|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Demo prog with ahrs and simple roll/pitch commands to actuators. More...
#include <inttypes.h>#include "subsystems/datalink/telemetry.h"#include "subsystems/datalink/datalink.h"#include "subsystems/datalink/downlink.h"#include "subsystems/abi.h"#include "generated/airframe.h"#include "generated/settings.h"#include "generated/modules.h"#include "std.h"#include "mcu.h"#include "mcu_periph/sys_time.h"#include "led.h"#include "state.h"#include "subsystems/imu.h"#include "subsystems/ahrs.h"#include "subsystems/ahrs/ahrs_aligner.h"#include "subsystems/commands.h"#include "subsystems/actuators.h"#include "subsystems/settings.h"#include "pprz_version.h" Include dependency graph for demo_ahrs_actuators.c:
Include dependency graph for demo_ahrs_actuators.c:Go to the source code of this file.
Macros | |
| #define | PERIODIC_C_MAIN |
| #define | ABI_C |
| #define | MODULES_C |
| #define | DEMO_MAX_ROLL RadOfDeg(65) |
| #define | DEMO_MAX_PITCH RadOfDeg(65) |
Functions | |
| static void | main_init (void) |
| static void | main_periodic_task (void) |
| static void | main_event_task (void) |
| static void | send_alive (struct transport_tx *trans, struct link_device *dev) |
| static void | send_autopilot_version (struct transport_tx *trans, struct link_device *dev) |
| static void | send_actuators (struct transport_tx *trans, struct link_device *dev) |
| static void | send_commands (struct transport_tx *trans, struct link_device *dev) |
| int | main (void) |
Demo prog with ahrs and simple roll/pitch commands to actuators.
Definition in file demo_ahrs_actuators.c.
| #define ABI_C |
Definition at line 31 of file demo_ahrs_actuators.c.
| #define DEMO_MAX_PITCH RadOfDeg(65) |
Definition at line 64 of file demo_ahrs_actuators.c.
| #define DEMO_MAX_ROLL RadOfDeg(65) |
Definition at line 60 of file demo_ahrs_actuators.c.
Referenced by main_periodic_task().
| #define MODULES_C |
Definition at line 32 of file demo_ahrs_actuators.c.
| #define PERIODIC_C_MAIN |
Definition at line 30 of file demo_ahrs_actuators.c.
| int main | ( | void | ) |
Definition at line 76 of file demo_ahrs_actuators.c.
References main_event_task(), main_init(), main_periodic_task(), and sys_time_check_and_ack_timer().
Here is the call graph for this function:
|
inlinestatic |
Definition at line 136 of file demo_ahrs_actuators.c.
References DatalinkEvent, and mcu_event().
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 88 of file demo_ahrs_actuators.c.
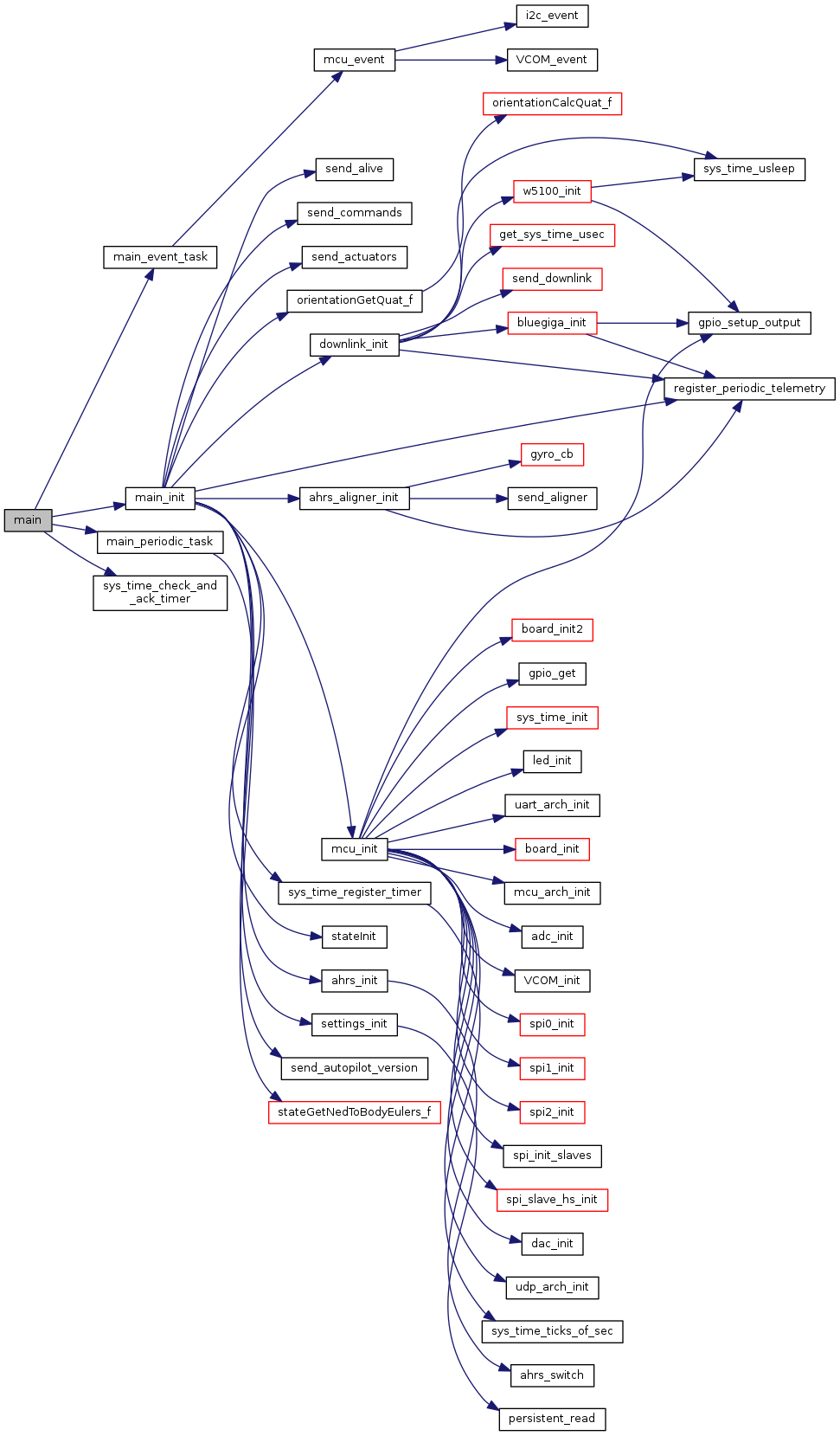
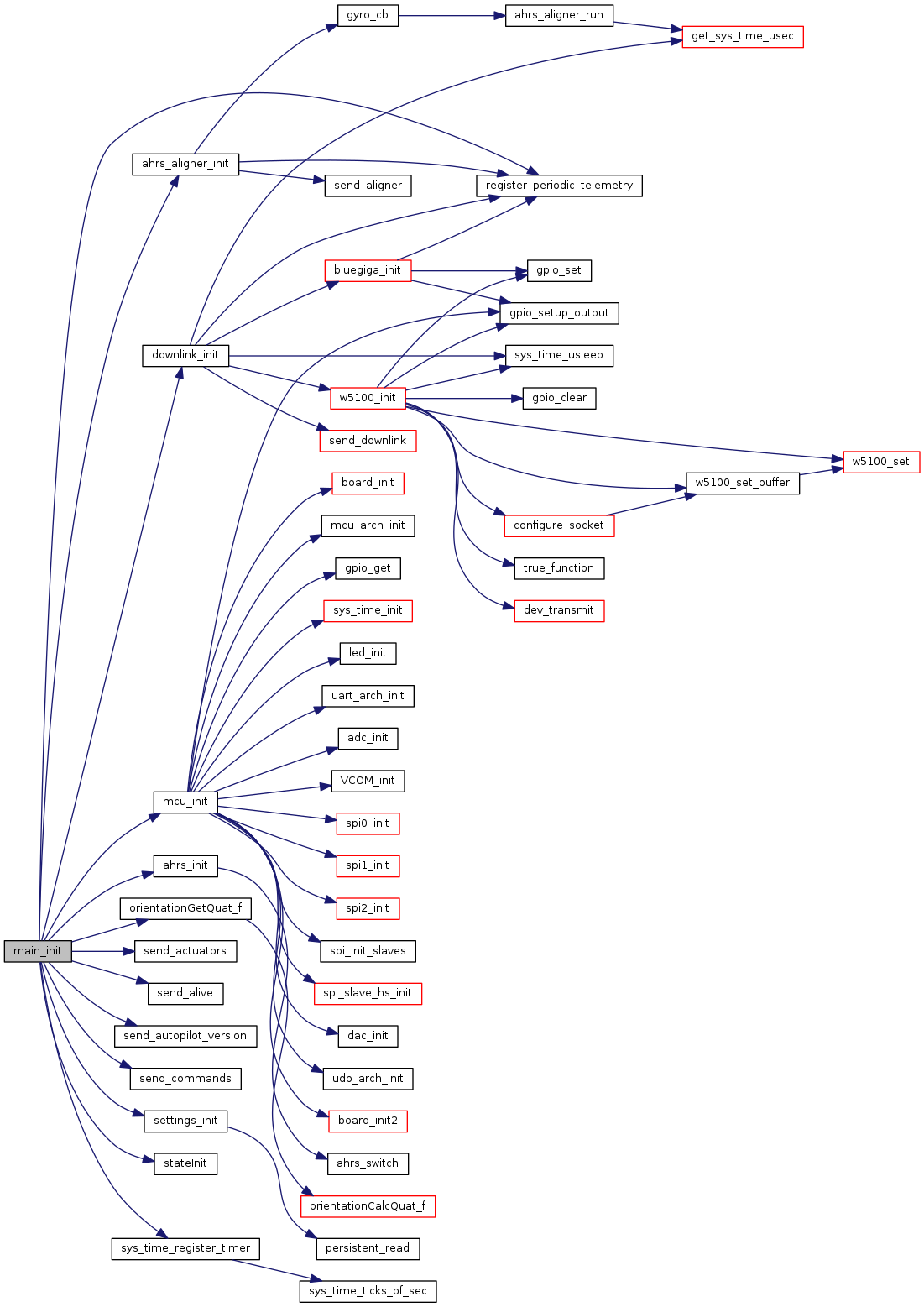
References ahrs_aligner_init(), ahrs_init(), Imu::body_to_imu, DefaultPeriodic, downlink_init(), imu, mcu_init(), mcu_int_enable, orientationGetQuat_f(), register_periodic_telemetry(), send_actuators(), send_alive(), send_autopilot_version(), send_commands(), settings_init(), stateInit(), and sys_time_register_timer().
Referenced by main(), and nps_autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 117 of file demo_ahrs_actuators.c.
References commands, datalink_time, DefaultChannel, DefaultDevice, DefaultPeriodic, DEMO_MAX_ROLL, LED_PERIODIC, MAX_PPRZ, sys_time::nb_sec, FloatEulers::phi, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 155 of file demo_ahrs_actuators.c.
Referenced by autopilot_init(), init_fbw(), and main_init().
Here is the caller graph for this function:
|
static |
Definition at line 143 of file demo_ahrs_actuators.c.
Referenced by main_init().
Here is the caller graph for this function:
|
static |
Definition at line 148 of file demo_ahrs_actuators.c.
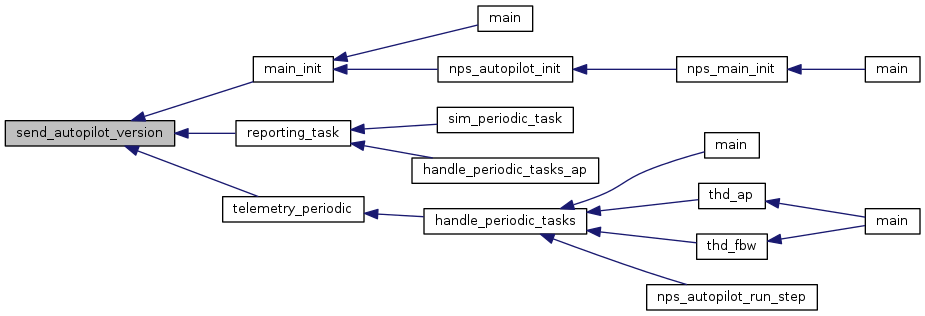
Referenced by main_init(), reporting_task(), and telemetry_periodic().
Here is the caller graph for this function:
|
static |
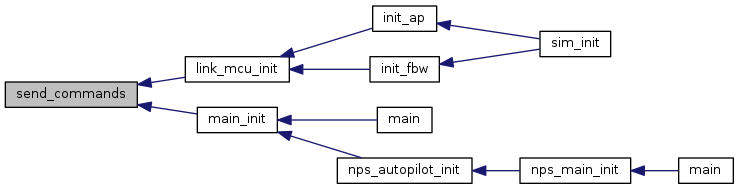
Definition at line 160 of file demo_ahrs_actuators.c.
References commands.
Referenced by link_mcu_init(), and main_init().
Here is the caller graph for this function: 1.8.8
1.8.8