|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Firmware dependent file for the guiding vector field algorithm for 2D trajectories. More...
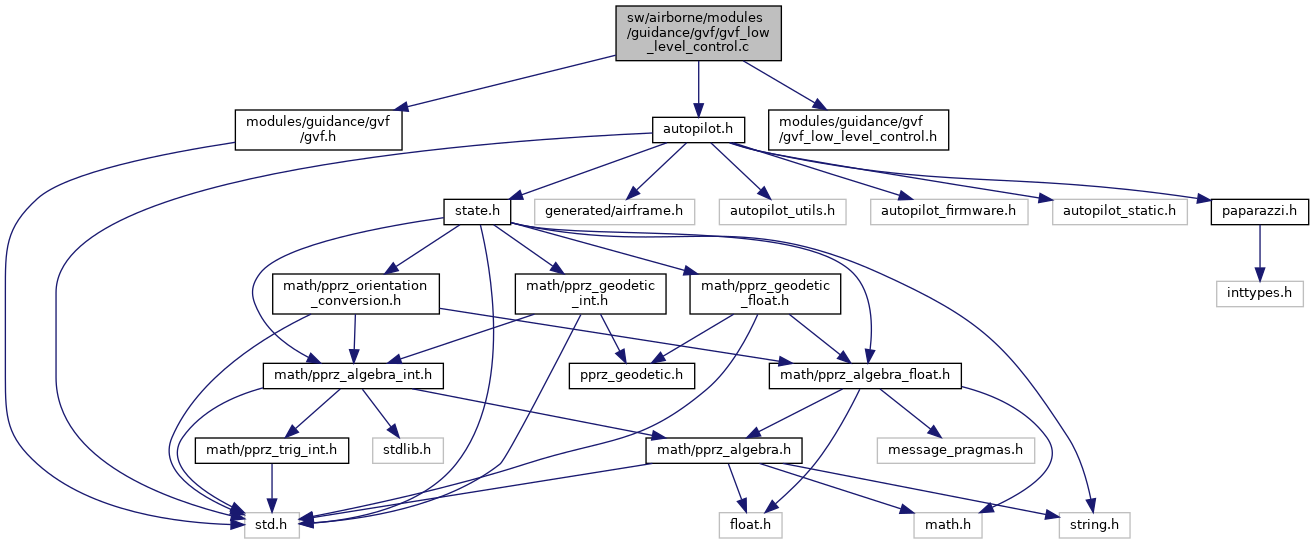
#include "autopilot.h"#include "modules/guidance/gvf/gvf_low_level_control.h"#include "modules/guidance/gvf/gvf.h" Include dependency graph for gvf_low_level_control.c:
Include dependency graph for gvf_low_level_control.c:Go to the source code of this file.
Functions | |
| void | gvf_low_level_getState (void) |
| void | gvf_low_level_control_2D (float omega) |
Firmware dependent file for the guiding vector field algorithm for 2D trajectories.
Definition in file gvf_low_level_control.c.
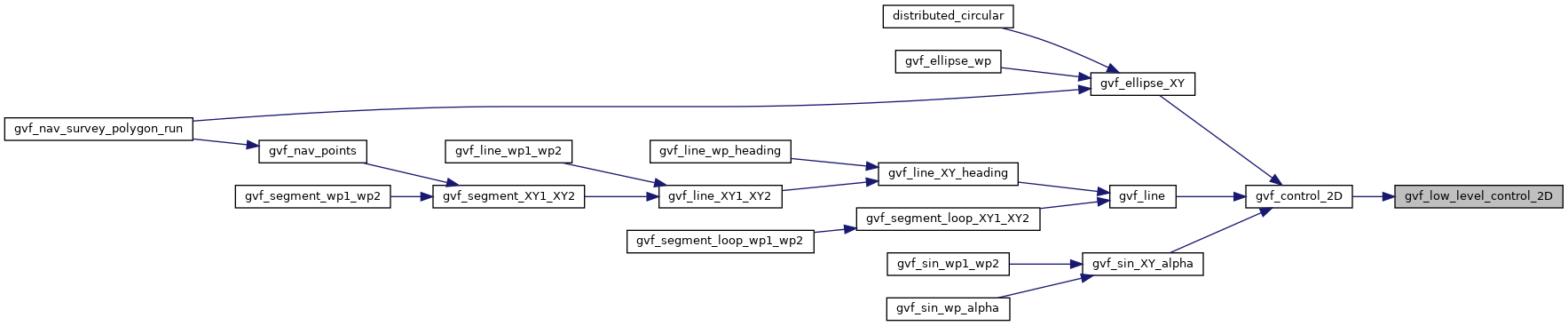
| void gvf_low_level_control_2D | ( | float | omega | ) |
Definition at line 52 of file gvf_low_level_control.c.
References AP_MODE_AUTO2, autopilot_get_mode(), ground_speed, GVF_GRAVITY, h_ctl_roll_max_setpoint, h_ctl_roll_setpoint, lateral_mode, LATERAL_MODE_ROLL, stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by gvf_control_2D().
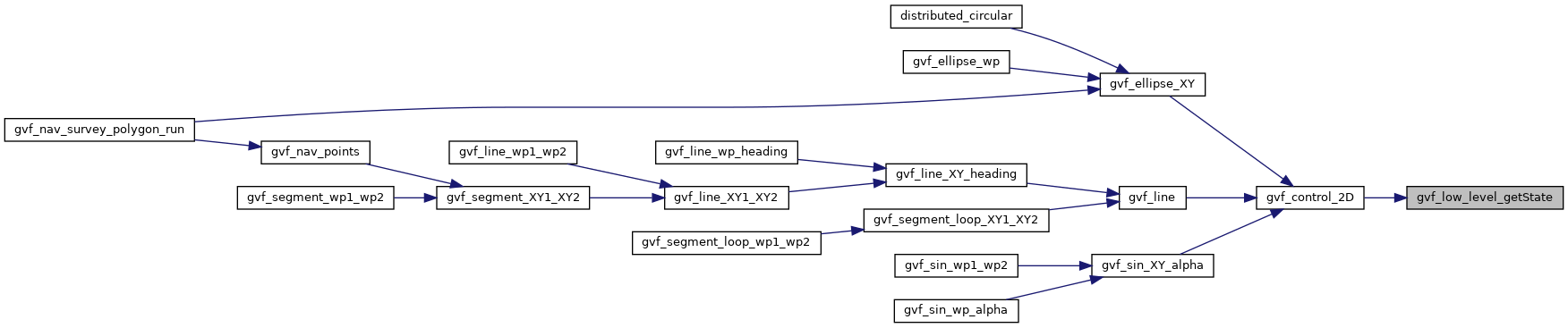
Here is the call graph for this function: Here is the caller graph for this function:| void gvf_low_level_getState | ( | void | ) |
Definition at line 35 of file gvf_low_level_control.c.
References gvf_st::course, ground_speed, gvf_state, FloatEulers::psi, gvf_st::px_dot, gvf_st::py_dot, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), stateGetSpeedEnu_f(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by gvf_control_2D().
Here is the call graph for this function: Here is the caller graph for this function: