|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to IROS2016 to learn more! More...
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "subsystems/ins/ins_int.h"#include "subsystems/radio_control.h"#include "state.h"#include "subsystems/imu.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "stabilization/stabilization_attitude_ref_quat_int.h"#include "firmwares/rotorcraft/stabilization.h"#include "stdio.h" Include dependency graph for guidance_indi.c:
Include dependency graph for guidance_indi.c:Go to the source code of this file.
Functions | |
| void | guidance_indi_enter (void) |
| Call upon entering indi guidance. More... | |
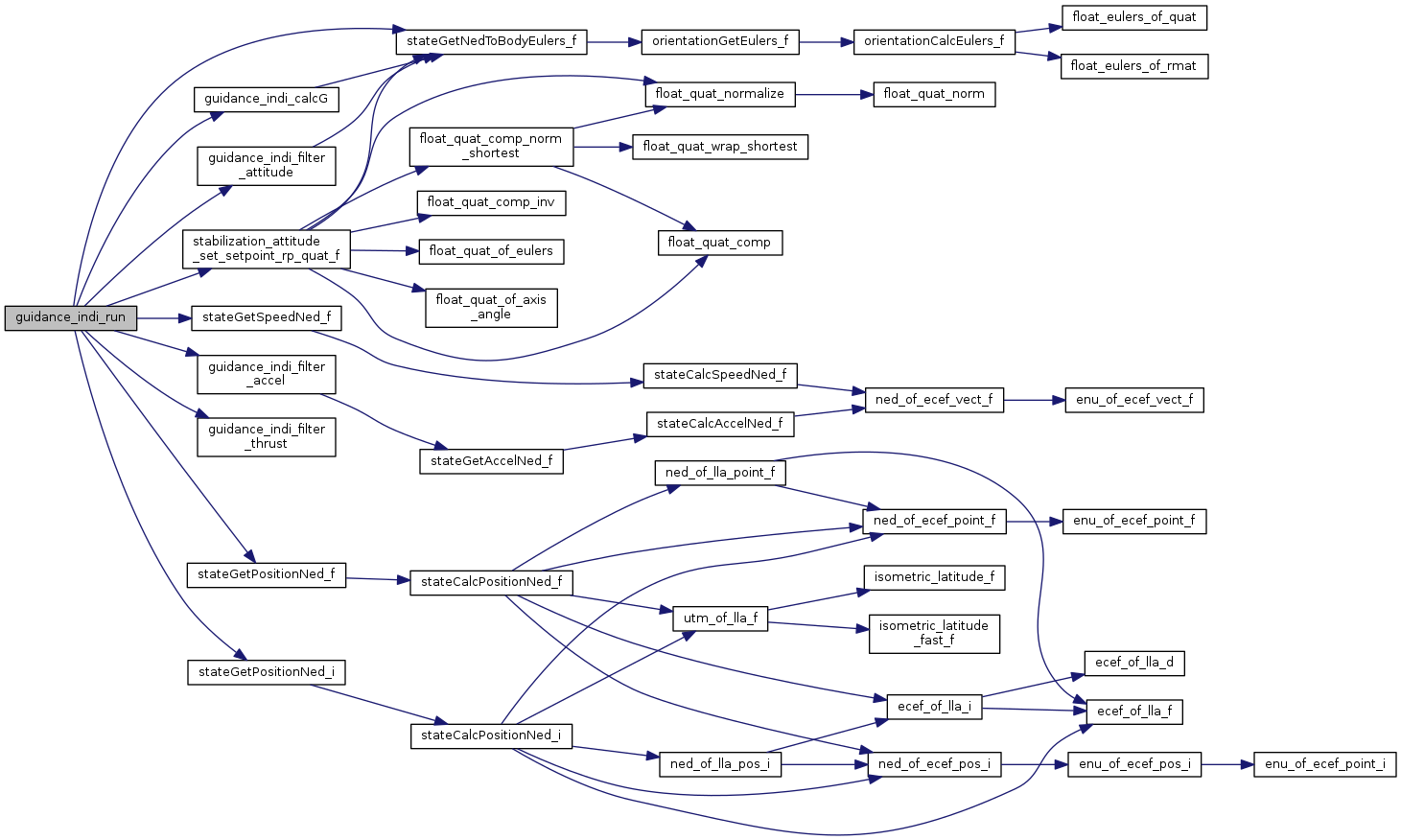
| void | guidance_indi_run (bool in_flight, int32_t heading) |
| void | guidance_indi_filter_accel (void) |
| low pass the accelerometer measurements with a second order filter to remove noise from vibrations More... | |
| void | guidance_indi_filter_attitude (void) |
| Filter the attitude, such that it corresponds to the filtered measured acceleration. More... | |
| void | guidance_indi_calcG (struct FloatMat33 *Gmat) |
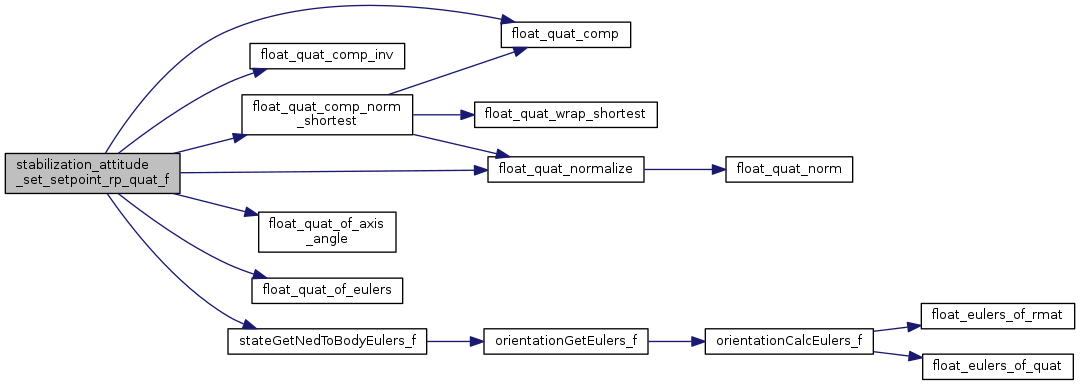
| void | stabilization_attitude_set_setpoint_rp_quat_f (struct FloatEulers *indi_rp_cmd, bool in_flight, int32_t heading) |
Variables | |
| float | guidance_indi_pos_gain = 0.5 |
| float | guidance_indi_speed_gain = 1.8 |
| struct FloatVect3 | sp_accel = {0.0,0.0,0.0} |
| struct FloatVect3 | filt_accel_ned |
| struct FloatVect3 | filt_accel_ned_d |
| struct FloatVect3 | filt_accel_ned_dd |
| float | filt_accelzbody = 0 |
| float | filt_accelzbodyd = 0 |
| float | filt_accelzbodydd = 0 |
| float | roll_filt = 0 |
| float | roll_filtd = 0 |
| float | roll_filtdd = 0 |
| float | pitch_filt = 0 |
| float | pitch_filtd = 0 |
| float | pitch_filtdd = 0 |
| float | thrust_act = 0 |
| float | thrust_filt = 0 |
| float | thrust_filtd = 0 |
| float | thrust_filtdd = 0 |
| struct FloatMat33 | Ga |
| struct FloatMat33 | Ga_inv |
| struct FloatVect3 | euler_cmd |
| float | filter_omega = 20.0 |
| float | filter_zeta = 0.65 |
| struct FloatEulers | guidance_euler_cmd |
| float | thrust_in |
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to IROS2016 to learn more!
Definition in file guidance_indi.c.
| void guidance_indi_calcG | ( | struct FloatMat33 * | Gmat | ) |
| Gmat | array to write the matrix to [3x3] |
Calculate the matrix of partial derivatives of the roll, pitch and thrust w.r.t. the NED accelerations
Definition at line 256 of file guidance_indi.c.
References FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_enter | ( | void | ) |
Call upon entering indi guidance.
Definition at line 94 of file guidance_indi.c.
References filt_accel_ned, filt_accel_ned_d, filt_accel_ned_dd, filt_accelzbody, filt_accelzbodyd, filt_accelzbodydd, FLOAT_VECT3_ZERO, pitch_filt, pitch_filtd, pitch_filtdd, roll_filt, roll_filtd, roll_filtdd, thrust_act, thrust_filt, thrust_filtd, thrust_filtdd, and thrust_in.
Referenced by guidance_h_init(), and guidance_h_mode_changed().
Here is the caller graph for this function:| void guidance_indi_filter_accel | ( | void | ) |
low pass the accelerometer measurements with a second order filter to remove noise from vibrations
Definition at line 223 of file guidance_indi.c.
References filt_accel_ned, filt_accel_ned_d, filt_accel_ned_dd, filter_omega, filter_zeta, stateGetAccelNed_f(), VECT3_ADD_SCALED, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_filter_attitude | ( | void | ) |
Filter the attitude, such that it corresponds to the filtered measured acceleration.
Definition at line 238 of file guidance_indi.c.
References filter_omega, filter_zeta, FloatEulers::phi, pitch_filt, pitch_filtd, pitch_filtdd, roll_filt, roll_filtd, roll_filtdd, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_run | ( | bool | in_flight, |
| int32_t | heading | ||
| ) |
| in_flight | in flight boolean |
| heading | the desired heading [rad] |
main indi guidance function
Definition at line 120 of file guidance_indi.c.
References euler_cmd, filt_accel_ned, Ga, Ga_inv, guidance_euler_cmd, guidance_h, GUIDANCE_H_MAX_BANK, guidance_indi_calcG(), guidance_indi_filter_accel(), guidance_indi_filter_attitude(), guidance_indi_filter_thrust(), guidance_indi_pos_gain, guidance_indi_speed_gain, guidance_v_z_ref, MAT33_INV, MAT33_VECT3_MUL, FloatEulers::phi, pitch_filt, HorizontalGuidanceReference::pos, POS_FLOAT_OF_BFP, FloatEulers::psi, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, HorizontalGuidance::ref, roll_filt, stabilization_attitude_set_setpoint_rp_quat_f(), stabilization_cmd, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), stateGetPositionNed_i(), stateGetSpeedNed_f(), FloatEulers::theta, thrust_filt, thrust_in, RadioControl::values, FloatVect3::x, NedCoor_f::x, Int32Vect2::x, FloatVect3::y, NedCoor_f::y, Int32Vect2::y, FloatVect3::z, and NedCoor_f::z.
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_set_setpoint_rp_quat_f | ( | struct FloatEulers * | indi_rp_cmd, |
| bool | in_flight, | ||
| int32_t | heading | ||
| ) |
| indi_rp_cmd | roll/pitch command from indi guidance [rad] (float) |
| in_flight | in flight boolean |
| heading | the desired heading [rad] in BFP with INT32_ANGLE_FRAC |
function that creates a quaternion from a roll, pitch and yaw setpoint
Definition at line 287 of file guidance_indi.c.
References ANGLE_FLOAT_OF_BFP, float_quat_comp(), float_quat_comp_inv(), float_quat_comp_norm_shortest(), float_quat_normalize(), float_quat_of_axis_angle(), float_quat_of_eulers(), QUAT_BFP_OF_REAL, QUAT_COPY, stab_att_sp_quat, and stateGetNedToBodyEulers_f().
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatVect3 euler_cmd |
Definition at line 82 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatVect3 filt_accel_ned |
Definition at line 63 of file guidance_indi.c.
Referenced by guidance_indi_enter(), guidance_indi_filter_accel(), and guidance_indi_run().
| struct FloatVect3 filt_accel_ned_d |
Definition at line 64 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_accel().
| struct FloatVect3 filt_accel_ned_dd |
Definition at line 65 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_accel().
| float filt_accelzbody = 0 |
Definition at line 66 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float filt_accelzbodyd = 0 |
Definition at line 67 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float filt_accelzbodydd = 0 |
Definition at line 68 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float filter_omega = 20.0 |
Definition at line 84 of file guidance_indi.c.
Referenced by guidance_indi_filter_accel(), and guidance_indi_filter_attitude().
| float filter_zeta = 0.65 |
Definition at line 85 of file guidance_indi.c.
Referenced by guidance_indi_filter_accel(), and guidance_indi_filter_attitude().
| struct FloatMat33 Ga |
Definition at line 80 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatMat33 Ga_inv |
Definition at line 81 of file guidance_indi.c.
Referenced by guidance_indi_run().
| struct FloatEulers guidance_euler_cmd |
Definition at line 87 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float guidance_indi_pos_gain = 0.5 |
Definition at line 46 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float guidance_indi_speed_gain = 1.8 |
Definition at line 47 of file guidance_indi.c.
Referenced by guidance_indi_run().
| float pitch_filt = 0 |
Definition at line 72 of file guidance_indi.c.
Referenced by guidance_indi_enter(), guidance_indi_filter_attitude(), and guidance_indi_run().
| float pitch_filtd = 0 |
Definition at line 73 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_attitude().
| float pitch_filtdd = 0 |
Definition at line 74 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_attitude().
| float roll_filt = 0 |
Definition at line 69 of file guidance_indi.c.
Referenced by guidance_indi_enter(), guidance_indi_filter_attitude(), and guidance_indi_run().
| float roll_filtd = 0 |
Definition at line 70 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_attitude().
| float roll_filtdd = 0 |
Definition at line 71 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_filter_attitude().
| struct FloatVect3 sp_accel = {0.0,0.0,0.0} |
Definition at line 48 of file guidance_indi.c.
| float thrust_act = 0 |
Definition at line 75 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float thrust_filt = 0 |
Definition at line 76 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_run().
| float thrust_filtd = 0 |
Definition at line 77 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float thrust_filtdd = 0 |
Definition at line 78 of file guidance_indi.c.
Referenced by guidance_indi_enter().
| float thrust_in |
Definition at line 88 of file guidance_indi.c.
Referenced by guidance_indi_enter(), and guidance_indi_run().
 1.8.8
1.8.8