|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
#include <iostream>#include <stdlib.h>#include <stdio.h>#include <FGFDMExec.h>#include <FGJSBBase.h>#include <initialization/FGInitialCondition.h>#include <models/FGPropulsion.h>#include <models/FGGroundReactions.h>#include <models/FGAccelerations.h>#include <models/FGAuxiliary.h>#include <models/FGAtmosphere.h>#include <models/FGAircraft.h>#include <models/FGFCS.h>#include <models/atmosphere/FGWinds.h>#include <models/propulsion/FGThruster.h>#include <models/propulsion/FGPropeller.h>#include "nps_autopilot.h"#include "nps_fdm.h"#include "math/pprz_geodetic.h"#include "math/pprz_geodetic_double.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_algebra.h"#include "math/pprz_algebra_float.h"#include "math/pprz_geodetic_wmm2015.h"#include "generated/airframe.h"#include "generated/flight_plan.h" Include dependency graph for nps_fdm_jsbsim.cpp:
Include dependency graph for nps_fdm_jsbsim.cpp:Go to the source code of this file.
Macros | |
| #define | MetersOfFeet(_f) ((_f)/3.2808399) |
| Macro to convert from feet to metres. More... | |
| #define | FeetOfMeters(_m) ((_m)*3.2808399) |
| #define | PascalOfPsf(_p) ((_p) * 47.8802588889) |
| #define | CelsiusOfRankine(_r) (((_r) - 491.67) / 1.8) |
| #define | NPS_JSBSIM_MODEL AIRFRAME_NAME |
| Name of the JSBSim model. More... | |
| #define | NPS_JSBSIM_PITCH_TRIM 0.0 |
| Trim values for the airframe. More... | |
| #define | NPS_JSBSIM_ROLL_TRIM 0.0 |
| #define | NPS_JSBSIM_YAW_TRIM 0.0 |
| #define | DEG2RAD 0.017 |
| Control surface deflections for visualisation. More... | |
| #define | NPS_JSBSIM_ELEVATOR_MAX_RAD (20.0*DEG2RAD) |
| #define | NPS_JSBSIM_AILERON_MAX_RAD (20.0*DEG2RAD) |
| #define | NPS_JSBSIM_RUDDER_MAX_RAD (20.0*DEG2RAD) |
| #define | NPS_JSBSIM_FLAP_MAX_RAD (20.0*DEG2RAD) |
| #define | MIN_DT (1.0/10240.0) |
| Minimum JSBSim timestep Around 1/10000 seems to be good for ground impacts. More... | |
Functions | |
| static void | feed_jsbsim (double *commands, int commands_nb) |
| Feed JSBSim with the latest actuator commands. More... | |
| static void | fetch_state (void) |
| Populates the NPS fdm struct after a simulation step. More... | |
| static int | check_for_nan (void) |
| Checks NpsFdm struct for NaNs. More... | |
| static void | jsbsimvec_to_vec (DoubleVect3 *fdm_vector, const FGColumnVector3 *jsb_vector) |
| Convert JSBSim vector format and struct to NPS vector format and struct. More... | |
| static void | jsbsimloc_to_loc (EcefCoor_d *fdm_location, const FGLocation *jsb_location) |
| Convert JSBSim location format and struct to NPS location format and struct. More... | |
| static void | jsbsimquat_to_quat (DoubleQuat *fdm_quat, const FGQuaternion *jsb_quat) |
| Convert JSBSim quaternion struct to NPS quaternion struct. More... | |
| static void | jsbsimvec_to_rate (DoubleRates *fdm_rate, const FGColumnVector3 *jsb_vector) |
| Convert JSBSim rates vector struct to NPS rates struct. More... | |
| static void | llh_from_jsbsim (LlaCoor_d *fdm_lla, FGPropagate *propagate) |
| Convert JSBSim location to NPS LLH. More... | |
| static void | lla_from_jsbsim_geodetic (LlaCoor_d *fdm_lla, FGPropagate *propagate) |
| Convert JSBSim location to NPS LLA. More... | |
| static void | lla_from_jsbsim_geocentric (LlaCoor_d *fdm_lla, FGPropagate *propagate) |
| Convert JSBSim location to NPS LLA. More... | |
| static void | init_jsbsim (double dt) |
| Initializes JSBSim. More... | |
| static void | init_ltp (void) |
| Initialize the ltp from the JSBSim location. More... | |
| void | nps_fdm_init (double dt) |
| Set JSBsim specific fields that are not used for Gazebo. More... | |
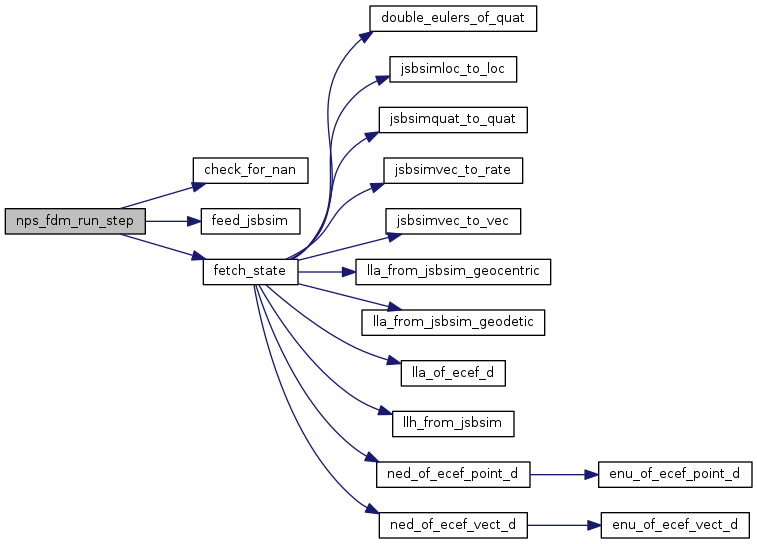
| void | nps_fdm_run_step (bool launch, double *commands, int commands_nb) |
| Update the simulation state. More... | |
| void | nps_fdm_set_wind (double speed, double dir) |
| void | nps_fdm_set_wind_ned (double wind_north, double wind_east, double wind_down) |
| void | nps_fdm_set_turbulence (double wind_speed, int turbulence_severity) |
| void | nps_fdm_set_temperature (double temp, double h) |
| Set temperature in degrees Celcius at given height h above MSL. More... | |
Variables | |
| struct NpsFdm | fdm |
| Holds all necessary NPS FDM state information. More... | |
| static FGFDMExec * | FDMExec |
| The JSBSim executive object. More... | |
| static struct LtpDef_d | ltpdef |
| static struct EcefCoor_d | offset |
| double | vehicle_radius_max |
| The largest distance between vehicle CG and contact point. More... | |
| double | min_dt |
| Timestep used for higher fidelity near the ground. More... | |
| #define CelsiusOfRankine | ( | _r | ) | (((_r) - 491.67) / 1.8) |
Definition at line 74 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
| #define DEG2RAD 0.017 |
Control surface deflections for visualisation.
Definition at line 106 of file nps_fdm_jsbsim.cpp.
| #define FeetOfMeters | ( | _m | ) | ((_m)*3.2808399) |
Definition at line 71 of file nps_fdm_jsbsim.cpp.
Referenced by init_jsbsim(), nps_fdm_run_step(), nps_fdm_set_turbulence(), nps_fdm_set_wind(), and nps_fdm_set_wind_ned().
| #define MetersOfFeet | ( | _f | ) | ((_f)/3.2808399) |
Macro to convert from feet to metres.
Definition at line 70 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state(), init_jsbsim(), jsbsimloc_to_loc(), jsbsimvec_to_vec(), lla_from_jsbsim_geocentric(), and lla_from_jsbsim_geodetic().
| #define MIN_DT (1.0/10240.0) |
Minimum JSBSim timestep Around 1/10000 seems to be good for ground impacts.
Definition at line 127 of file nps_fdm_jsbsim.cpp.
Referenced by nps_fdm_init().
| #define NPS_JSBSIM_AILERON_MAX_RAD (20.0*DEG2RAD) |
Definition at line 113 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
| #define NPS_JSBSIM_ELEVATOR_MAX_RAD (20.0*DEG2RAD) |
Definition at line 109 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
| #define NPS_JSBSIM_FLAP_MAX_RAD (20.0*DEG2RAD) |
Definition at line 121 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
| #define NPS_JSBSIM_MODEL AIRFRAME_NAME |
Name of the JSBSim model.
Defaults to the AIRFRAME_NAME
Definition at line 80 of file nps_fdm_jsbsim.cpp.
Referenced by init_jsbsim().
| #define NPS_JSBSIM_PITCH_TRIM 0.0 |
Trim values for the airframe.
Definition at line 92 of file nps_fdm_jsbsim.cpp.
Referenced by feed_jsbsim().
| #define NPS_JSBSIM_ROLL_TRIM 0.0 |
Definition at line 96 of file nps_fdm_jsbsim.cpp.
Referenced by feed_jsbsim().
| #define NPS_JSBSIM_RUDDER_MAX_RAD (20.0*DEG2RAD) |
Definition at line 117 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
| #define NPS_JSBSIM_YAW_TRIM 0.0 |
Definition at line 100 of file nps_fdm_jsbsim.cpp.
Referenced by feed_jsbsim().
| #define PascalOfPsf | ( | _p | ) | ((_p) * 47.8802588889) |
Definition at line 73 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state().
|
static |
Checks NpsFdm struct for NaNs.
Increments the NaN count on each new NaN
Definition at line 835 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, NpsFdm::body_ecef_accel, NpsFdm::body_ecef_rotaccel, NpsFdm::body_ecef_rotvel, NpsFdm::body_ecef_vel, NpsFdm::ecef_ecef_accel, NpsFdm::ecef_ecef_vel, NpsFdm::ecef_pos, NpsFdm::ecef_to_body_quat, fdm, NpsFdm::hmsl, LlaCoor_d::lat, NpsFdm::lla_pos, LlaCoor_d::lon, NpsFdm::ltp_ecef_accel, NpsFdm::ltp_ecef_vel, NpsFdm::ltp_g, NpsFdm::ltp_h, NpsFdm::ltp_to_body_eulers, NpsFdm::ltp_to_body_quat, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, NpsFdm::ltpprz_to_body_eulers, NpsFdm::ltpprz_to_body_quat, NpsFdm::nan_count, DoubleRates::p, DoubleEulers::phi, DoubleEulers::psi, DoubleRates::q, DoubleQuat::qi, DoubleQuat::qx, DoubleQuat::qy, DoubleQuat::qz, DoubleRates::r, DoubleEulers::theta, DoubleVect3::x, EcefCoor_d::x, NedCoor_d::x, DoubleVect3::y, EcefCoor_d::y, NedCoor_d::y, DoubleVect3::z, EcefCoor_d::z, and NedCoor_d::z.
Referenced by nps_fdm_run_step().
Here is the caller graph for this function:
|
static |
Feed JSBSim with the latest actuator commands.
| commands | Pointer to array of doubles holding actuator commands |
| commands_nb | Number of commands (length of array) |
Definition at line 294 of file nps_fdm_jsbsim.cpp.
References FDMExec, NPS_JSBSIM_PITCH_TRIM, NPS_JSBSIM_ROLL_TRIM, and NPS_JSBSIM_YAW_TRIM.
Referenced by init_jsbsim(), and nps_fdm_run_step().
Here is the caller graph for this function:
|
static |
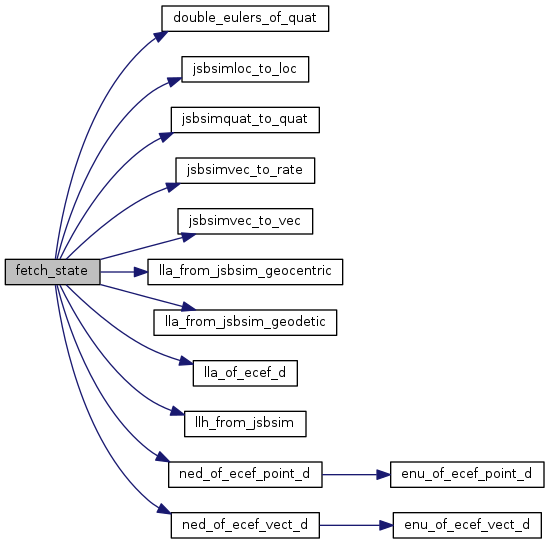
Populates the NPS fdm struct after a simulation step.
Definition at line 353 of file nps_fdm_jsbsim.cpp.
References NpsFdm::agl, NpsFdm::airspeed, NpsFdm::aoa, NpsFdm::body_accel, NpsFdm::body_ecef_accel, NpsFdm::body_ecef_rotaccel, NpsFdm::body_ecef_rotvel, NpsFdm::body_ecef_vel, NpsFdm::body_inertial_accel, NpsFdm::body_inertial_rotaccel, NpsFdm::body_inertial_rotvel, CelsiusOfRankine, double_eulers_of_quat(), NpsFdm::dynamic_pressure, NpsFdm::ecef_ecef_accel, NpsFdm::ecef_ecef_vel, NpsFdm::ecef_pos, NpsFdm::elevator, NpsFdm::eng_state, EULERS_COPY, fdm, FDMExec, NpsFdm::flap, NpsFdm::hmsl, jsbsimloc_to_loc(), jsbsimquat_to_quat(), jsbsimvec_to_rate(), jsbsimvec_to_vec(), NpsFdm::left_aileron, lla_from_jsbsim_geocentric(), lla_from_jsbsim_geodetic(), lla_of_ecef_d(), NpsFdm::lla_pos, NpsFdm::lla_pos_geoc, NpsFdm::lla_pos_geod, NpsFdm::lla_pos_pprz, llh_from_jsbsim(), NpsFdm::ltp_ecef_accel, NpsFdm::ltp_ecef_vel, NpsFdm::ltp_to_body_eulers, NpsFdm::ltp_to_body_quat, ltpdef, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, NpsFdm::ltpprz_to_body_eulers, NpsFdm::ltpprz_to_body_quat, MetersOfFeet, ned_of_ecef_point_d(), ned_of_ecef_vect_d(), NPS_JSBSIM_AILERON_MAX_RAD, NPS_JSBSIM_ELEVATOR_MAX_RAD, NPS_JSBSIM_FLAP_MAX_RAD, NPS_JSBSIM_RUDDER_MAX_RAD, NpsFdm::num_engines, NpsFdm::on_ground, PascalOfPsf, NpsFdm::pressure, NpsFdm::pressure_sl, QUAT_COPY, NpsFdm::right_aileron, NpsFdm::rpm, NpsFdm::rudder, NpsFdm::sideslip, NpsFdm::temperature, NpsFdm::time, NpsFdm::total_pressure, NpsFdm::wind, DoubleVect3::x, EcefCoor_d::x, NedCoor_d::x, DoubleVect3::y, EcefCoor_d::y, NedCoor_d::y, DoubleVect3::z, EcefCoor_d::z, and NedCoor_d::z.
Referenced by nps_fdm_init(), and nps_fdm_run_step().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
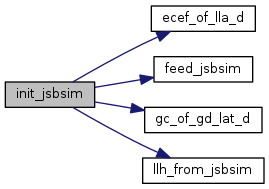
Initializes JSBSim.
Sets up the JSBSim executive and loads initial conditions Exits NPS with -1 if models or ICs fail to load
| dt | The desired simulation timestep |
Definition at line 518 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, ecef_of_lla_d(), FDMExec, feed_jsbsim(), FeetOfMeters, gc_of_gd_lat_d(), LlaCoor_d::lat, llh_from_jsbsim(), LlaCoor_d::lon, MetersOfFeet, NPS_COMMANDS_NB, NPS_JSBSIM_MODEL, offset, radius, VECT3_DIFF, and vehicle_radius_max.
Referenced by nps_fdm_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
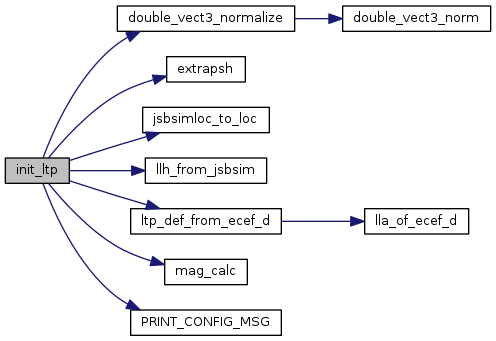
Initialize the ltp from the JSBSim location.
properly get current time
Definition at line 652 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, double_vect3_normalize(), NpsFdm::ecef_pos, EXT_COEFF1, EXT_COEFF2, EXT_COEFF3, extrapsh(), fdm, FDMExec, GEO_EPOCH, IEXT, jsbsimloc_to_loc(), LlaCoor_d::lat, NpsFdm::lla_pos, llh_from_jsbsim(), LlaCoor_d::lon, ltp_def_from_ecef_d(), NpsFdm::ltp_g, NpsFdm::ltp_h, ltpdef, mag_calc(), MAXCOEFF, NMAX_1, NMAX_2, PRINT_CONFIG_MSG(), DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by nps_fdm_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Convert JSBSim location format and struct to NPS location format and struct.
JSBSim is in feet by default, NPS in metres
| fdm_location | Pointer to EcefCoor_d struct |
| jsb_location | Pointer to FGLocation struct |
Definition at line 710 of file nps_fdm_jsbsim.cpp.
References MetersOfFeet, offset, VECT3_ADD, EcefCoor_d::x, EcefCoor_d::y, and EcefCoor_d::z.
Referenced by fetch_state(), and init_ltp().
Here is the caller graph for this function:
|
static |
Convert JSBSim quaternion struct to NPS quaternion struct.
| fdm_quat | Pointer to DoubleQuat struct |
| jsb_quat | Pointer to FGQuaternion struct |
Definition at line 743 of file nps_fdm_jsbsim.cpp.
References DoubleQuat::qi, DoubleQuat::qx, DoubleQuat::qy, and DoubleQuat::qz.
Referenced by fetch_state().
Here is the caller graph for this function:
|
static |
Convert JSBSim rates vector struct to NPS rates struct.
| fdm_rate | Pointer to DoubleRates struct |
| jsb_vector | Pointer to FGColumnVector3 struct |
Definition at line 759 of file nps_fdm_jsbsim.cpp.
References DoubleRates::p, DoubleRates::q, and DoubleRates::r.
Referenced by fetch_state().
Here is the caller graph for this function:
|
static |
Convert JSBSim vector format and struct to NPS vector format and struct.
JSBSim is in feet by default, NPS in metres
| fdm_vector | Pointer to DoubleVect3 struct |
| jsb_vector | Pointer to FGColumnVector3 struct |
Definition at line 728 of file nps_fdm_jsbsim.cpp.
References MetersOfFeet, DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by fetch_state().
Here is the caller graph for this function:
|
static |
Convert JSBSim location to NPS LLA.
Gets geocentric latitude, longitude and geocentric radius
| fdm_lla | Pointer to LlaCoor_d struct |
| propagate | Pointer to JSBSim FGPropagate object |
Definition at line 796 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, LlaCoor_d::lat, LlaCoor_d::lon, and MetersOfFeet.
Referenced by fetch_state().
Here is the caller graph for this function:
|
static |
Convert JSBSim location to NPS LLA.
Gets geodetic latitude, longitude and geodetic altitude in metres
| fdm_lla | Pointer to LlaCoor_d struct |
| propagate | Pointer to JSBSim FGPropagate object |
Definition at line 813 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, LlaCoor_d::lat, LlaCoor_d::lon, and MetersOfFeet.
Referenced by fetch_state().
Here is the caller graph for this function:
|
static |
Convert JSBSim location to NPS LLH.
Gets geodetic latitude, longitude and height above sea level in metres
| fdm_lla | Pointer to LlaCoor_d struct |
| propagate | Pointer to JSBSim FGPropagate object |
Definition at line 776 of file nps_fdm_jsbsim.cpp.
References LlaCoor_d::alt, LlaCoor_d::lat, and LlaCoor_d::lon.
Referenced by fetch_state(), init_jsbsim(), and init_ltp().
Here is the caller graph for this function:| void nps_fdm_init | ( | double | dt | ) |
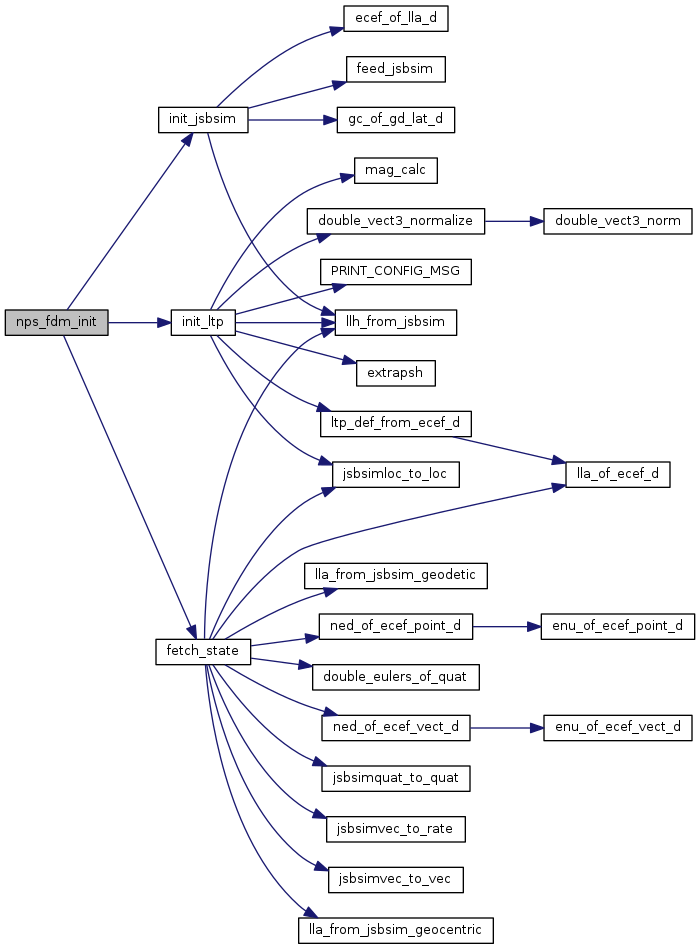
Set JSBsim specific fields that are not used for Gazebo.
| dt |
Definition at line 166 of file nps_fdm_jsbsim.cpp.
References NpsFdm::curr_dt, fdm, FDMExec, fetch_state(), NpsFdm::init_dt, init_jsbsim(), init_ltp(), MIN_DT, min_dt, NpsFdm::nan_count, offset, and VECT3_ASSIGN.
Referenced by nps_main_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nps_fdm_run_step | ( | bool | launch, |
| double * | commands, | ||
| int | commands_nb | ||
| ) |
Update the simulation state.
| launch | |
| commands | |
| commands_nb |
Definition at line 193 of file nps_fdm_jsbsim.cpp.
References NpsFdm::agl, check_for_nan(), NpsFdm::curr_dt, FALSE, fdm, FDMExec, feed_jsbsim(), FeetOfMeters, fetch_state(), NpsFdm::init_dt, NpsFdm::ltp_ecef_vel, min_dt, NpsFdm::nan_count, NpsFdm::time, TRUE, vehicle_radius_max, and NedCoor_d::z.
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:| void nps_fdm_set_temperature | ( | double | temp, |
| double | h | ||
| ) |
Set temperature in degrees Celcius at given height h above MSL.
Definition at line 283 of file nps_fdm_jsbsim.cpp.
References FDMExec.
| void nps_fdm_set_turbulence | ( | double | wind_speed, |
| int | turbulence_severity | ||
| ) |
Definition at line 275 of file nps_fdm_jsbsim.cpp.
References FDMExec, and FeetOfMeters.
Referenced by nps_atmosphere_update().
Here is the caller graph for this function:| void nps_fdm_set_wind | ( | double | speed, |
| double | dir | ||
| ) |
Definition at line 261 of file nps_fdm_jsbsim.cpp.
References FDMExec, and FeetOfMeters.
| void nps_fdm_set_wind_ned | ( | double | wind_north, |
| double | wind_east, | ||
| double | wind_down | ||
| ) |
Definition at line 268 of file nps_fdm_jsbsim.cpp.
References FDMExec, and FeetOfMeters.
Referenced by nps_atmosphere_update().
Here is the caller graph for this function:| struct NpsFdm fdm |
Holds all necessary NPS FDM state information.
Definition at line 150 of file nps_fdm_jsbsim.cpp.
Referenced by check_for_nan(), fetch_state(), gps_feed_value(), init_ltp(), nps_fdm_init(), nps_fdm_run_step(), nps_flightgear_send(), nps_flightgear_send_fdm(), nps_ins_data_loop(), nps_ivy_send_WORLD_ENV_REQ(), nps_main_display(), nps_main_loop(), nps_sensor_accel_run_step(), nps_sensor_airspeed_run_step(), nps_sensor_aoa_run_step(), nps_sensor_baro_run_step(), nps_sensor_gps_run_step(), nps_sensor_gyro_run_step(), nps_sensor_mag_run_step(), nps_sensor_sideslip_run_step(), nps_sensor_sonar_run_step(), nps_sensor_temperature_run_step(), sim_overwrite_ahrs(), and sim_overwrite_ins().
|
static |
The JSBSim executive object.
Definition at line 153 of file nps_fdm_jsbsim.cpp.
Referenced by feed_jsbsim(), fetch_state(), init_jsbsim(), init_ltp(), nps_fdm_init(), nps_fdm_run_step(), nps_fdm_set_temperature(), nps_fdm_set_turbulence(), nps_fdm_set_wind(), and nps_fdm_set_wind_ned().
|
static |
Definition at line 155 of file nps_fdm_jsbsim.cpp.
Referenced by fetch_state(), and init_ltp().
| double min_dt |
Timestep used for higher fidelity near the ground.
Definition at line 164 of file nps_fdm_jsbsim.cpp.
Referenced by nps_fdm_init(), and nps_fdm_run_step().
|
static |
Definition at line 158 of file nps_fdm_jsbsim.cpp.
Referenced by init_jsbsim(), jsbsimloc_to_loc(), and nps_fdm_init().
| double vehicle_radius_max |
The largest distance between vehicle CG and contact point.
Definition at line 161 of file nps_fdm_jsbsim.cpp.
Referenced by init_jsbsim(), and nps_fdm_run_step().
 1.8.8
1.8.8