|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Adaptation block of the vertical guidance. More...
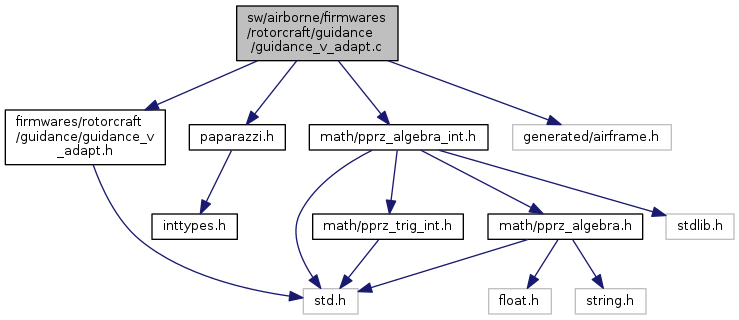
#include "firmwares/rotorcraft/guidance/guidance_v_adapt.h"#include "paparazzi.h"#include "math/pprz_algebra_int.h"#include "generated/airframe.h" Include dependency graph for guidance_v_adapt.c:
Include dependency graph for guidance_v_adapt.c:Go to the source code of this file.
Functions | |
| void | gv_adapt_init (void) |
| void | gv_adapt_run (int32_t zdd_meas, int32_t thrust_applied, int32_t zd_ref) |
| Adaptation function. More... | |
Variables | |
| int32_t | gv_adapt_X |
| State of the estimator. More... | |
| int32_t | gv_adapt_P |
| Covariance. More... | |
| int32_t | gv_adapt_Xmeas |
| Measurement. More... | |
| static const int32_t | gv_adapt_P0 = BFP_OF_REAL(GV_ADAPT_P0_F, GV_ADAPT_P_FRAC) |
| static const int32_t | gv_adapt_X0 |
Adaptation block of the vertical guidance.
This is a dimension one kalman filter estimating the ratio of vertical acceleration over thrust command ( ~ inverse of the mass ) needed by the invert dynamic model to produce a nominal command.
Definition in file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_INITIAL_HOVER_THROTTLE 0.3 |
Initial hover throttle as factor of MAX_PPRZ.
Should be a value between GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE and GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE. It is better to start with low thrust and let it rise as the adaptive filter finds the vehicle needs more thrust.
Definition at line 43 of file guidance_v_adapt.c.
| #define GUIDANCE_V_ADAPT_MAX_ACCEL 4.0 |
Filter is not fed if accel values are more than +/- MAX_ACCEL.
MAX_ACCEL is a positive value in m/s^2
Definition at line 79 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GUIDANCE_V_ADAPT_MAX_CMD 0.9 |
Filter is not fed if command values are out of a % of 0/MAX_PPRZ.
MAX_CMD and MIN_CMD must be between 0 and 1 with MIN_CMD < MAX_CMD
Definition at line 86 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE 0.75 |
Maximum hover throttle as factor of MAX_PPRZ.
With the default of 0.75 the nominal hover throttle will never go over 75% of max throttle.
Definition at line 61 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GUIDANCE_V_ADAPT_MIN_CMD 0.1 |
Definition at line 89 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE 0.2 |
Minimum hover throttle as factor of MAX_PPRZ.
With the default of 0.2 the nominal hover throttle will never go lower than 20%.
Definition at line 52 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GUIDANCE_V_ADAPT_NOISE_FACTOR 1.0 |
Adapt noise factor.
Smaller values will make the filter to adapt faster. Bigger values (slower adaptation) make the filter more robust to external pertubations. Factor should always be >0
Definition at line 71 of file guidance_v_adapt.c.
| #define GV_ADAPT_MEAS_NOISE_HOVER BFP_OF_REAL(GV_ADAPT_MEAS_NOISE_HOVER_F, GV_ADAPT_P_FRAC) |
Definition at line 106 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GV_ADAPT_MEAS_NOISE_HOVER_F (50.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
Definition at line 105 of file guidance_v_adapt.c.
| #define GV_ADAPT_MEAS_NOISE_OF_ZD (100.0*GUIDANCE_V_ADAPT_NOISE_FACTOR) |
Definition at line 107 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GV_ADAPT_P0_F 0.1 |
Definition at line 110 of file guidance_v_adapt.c.
| #define GV_ADAPT_SYS_NOISE BFP_OF_REAL(GV_ADAPT_SYS_NOISE_F, GV_ADAPT_P_FRAC) |
Definition at line 102 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| #define GV_ADAPT_SYS_NOISE_F 0.00005 |
Definition at line 100 of file guidance_v_adapt.c.
| #define K_FRAC 12 |
Definition at line 121 of file guidance_v_adapt.c.
Referenced by gv_adapt_run().
| void gv_adapt_init | ( | void | ) |
Definition at line 115 of file guidance_v_adapt.c.
References gv_adapt_P0, and gv_adapt_X0.
Referenced by guidance_v_init(), guidance_v_notify_in_flight(), and guidance_v_run().
Here is the caller graph for this function:Adaptation function.
| zdd_meas | vert accel measurement in m/s^2 with INT32_ACCEL_FRAC |
| thrust_applied | controller input [0 : MAX_PPRZ] |
| zd_ref | vertical speed reference in m/s with INT32_SPEED_FRAC |
Definition at line 128 of file guidance_v_adapt.c.
References ACCEL_BFP_OF_REAL, BFP_OF_REAL, E, GUIDANCE_V_ADAPT_MAX_ACCEL, GUIDANCE_V_ADAPT_MAX_CMD, GUIDANCE_V_ADAPT_MAX_HOVER_THROTTLE, GUIDANCE_V_ADAPT_MIN_CMD, GUIDANCE_V_ADAPT_MIN_HOVER_THROTTLE, GV_ADAPT_MEAS_NOISE_HOVER, GV_ADAPT_MEAS_NOISE_OF_ZD, gv_adapt_P, gv_adapt_P0, GV_ADAPT_P_FRAC, GV_ADAPT_SYS_NOISE, gv_adapt_X, GV_ADAPT_X_FRAC, INT32_ACCEL_FRAC, INT32_SPEED_FRAC, K_FRAC, MAX_PPRZ, and ref.
Referenced by guidance_v_run().
Here is the caller graph for this function:| int32_t gv_adapt_P |
Covariance.
fixed point representation with GV_ADAPT_P_FRAC Q13.18
Definition at line 95 of file guidance_v_adapt.c.
Referenced by gv_adapt_run(), and send_vert_loop().
|
static |
Definition at line 111 of file guidance_v_adapt.c.
Referenced by gv_adapt_init(), and gv_adapt_run().
| int32_t gv_adapt_X |
State of the estimator.
fixed point representation with GV_ADAPT_X_FRAC Q13.18
Definition at line 94 of file guidance_v_adapt.c.
Referenced by gv_adapt_run(), run_hover_loop(), and send_vert_loop().
|
static |
Definition at line 112 of file guidance_v_adapt.c.
Referenced by gv_adapt_init().
| int32_t gv_adapt_Xmeas |
 1.8.8
1.8.8