|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Get live images from a RTP/UDP stream and save pictures on internal memory. More...
#include "std.h" Include dependency graph for bebop_front_camera.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for bebop_front_camera.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | bebopfrontcamera_t |
Functions | |
| void | bebop_front_camera_init (void) |
| Initialize the view video. More... | |
| void | bebop_front_camera_periodic (void) |
| A dummy for now. More... | |
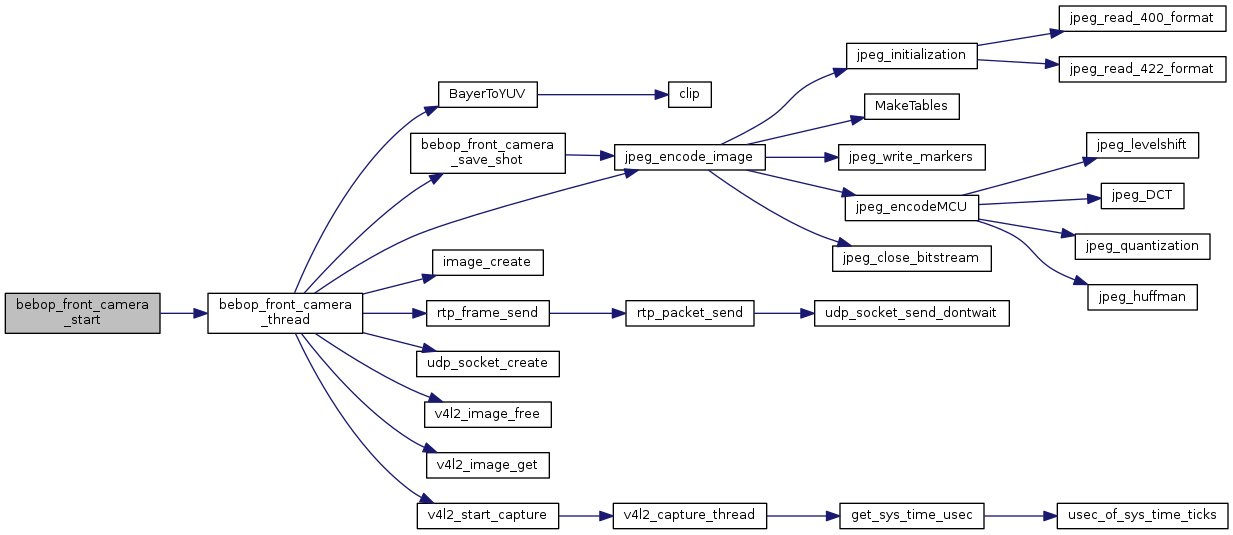
| void | bebop_front_camera_start (void) |
| Start with streaming. More... | |
| void | bebop_front_camera_stop (void) |
| Stops the streaming This could take some time, because the thread is stopped asynchronous. More... | |
| void | bebop_front_camera_take_shot (bool take) |
Variables | |
| struct bebopfrontcamera_t | bebop_front_camera |
Get live images from a RTP/UDP stream and save pictures on internal memory.
Works on Bebop platforms
Definition in file bebop_front_camera.h.
| struct bebopfrontcamera_t |
Definition at line 38 of file bebop_front_camera.h.
Collaboration diagram for bebopfrontcamera_t:| Data Fields | ||
|---|---|---|
| struct v4l2_device * | dev | The V4L2 device that is used for the video stream. |
| uint8_t | downsize_factor | Downsize factor during the stream. |
| uint8_t | fps | The amount of frames per second. |
| volatile bool | is_streaming | When the device is streaming. |
| uint8_t | quality_factor | Quality factor during the stream. |
| uint16_t | shot_number | The last shot number. |
| volatile bool | take_shot | Wether to take an image. |
| bool | use_rtp | Stream over RTP. |
| void bebop_front_camera_init | ( | void | ) |
Initialize the view video.
Definition at line 139 of file bebop_front_camera.c.
References BEBOP_FRONT_CAMERA_SHOT_PATH, bebopfrontcamera_t::dev, MT9F002_HEIGHT, MT9F002_WIDTH, v4l2_init(), and v4l2_init_subdev().
Here is the call graph for this function:| void bebop_front_camera_periodic | ( | void | ) |
A dummy for now.
Definition at line 62 of file bebop_front_camera.c.
| void bebop_front_camera_start | ( | void | ) |
Start with streaming.
Definition at line 166 of file bebop_front_camera.c.
References bebop_front_camera_thread(), and bebopfrontcamera_t::is_streaming.
Here is the call graph for this function:| void bebop_front_camera_stop | ( | void | ) |
Stops the streaming This could take some time, because the thread is stopped asynchronous.
Definition at line 185 of file bebop_front_camera.c.
References bebopfrontcamera_t::dev, bebopfrontcamera_t::is_streaming, v4l2_device::name, and v4l2_stop_capture().
Here is the call graph for this function:| void bebop_front_camera_take_shot | ( | bool | take | ) |
Definition at line 73 of file bebop_front_camera.c.
References bebopfrontcamera_t::take_shot.
| struct bebopfrontcamera_t bebop_front_camera |
Definition at line 65 of file bebop_front_camera.c.
 1.8.8
1.8.8