|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
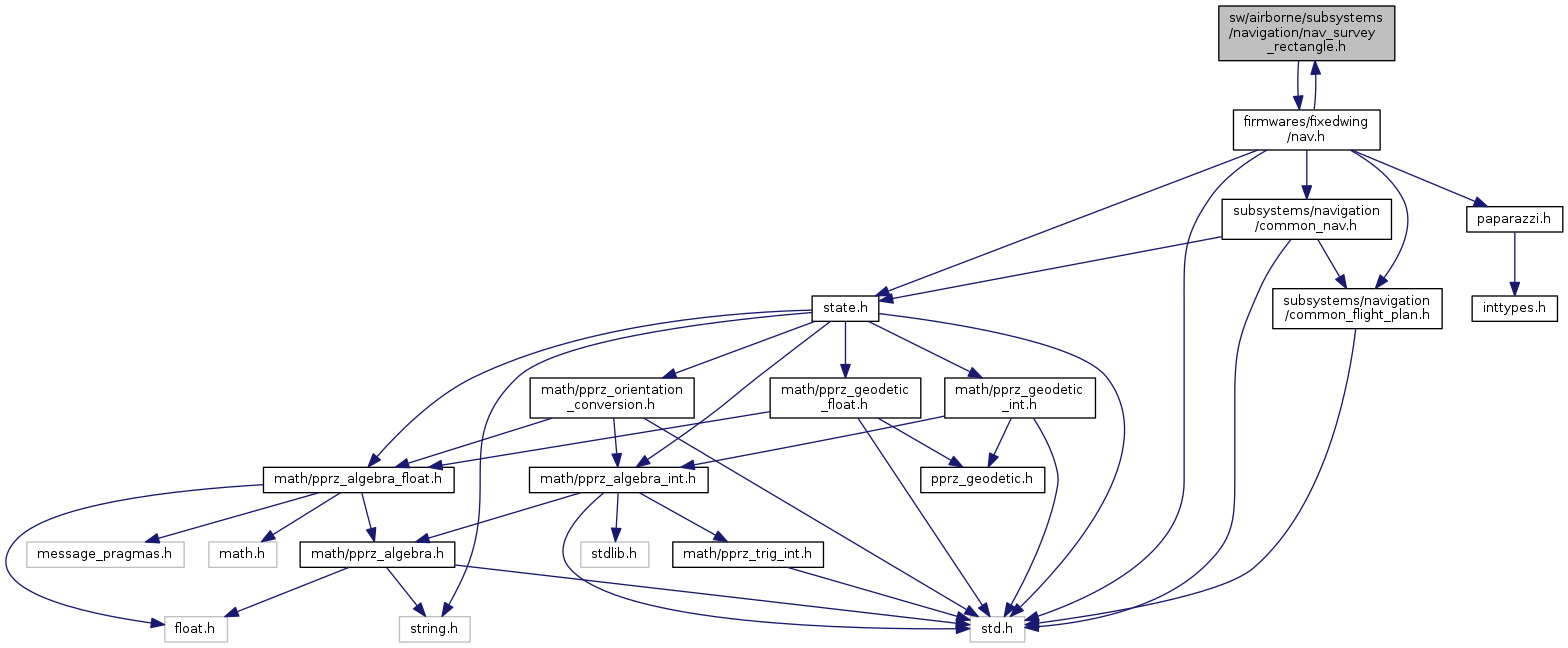
#include "firmwares/fixedwing/nav.h" Include dependency graph for nav_survey_rectangle.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_survey_rectangle.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | NavSurveyRectangleInit(_wp1, _wp2, _grid, _orientation) nav_survey_rectangle_init(_wp1, _wp2, _grid, _orientation) |
| #define | NavSurveyRectangle(_wp1, _wp2) nav_survey_rectangle(_wp1, _wp2) |
Enumerations | |
| enum | survey_orientation_t { NS, WE, NS, WE } |
Functions | |
| void | nav_survey_rectangle_init (uint8_t wp1, uint8_t wp2, float grid, survey_orientation_t so) |
| void | nav_survey_rectangle (uint8_t wp1, uint8_t wp2) |
| #define NavSurveyRectangle | ( | _wp1, | |
| _wp2 | |||
| ) | nav_survey_rectangle(_wp1, _wp2) |
Definition at line 41 of file nav_survey_rectangle.h.
| #define NavSurveyRectangleInit | ( | _wp1, | |
| _wp2, | |||
| _grid, | |||
| _orientation | |||
| ) | nav_survey_rectangle_init(_wp1, _wp2, _grid, _orientation) |
Definition at line 40 of file nav_survey_rectangle.h.
| enum survey_orientation_t |
| Enumerator | |
|---|---|
| NS | |
| WE | |
| NS | |
| WE | |
Definition at line 35 of file nav_survey_rectangle.h.
Do half a circle around WP 0
Do half a circle around WP 0
Definition at line 90 of file nav_survey_rectangle.c.
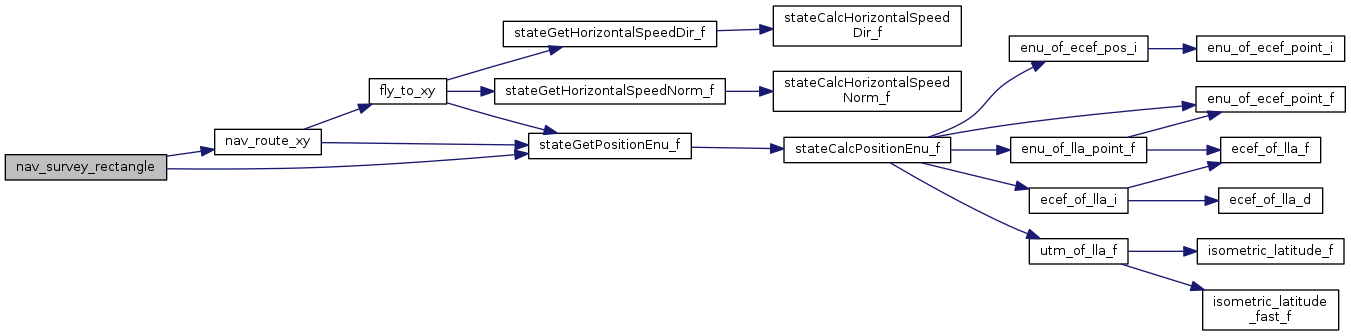
References LINE_START_FUNCTION, LINE_STOP_FUNCTION, Max, Min, nav_in_circle, nav_in_segment, nav_route_xy(), nav_survey_active, nav_survey_east, nav_survey_north, nav_survey_shift, nav_survey_south, nav_survey_west, NavCircleWaypoint, NavCourseCloseTo, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, NS, stateGetPositionEnu_f(), survey_from, survey_to, survey_uturn, SurveyGoingEast, SurveyGoingNorth, SurveyGoingSouth, SurveyGoingWest, WaypointAlt, waypoints, WaypointX, WaypointY, point::x, and point::y.
Here is the call graph for this function:| void nav_survey_rectangle_init | ( | uint8_t | wp1, |
| uint8_t | wp2, | ||
| float | grid, | ||
| survey_orientation_t | so | ||
| ) |
Definition at line 53 of file nav_survey_rectangle.c.
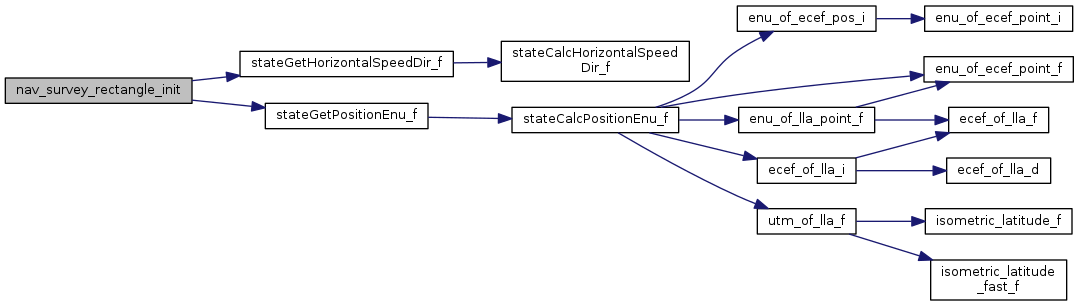
References LINE_START_FUNCTION, Max, Min, nav_survey_east, nav_survey_north, nav_survey_shift, nav_survey_south, nav_survey_west, NS, stateGetHorizontalSpeedDir_f(), stateGetPositionEnu_f(), survey_from, survey_to, survey_uturn, WaypointX, WaypointY, point::x, and point::y.
Here is the call graph for this function: 1.8.8
1.8.8