|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
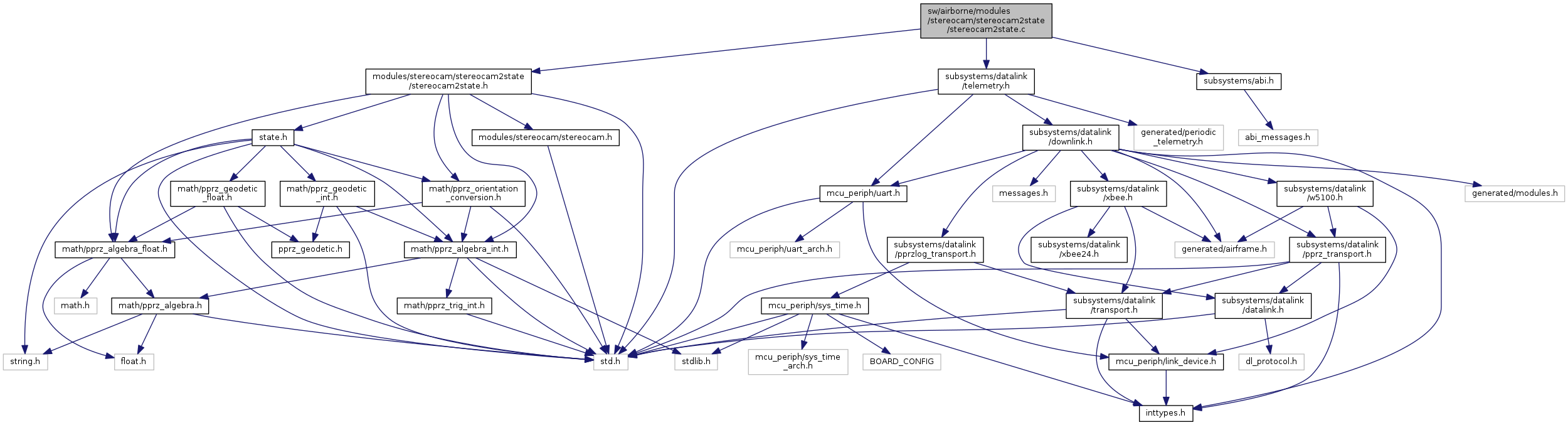
#include "modules/stereocam/stereocam2state/stereocam2state.h"#include "subsystems/abi.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for stereocam2state.c:
Include dependency graph for stereocam2state.c:Go to the source code of this file.
Macros | |
| #define | SENDER_ID 1 |
| #define | STEREOCAM_GPS_ID ABI_BROADCAST |
| ABI binding for gps messages. More... | |
| #define | USE_DEROTATION_OPTICFLOW FALSE |
| For extra functionality for derotation of velocity to state measurements. More... | |
| #define | STATE_MEASURE_OPTICFLOW TRUE |
Functions | |
| void | stereocam_to_state (float dphi, float dtheta) |
| static void | stereocam_gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| void | stereo_to_state_init (void) |
| void | stereo_to_state_periodic (void) |
Variables | |
| static abi_event | gps_ev |
| static float | prev_phi |
| static float | prev_theta |
| struct GpsStereoCam | gps_stereocam |
Definition in file stereocam2state.c.
| #define SENDER_ID 1 |
Definition at line 21 of file stereocam2state.c.
Referenced by stereocam_to_state().
| #define STATE_MEASURE_OPTICFLOW TRUE |
Definition at line 36 of file stereocam2state.c.
| #define STEREOCAM_GPS_ID ABI_BROADCAST |
ABI binding for gps messages.
Definition at line 26 of file stereocam2state.c.
Referenced by stereo_to_state_init().
| #define USE_DEROTATION_OPTICFLOW FALSE |
For extra functionality for derotation of velocity to state measurements.
Definition at line 33 of file stereocam2state.c.
| void stereo_to_state_init | ( | void | ) |
Definition at line 56 of file stereocam2state.c.
References stereocam_gps_cb(), and STEREOCAM_GPS_ID.
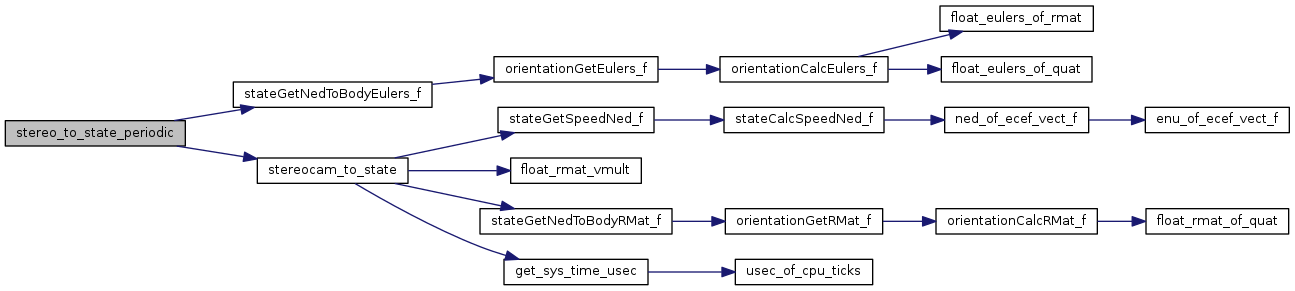
Here is the call graph for this function:| void stereo_to_state_periodic | ( | void | ) |
Definition at line 62 of file stereocam2state.c.
References uint8array::fresh, FloatEulers::phi, prev_phi, prev_theta, stateGetNedToBodyEulers_f(), stereocam_data, stereocam_to_state(), and FloatEulers::theta.
Here is the call graph for this function:Definition at line 46 of file stereocam2state.c.
References GpsStereoCam::ecef_vel, GpsState::ecef_vel, gps_stereocam, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by stereo_to_state_init().
Here is the caller graph for this function:| void stereocam_to_state | ( | float | dphi, |
| float | dtheta | ||
| ) |
Definition at line 79 of file stereocam2state.c.
References uint8array::data, DefaultChannel, DefaultDevice, GpsStereoCam::ecef_vel, float_rmat_vmult(), frequency, get_sys_time_usec(), gps_stereocam, uint8array::len, SENDER_ID, stateGetNedToBodyRMat_f(), stateGetSpeedNed_f(), stereocam_data, EcefCoor_i::x, FloatVect3::x, NedCoor_f::x, EcefCoor_i::y, FloatVect3::y, NedCoor_f::y, EcefCoor_i::z, and NedCoor_f::z.
Referenced by stereo_to_state_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 28 of file stereocam2state.c.
| struct GpsStereoCam gps_stereocam |
Definition at line 42 of file stereocam2state.c.
Referenced by stereocam_gps_cb(), and stereocam_to_state().
|
static |
Definition at line 39 of file stereocam2state.c.
Referenced by stereo_to_state_periodic().
|
static |
Definition at line 40 of file stereocam2state.c.
Referenced by stereo_to_state_periodic().
 1.8.8
1.8.8