|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v6.2.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
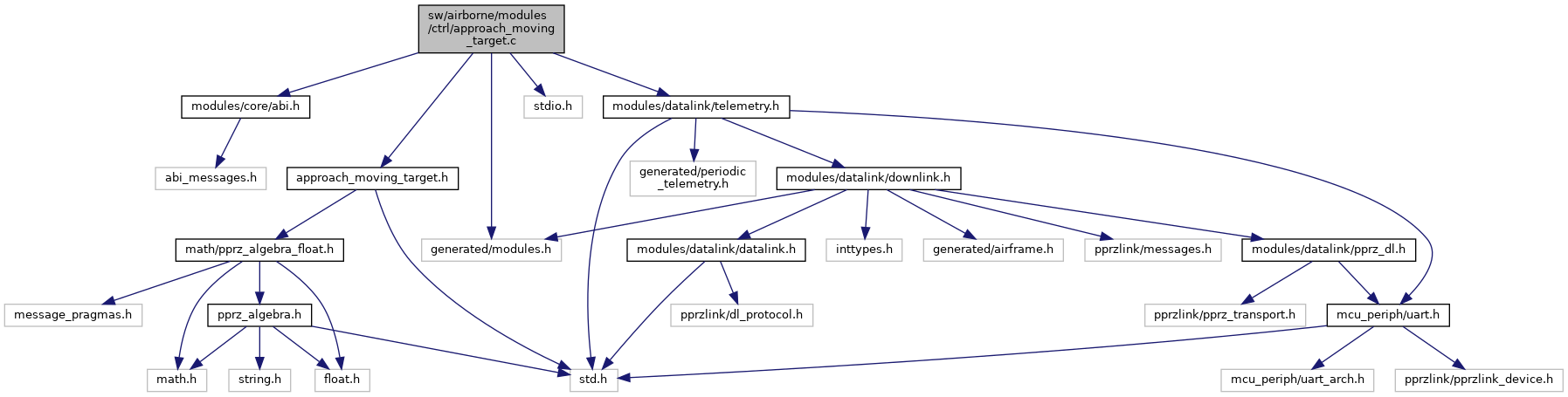
#include "approach_moving_target.h"#include "generated/modules.h"#include "modules/core/abi.h"#include <stdio.h>#include "modules/datalink/telemetry.h" Include dependency graph for approach_moving_target.c:
Include dependency graph for approach_moving_target.c:Go to the source code of this file.
Data Structures | |
| struct | AmtTelem |
Macros | |
| #define | DEBUG_AMT TRUE |
Functions | |
| struct FloatVect3 | nav_get_speed_sp_from_diagonal (struct EnuCoor_i target, float pos_gain, float rope_heading) |
| void | update_waypoint (uint8_t wp_id, struct FloatVect3 *target_ned) |
| static void | send_approach_moving_target (struct transport_tx *trans, struct link_device *dev) |
| void | approach_moving_target_init (void) |
| void | approach_moving_target_enable (uint8_t wp_id) |
| void | follow_diagonal_approach (void) |
| Generates a velocity reference from a diagonal approach path. More... | |
Variables | |
| float | amt_err_slowdown_gain = AMT_ERR_SLOWDOWN_GAIN |
| float | approach_moving_target_angle_deg |
| struct Amt | amt |
| struct AmtTelem | amt_telem |
| bool | approach_moving_target_enabled = false |
Definition in file approach_moving_target.c.
| struct AmtTelem |
Definition at line 50 of file approach_moving_target.c.
Collaboration diagram for AmtTelem:| Data Fields | ||
|---|---|---|
| struct FloatVect3 | des_pos | |
| struct FloatVect3 | des_vel | |
| #define DEBUG_AMT TRUE |
Definition at line 35 of file approach_moving_target.c.
| void approach_moving_target_enable | ( | uint8_t | wp_id | ) |
Definition at line 102 of file approach_moving_target.c.
References amt, Amt::enabled_time, get_sys_time_msec(), and Amt::wp_id.
Here is the call graph for this function:| void approach_moving_target_init | ( | void | ) |
Definition at line 76 of file approach_moving_target.c.
References DefaultPeriodic, register_periodic_telemetry(), and send_approach_moving_target().
Here is the call graph for this function:| void follow_diagonal_approach | ( | void | ) |
Generates a velocity reference from a diagonal approach path.
Definition at line 111 of file approach_moving_target.c.
| struct FloatVect3 nav_get_speed_sp_from_diagonal | ( | struct EnuCoor_i | target, |
| float | pos_gain, | ||
| float | rope_heading | ||
| ) |
|
static |
Definition at line 63 of file approach_moving_target.c.
References amt, amt_telem, AmtTelem::des_pos, AmtTelem::des_vel, dev, Amt::distance, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by approach_moving_target_init().
Here is the caller graph for this function:| void update_waypoint | ( | uint8_t | wp_id, |
| struct FloatVect3 * | target_ned | ||
| ) |
Definition at line 84 of file approach_moving_target.c.
References DefaultChannel, DefaultDevice, ENU_OF_TO_NED, waypoint_set_enu(), waypoints, point::x, and point::y.
Here is the call graph for this function:| struct Amt amt |
Definition at line 33 of file approach_moving_target.c.
Referenced by approach_moving_target_enable(), and send_approach_moving_target().
| float amt_err_slowdown_gain = AMT_ERR_SLOWDOWN_GAIN |
Definition at line 31 of file approach_moving_target.c.
| struct AmtTelem amt_telem |
Definition at line 33 of file approach_moving_target.c.
Referenced by send_approach_moving_target().
| float approach_moving_target_angle_deg |
Definition at line 33 of file approach_moving_target.c.
| bool approach_moving_target_enabled = false |
Definition at line 56 of file approach_moving_target.c.