right | ( | struct FloatQuat * | mright, |
| const struct FloatQuat * | q, | ||
| struct FloatVect3 * | vi | ||
| ) |
Right multiplication by a quaternion.
vi * q
Definition at line 672 of file ins_float_invariant.c.
References FLOAT_QUAT_EXTRACT, FloatQuat::qi, QUAT_ASSIGN, VECT3_ADD, VECT3_CROSS_PRODUCT, VECT3_DOT_PRODUCT, VECT3_SMUL, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by invariant_model().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 168 of file ins_float_invariant.c.
References inv_state::as, inv_measures::baro_alt, inv_state::bias, float_quat_identity(), FLOAT_RATES_ZERO, FLOAT_VECT3_ZERO, inv_state::hb, ins_baro_initialized, ins_float_inv, ins_gps_fix_once, InsFloatInv::meas, inv_state::pos, inv_measures::pos_gps, inv_state::quat, inv_state::speed, inv_measures::speed_gps, and InsFloatInv::state.
Referenced by ins_float_invariant_init(), and ins_float_invariant_propagate().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_inv_set_body_to_imu_quat | ( | struct FloatQuat * | q_b2i | ) |
Definition at line 686 of file ins_float_invariant.c.
References InsFloatInv::body_to_imu, ins_float_inv, InsFloatInv::is_aligned, orientationSetQuat_f(), inv_state::quat, and InsFloatInv::state.
Referenced by body_to_imu_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_align | ( | struct FloatRates * | lp_gyro, |
| struct FloatVect3 * | lp_accel, | ||
| struct FloatVect3 * | lp_mag | ||
| ) |
Definition at line 305 of file ins_float_invariant.c.
References ahrs_float_get_quat_from_accel_mag(), inv_state::bias, ins_float_inv, InsFloatInv::is_aligned, inv_state::quat, InsFloatInv::state, and stateSetNedToBodyQuat_f().
Referenced by aligner_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_init | ( | void | ) |
Definition at line 215 of file ins_float_invariant.c.
References LlaCoor_i::alt, UtmCoor_f::alt, B, DefaultPeriodic, UtmCoor_f::east, ecef_of_lla_i(), InsFloatInv::gains, LtpDef_i::hmsl, init_invariant_state(), ins_float_inv, INS_INV_LB, INS_INV_LV, INS_INV_MH, INS_INV_MV, INS_INV_MVZ, INS_INV_NH, INS_INV_NX, INS_INV_NXZ, INS_INV_OB, INS_INV_OV, INS_INV_RH, INS_INV_RV, INS_INV_SH, InsFloatInv::is_aligned, LlaCoor_i::lat, inv_gains::lb, LlaCoor_i::lon, ltp_def_from_ecef_i(), inv_gains::lv, inv_gains::mh, inv_gains::mv, inv_gains::mvz, nav_utm_east0, nav_utm_north0, nav_utm_zone0, inv_gains::nh, UtmCoor_f::north, inv_gains::nx, inv_gains::nxz, inv_gains::ob, inv_gains::ov, register_periodic_telemetry(), InsFloatInv::reset, inv_gains::rh, inv_gains::rv, send_inv_filter(), inv_gains::sh, stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), stateSetPositionUtm_f(), and UtmCoor_f::zone.
Referenced by ins_float_invariant_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_propagate | ( | struct FloatRates * | gyro, |
| struct FloatVect3 * | accel, | ||
| float | dt | ||
| ) |
Definition at line 322 of file ins_float_invariant.c.
References inv_command::accel, inv_state::as, inv_measures::baro_alt, inv_state::bias, InsFloatInv::body_to_imu, InsFloatInv::cmd, DefaultChannel, DefaultDevice, error_output(), float_quat_invert(), float_quat_normalize(), float_quat_vmult(), float_rmat_transp_ratemult(), float_rmat_transp_vmult(), inv_state::hb, init_invariant_state(), ins_float_inv, INV_COMMAND_DIM, INV_STATE_DIM, invariant_model(), InsFloatInv::is_aligned, log_started, inv_measures::mag, InsFloatInv::meas, orientationGetRMat_f(), FloatRates::p, inv_state::pos, inv_measures::pos_gps, pprzLogFile, FloatRates::q, FloatQuat::qi, inv_state::quat, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, inv_command::rates, RATES_DIFF, InsFloatInv::reset, runge_kutta_4_float(), send_inv_filter(), inv_state::speed, inv_measures::speed_gps, InsFloatInv::state, stateSetAccelNed_f(), stateSetBodyRates_f(), stateSetNedToBodyQuat_f(), stateSetPositionNed_f(), stateSetSpeedNed_f(), VECT3_ADD, VECT3_SMUL, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_update_baro | ( | float | pressure | ) |
Definition at line 454 of file ins_float_invariant.c.
References alpha, inv_measures::baro_alt, ins_baro_initialized, ins_float_inv, InsFloatInv::meas, and pprz_isa_height_of_pressure().
Referenced by baro_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_update_gps | ( | struct GpsState * | gps_s | ) |
Definition at line 420 of file ins_float_invariant.c.
References UtmCoor_f::alt, UtmCoor_f::east, ECEF_FLOAT_OF_BFP, GpsState::ecef_pos, GpsState::ecef_vel, GpsState::fix, GPS_FIX_3D, ins_float_inv, ins_gps_fix_once, INT32_POS_OF_CM_DEN, INT32_POS_OF_CM_NUM, INT32_VECT3_SCALE_2, InsFloatInv::is_aligned, InsFloatInv::meas, nav_utm_zone0, NED_FLOAT_OF_BFP, State::ned_initialized_f, ned_of_ecef_point_i(), ned_of_ecef_vect_f(), State::ned_origin_f, State::ned_origin_i, GpsState::ned_vel, UtmCoor_f::north, inv_measures::pos_gps, inv_measures::speed_gps, state, utm_float_from_gps(), State::utm_initialized_f, State::utm_origin_f, NedCoor_f::x, NedCoor_i::x, NedCoor_f::y, NedCoor_i::y, NedCoor_f::z, and NedCoor_i::z.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_float_invariant_update_mag | ( | struct FloatVect3 * | mag | ) |
Definition at line 490 of file ins_float_invariant.c.
References InsFloatInv::body_to_imu, float_rmat_transp_vmult(), FLOAT_VECT3_ZERO, ins_float_inv, inv_measures::mag, MAG_FROZEN_COUNT, InsFloatInv::meas, orientationGetRMat_f(), and FloatVect3::x.
Referenced by mag_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_altitude_ref | ( | void | ) |
INS altitude reference reset.
Reset only vertical reference to the current altitude. Does nothing if not implemented by specific INS algorithm.
Definition at line 286 of file ins_float_invariant.c.
References LlaCoor_i::alt, UtmCoor_f::alt, gps, GpsState::hmsl, LtpDef_i::hmsl, LlaCoor_i::lat, LtpDef_i::lla, GpsState::lla_pos, LlaCoor_i::lon, ltp_def_from_lla_i(), State::ned_origin_i, state, stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), and State::utm_origin_f.
Here is the call graph for this function:| void ins_reset_local_origin | ( | void | ) |
INS local origin reset.
Reset horizontal and vertical reference to the current position. Does nothing if not implemented by specific INS algorithm.
INS local origin reset.
Definition at line 272 of file ins_float_invariant.c.
References GpsState::ecef_pos, gps, GpsState::hmsl, LtpDef_i::hmsl, ltp_def_from_ecef_i(), stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), and utm_float_from_gps().
Here is the call graph for this function:
|
inlinestatic |
Compute dynamic mode.
x_dot = evolution_model + (gain_matrix * error)
Definition at line 518 of file ins_float_invariant.c.
References inv_command::accel, inv_state::as, inv_state::bias, InsFloatInv::corr, float_quat_derivative(), float_quat_invert(), FLOAT_QUAT_NORM2, float_quat_vmul_right(), float_quat_vmult(), float_vect_zero(), inv_state::hb, ins_float_inv, inv_correction_gains::LE, inv_correction_gains::ME, inv_correction_gains::NE, inv_correction_gains::OE, inv_state::pos, inv_state::quat, QUAT_ADD, QUAT_SMUL, inv_command::rates, RATES_ASSIGN, RATES_DIFF, inv_correction_gains::RE, inv_correction_gains::SE, inv_state::speed, VECT3_ADD, VECT3_SMUL, VECT3_SUM, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ins_float_invariant_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 189 of file ins_float_invariant.c.
References inv_state::as, inv_measures::baro_alt, inv_state::bias, float_eulers_of_quat(), inv_state::hb, ins_float_inv, InsFloatInv::meas, FloatRates::p, FloatEulers::phi, inv_state::pos, inv_measures::pos_gps, FloatEulers::psi, FloatRates::q, FloatQuat::qi, inv_state::quat, FloatRates::r, inv_state::speed, InsFloatInv::state, FloatEulers::theta, NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by ins_float_invariant_init(), and ins_float_invariant_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 141 of file ins_float_invariant.c.
| bool ins_baro_initialized |
Definition at line 148 of file ins_float_invariant.c.
Referenced by init_invariant_state(), and ins_float_invariant_update_baro().
| struct InsFloatInv ins_float_inv |
Definition at line 138 of file ins_float_invariant.c.
Referenced by aligner_cb(), error_output(), geo_mag_cb(), init_invariant_state(), ins_float_inv_set_body_to_imu_quat(), ins_float_invariant_align(), ins_float_invariant_init(), ins_float_invariant_propagate(), ins_float_invariant_update_baro(), ins_float_invariant_update_gps(), ins_float_invariant_update_mag(), invariant_model(), mag_cb(), send_filter_status(), and send_inv_filter().
| bool ins_gps_fix_once |
Definition at line 151 of file ins_float_invariant.c.
Referenced by error_output(), init_invariant_state(), and ins_float_invariant_update_gps().
 1.8.8
1.8.8