|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
"New" vertical control for fixed wing vehicles. More...
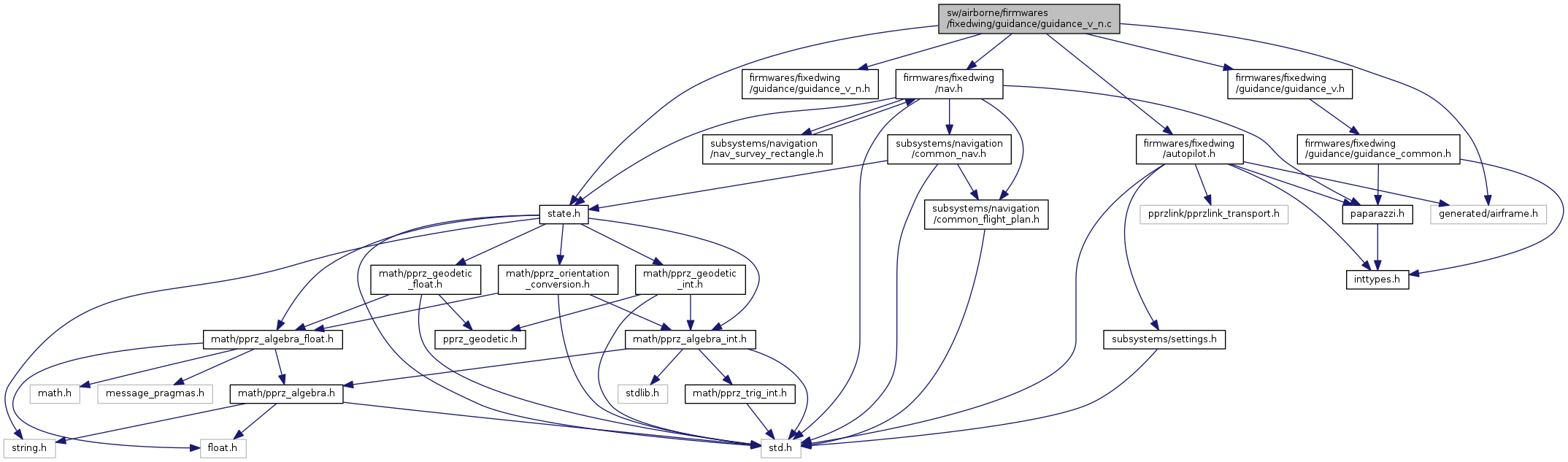
#include "firmwares/fixedwing/guidance/guidance_v.h"#include "firmwares/fixedwing/guidance/guidance_v_n.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "generated/airframe.h"#include "firmwares/fixedwing/autopilot.h" Include dependency graph for guidance_v_n.c:
Include dependency graph for guidance_v_n.c:Go to the source code of this file.
Macros | |
| #define | V_CTL_AUTO_THROTTLE_DGAIN 0. |
| #define | V_CTL_AUTO_THROTTLE_MAX_SUM_ERR 0.4 |
| #define | V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN 0. |
| #define | V_CTL_AUTO_PITCH_MAX_SUM_ERR (RadOfDeg(10.)) |
| #define | V_CTL_AUTO_PITCH_DGAIN 0. |
| #define | V_CTL_AUTO_PITCH_IGAIN 0. |
| #define | V_CTL_PITCH_TRIM 0. |
| #define | V_CTL_AUTO_CLIMB_LIMIT (0.5/4.0) |
| #define | LEAD_CTRL_TAU 0.8 |
| outer loop More... | |
| #define | LEAD_CTRL_A 1. |
| #define | LEAD_CTRL_Te (1./60.) |
| #define | V_CTL_THROTTLE_SLEW (1.) |
Functions | |
| void | v_ctl_init (void) |
| void | v_ctl_altitude_loop (void) |
| outer loop More... | |
| static void | v_ctl_set_pitch (void) |
| static void | v_ctl_set_throttle (void) |
| void | v_ctl_climb_loop (void) |
| Auto-throttle inner loop. More... | |
| void | v_ctl_throttle_slew (void) |
| Computes slewed throttle from throttle setpoint called at 20Hz. More... | |
"New" vertical control for fixed wing vehicles.
Definition in file guidance_v_n.c.
| #define LEAD_CTRL_A 1. |
Definition at line 189 of file guidance_v_n.c.
| #define LEAD_CTRL_TAU 0.8 |
outer loop
Computes v_ctl_climb_setpoint and sets v_ctl_auto_throttle_submode
Definition at line 188 of file guidance_v_n.c.
| #define LEAD_CTRL_Te (1./60.) |
Definition at line 190 of file guidance_v_n.c.
| #define V_CTL_AUTO_CLIMB_LIMIT (0.5/4.0) |
Definition at line 96 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop().
| #define V_CTL_AUTO_PITCH_DGAIN 0. |
Definition at line 79 of file guidance_v_n.c.
Referenced by v_ctl_init().
| #define V_CTL_AUTO_PITCH_IGAIN 0. |
Definition at line 82 of file guidance_v_n.c.
Referenced by v_ctl_init().
| #define V_CTL_AUTO_PITCH_MAX_SUM_ERR (RadOfDeg(10.)) |
Definition at line 76 of file guidance_v_n.c.
Referenced by v_ctl_set_pitch().
| #define V_CTL_AUTO_THROTTLE_DGAIN 0. |
Definition at line 50 of file guidance_v_n.c.
Referenced by v_ctl_init().
| #define V_CTL_AUTO_THROTTLE_MAX_SUM_ERR 0.4 |
Definition at line 63 of file guidance_v_n.c.
Referenced by v_ctl_set_throttle().
| #define V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN 0. |
Definition at line 68 of file guidance_v_n.c.
Referenced by v_ctl_init().
| #define V_CTL_PITCH_TRIM 0. |
Definition at line 90 of file guidance_v_n.c.
Referenced by v_ctl_init().
| #define V_CTL_THROTTLE_SLEW (1.) |
Definition at line 388 of file guidance_v_n.c.
Referenced by v_ctl_throttle_slew().
| void v_ctl_altitude_loop | ( | void | ) |
outer loop
Computes v_ctl_climb_setpoint and sets v_ctl_auto_throttle_submode
Definition at line 192 of file guidance_v_n.c.
References UtmCoor_f::alt, STALL_AIRSPEED, stateGetPositionUtm_f(), v_ctl_altitude_error, V_CTL_ALTITUDE_MAX_CLIMB, v_ctl_altitude_pgain, v_ctl_altitude_pre_climb, v_ctl_altitude_setpoint, v_ctl_auto_airspeed_setpoint, V_CTL_AUTO_CLIMB_LIMIT, v_ctl_climb_setpoint, and v_ctl_max_climb.
Here is the call graph for this function:| void v_ctl_climb_loop | ( | void | ) |
Auto-throttle inner loop.
Definition at line 352 of file guidance_v_n.c.
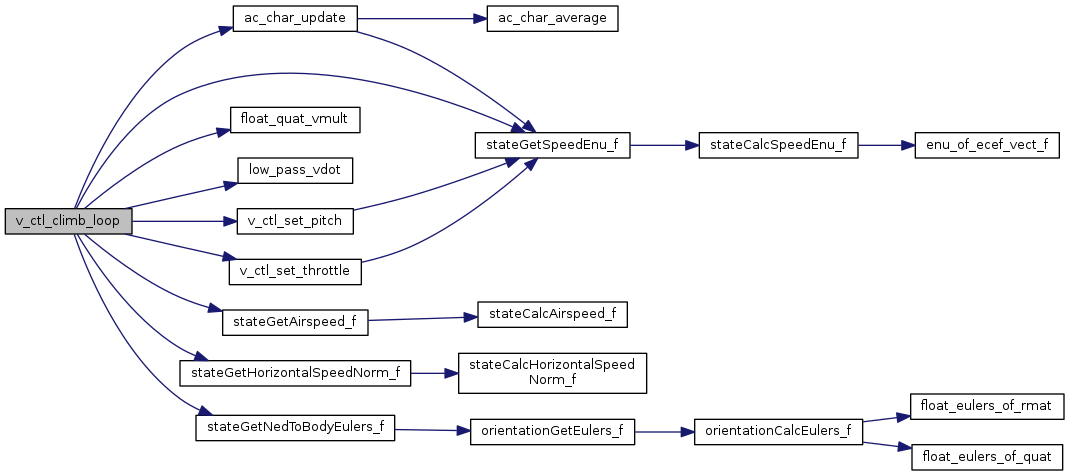
References ac_char_update(), accel_imu_meas, ACCELS_FLOAT_OF_BFP, AIRSPEED_SETPOINT_SLEW, controlled_throttle, dt_attidude, float_quat_vmult(), imu_to_body_quat, kill_throttle, launch, low_pass_vdot(), MAX_PPRZ, nav_pitch, stateGetAirspeed_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), stateGetSpeedEnu_f(), TRIM_UPPRZ, v_ctl_airspeed_pgain, v_ctl_auto_airspeed_controlled, v_ctl_auto_airspeed_setpoint, v_ctl_auto_airspeed_setpoint_slew, v_ctl_auto_groundspeed_igain, V_CTL_AUTO_GROUNDSPEED_MAX_SUM_ERR, v_ctl_auto_groundspeed_pgain, v_ctl_auto_groundspeed_setpoint, v_ctl_auto_groundspeed_sum_err, v_ctl_auto_pitch_of_airspeed_dgain, v_ctl_auto_pitch_of_airspeed_igain, v_ctl_auto_pitch_of_airspeed_pgain, v_ctl_auto_throttle_climb_throttle_increment, v_ctl_auto_throttle_cruise_throttle, v_ctl_auto_throttle_nominal_cruise_pitch, v_ctl_auto_throttle_nominal_cruise_throttle, v_ctl_auto_throttle_of_airspeed_igain, v_ctl_auto_throttle_of_airspeed_pgain, v_ctl_auto_throttle_pitch_of_vz_pgain, v_ctl_climb_setpoint, v_ctl_desired_acceleration, v_ctl_energy_diff_igain, v_ctl_energy_diff_pgain, v_ctl_energy_total_igain, v_ctl_energy_total_pgain, V_CTL_GLIDE_RATIO, v_ctl_max_acceleration, v_ctl_mode, V_CTL_MODE_AUTO_CLIMB, v_ctl_pitch_setpoint, v_ctl_set_pitch(), v_ctl_set_throttle(), V_CTL_SPEED_AIRSPEED, V_CTL_SPEED_GROUNDSPEED, v_ctl_speed_mode, V_CTL_SPEED_THROTTLE, v_ctl_throttle_setpoint, FloatVect3::x, and EnuCoor_f::z.
Here is the call graph for this function:| void v_ctl_init | ( | void | ) |
Definition at line 121 of file guidance_v_n.c.
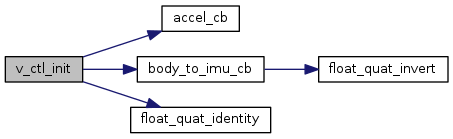
References accel_cb(), body_to_imu_cb(), controlled_throttle, float_quat_identity(), imu_to_body_quat, v_ctl_airspeed_pgain, v_ctl_altitude_error, V_CTL_ALTITUDE_MAX_CLIMB, v_ctl_altitude_pgain, v_ctl_altitude_pre_climb, v_ctl_altitude_setpoint, v_ctl_auto_airspeed_controlled, v_ctl_auto_airspeed_pitch_dgain, v_ctl_auto_airspeed_pitch_igain, v_ctl_auto_airspeed_pitch_pgain, v_ctl_auto_airspeed_pitch_sum_err, v_ctl_auto_airspeed_setpoint, v_ctl_auto_airspeed_setpoint_slew, v_ctl_auto_airspeed_throttle_dgain, v_ctl_auto_airspeed_throttle_igain, v_ctl_auto_airspeed_throttle_pgain, v_ctl_auto_airspeed_throttle_sum_err, v_ctl_auto_groundspeed_igain, v_ctl_auto_groundspeed_pgain, v_ctl_auto_groundspeed_setpoint, v_ctl_auto_groundspeed_sum_err, v_ctl_auto_pitch_dgain, V_CTL_AUTO_PITCH_DGAIN, v_ctl_auto_pitch_igain, V_CTL_AUTO_PITCH_IGAIN, v_ctl_auto_pitch_of_airspeed_dgain, v_ctl_auto_pitch_of_airspeed_igain, v_ctl_auto_pitch_of_airspeed_pgain, v_ctl_auto_pitch_pgain, v_ctl_auto_pitch_sum_err, v_ctl_auto_throttle_climb_throttle_increment, v_ctl_auto_throttle_cruise_throttle, V_CTL_AUTO_THROTTLE_DGAIN, v_ctl_auto_throttle_dgain, v_ctl_auto_throttle_igain, v_ctl_auto_throttle_max_cruise_throttle, v_ctl_auto_throttle_min_cruise_throttle, v_ctl_auto_throttle_nominal_cruise_pitch, v_ctl_auto_throttle_nominal_cruise_throttle, v_ctl_auto_throttle_of_airspeed_igain, v_ctl_auto_throttle_of_airspeed_pgain, v_ctl_auto_throttle_pgain, v_ctl_auto_throttle_pitch_of_vz_dgain, V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN, v_ctl_auto_throttle_pitch_of_vz_pgain, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_auto_throttle_sum_err, v_ctl_climb_mode, V_CTL_CLIMB_MODE_AUTO_THROTTLE, v_ctl_climb_setpoint, v_ctl_energy_diff_igain, v_ctl_energy_diff_pgain, V_CTL_ENERGY_IMU_ID, v_ctl_energy_total_igain, v_ctl_energy_total_pgain, v_ctl_max_acceleration, V_CTL_MAX_ACCELERATION, v_ctl_max_climb, v_ctl_mode, V_CTL_MODE_MANUAL, v_ctl_pitch_setpoint, V_CTL_PITCH_TRIM, v_ctl_pitch_trim, v_ctl_speed_mode, V_CTL_SPEED_THROTTLE, and v_ctl_throttle_setpoint.
Here is the call graph for this function:
|
inlinestatic |
Definition at line 215 of file guidance_v_n.c.
References launch, nav_pitch, pprz_mode, PPRZ_MODE_MANUAL, stateGetSpeedEnu_f(), v_ctl_auto_pitch_dgain, v_ctl_auto_pitch_igain, V_CTL_AUTO_PITCH_MAX_SUM_ERR, v_ctl_auto_pitch_pgain, v_ctl_auto_pitch_sum_err, v_ctl_auto_throttle_pitch_of_vz_pgain, v_ctl_climb_setpoint, v_ctl_pitch_setpoint, v_ctl_pitch_trim, and EnuCoor_f::z.
Referenced by v_ctl_climb_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 243 of file guidance_v_n.c.
References controlled_throttle, launch, pprz_mode, PPRZ_MODE_MANUAL, stateGetSpeedEnu_f(), v_ctl_auto_throttle_climb_throttle_increment, v_ctl_auto_throttle_cruise_throttle, v_ctl_auto_throttle_dgain, v_ctl_auto_throttle_igain, V_CTL_AUTO_THROTTLE_MAX_SUM_ERR, v_ctl_auto_throttle_pgain, v_ctl_auto_throttle_sum_err, v_ctl_climb_setpoint, and EnuCoor_f::z.
Referenced by v_ctl_climb_loop().
Here is the call graph for this function: Here is the caller graph for this function:| void v_ctl_throttle_slew | ( | void | ) |
Computes slewed throttle from throttle setpoint called at 20Hz.
Computes throttle_slewed from throttle_setpoint.
Definition at line 393 of file guidance_v_n.c.
References MAX_PPRZ, TRIM_PPRZ, v_ctl_throttle_setpoint, V_CTL_THROTTLE_SLEW, and v_ctl_throttle_slewed.
| float controlled_throttle |
Definition at line 85 of file guidance_v_n.c.
Referenced by v_ctl_climb_auto_throttle_loop(), v_ctl_climb_loop(), v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_altitude_error |
in meters, (setpoint - alt) -> positive = too low
Definition at line 42 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_pgain |
Definition at line 41 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_pre_climb |
Path Angle.
Definition at line 40 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_setpoint |
in meters above MSL
Definition at line 39 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_auto_pitch_dgain |
Definition at line 73 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| float v_ctl_auto_pitch_igain |
Definition at line 74 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| float v_ctl_auto_pitch_pgain |
Definition at line 72 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| float v_ctl_auto_pitch_sum_err |
Definition at line 75 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| float v_ctl_auto_throttle_climb_throttle_increment |
Definition at line 58 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_auto_throttle_cruise_throttle |
Definition at line 54 of file guidance_v_n.c.
Referenced by v_ctl_climb_loop(), v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_auto_throttle_dgain |
Definition at line 61 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_auto_throttle_igain |
Definition at line 60 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_auto_throttle_max_cruise_throttle |
Definition at line 57 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_min_cruise_throttle |
Definition at line 56 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_nominal_cruise_throttle |
Definition at line 55 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_pgain |
Definition at line 59 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_throttle().
| float v_ctl_auto_throttle_pitch_of_vz_dgain |
Definition at line 65 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_pitch_of_vz_pgain |
Definition at line 64 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| uint8_t v_ctl_auto_throttle_submode |
Definition at line 47 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_sum_err |
Definition at line 62 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_throttle().
| uint8_t v_ctl_climb_mode |
Definition at line 46 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_climb_setpoint |
Definition at line 45 of file guidance_v_n.c.
Referenced by v_ctl_altitude_loop(), v_ctl_init(), v_ctl_set_pitch(), and v_ctl_set_throttle().
| uint8_t v_ctl_mode |
Definition at line 36 of file guidance_v_n.c.
Referenced by v_ctl_init().
| float v_ctl_pitch_setpoint |
Definition at line 88 of file guidance_v_n.c.
Referenced by v_ctl_climb_loop(), v_ctl_init(), and v_ctl_set_pitch().
| float v_ctl_pitch_trim |
Definition at line 92 of file guidance_v_n.c.
Referenced by v_ctl_init(), and v_ctl_set_pitch().
| uint8_t v_ctl_speed_mode |
Definition at line 99 of file guidance_v_n.c.
Referenced by v_ctl_climb_loop(), and v_ctl_init().
| pprz_t v_ctl_throttle_setpoint |
Definition at line 86 of file guidance_v_n.c.
Referenced by v_ctl_climb_loop(), v_ctl_init(), and v_ctl_throttle_slew().
| pprz_t v_ctl_throttle_slewed |
Definition at line 87 of file guidance_v_n.c.
Referenced by v_ctl_throttle_slew().
 1.8.8
1.8.8