|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Reference generation for vertical guidance. More...
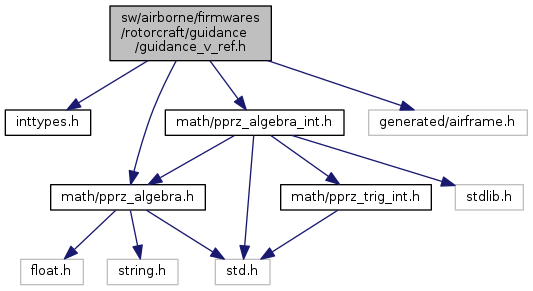
#include "inttypes.h"#include "math/pprz_algebra.h"#include "math/pprz_algebra_int.h"#include "generated/airframe.h" Include dependency graph for guidance_v_ref.h: This graph shows which files directly or indirectly include this file:
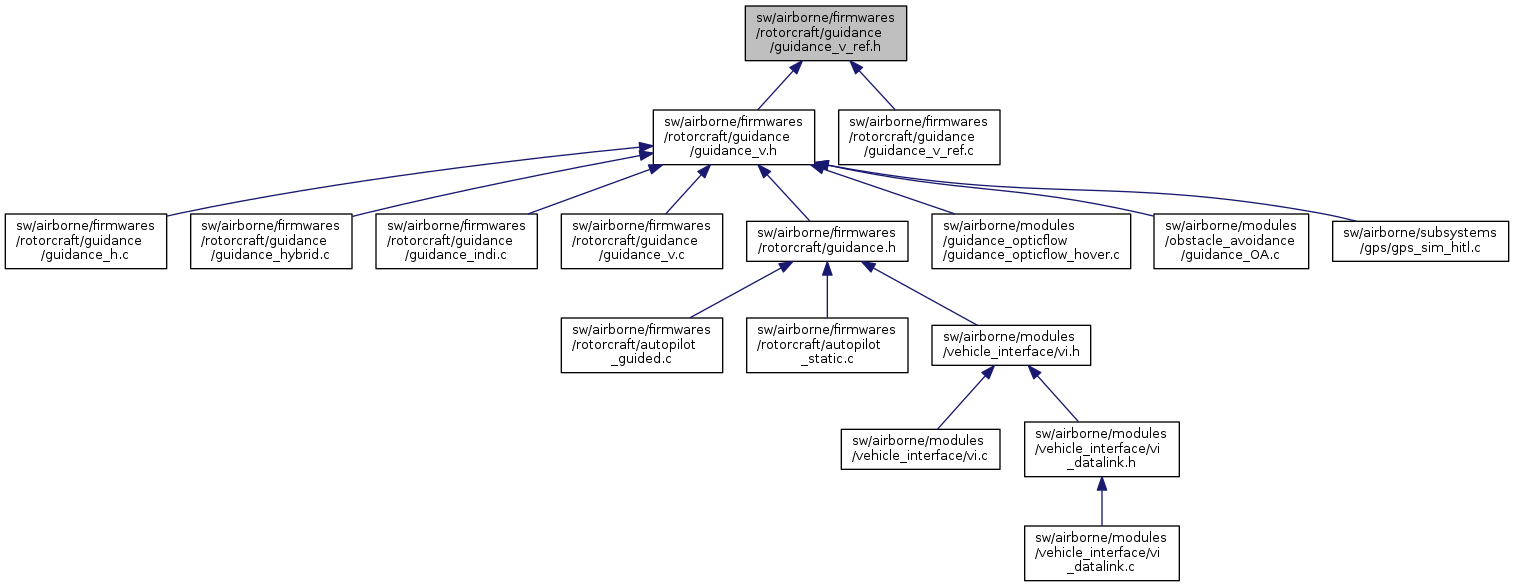
Include dependency graph for guidance_v_ref.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_V_REF_MIN_ZD (-3.) |
| #define | GUIDANCE_V_REF_MAX_ZD ( 3.) |
| #define | GV_FREQ_FRAC 9 |
| Update frequency. More... | |
| #define | GV_FREQ (1<<GV_FREQ_FRAC) |
| #define | GV_ZDD_REF_FRAC 8 |
| number of bits for the fractional part of gv_zdd_ref More... | |
| #define | GV_ZD_REF_FRAC (GV_ZDD_REF_FRAC + GV_FREQ_FRAC) |
| number of bits for the fractional part of gv_zd_ref More... | |
| #define | GV_Z_REF_FRAC (GV_ZD_REF_FRAC + GV_FREQ_FRAC) |
| number of bits for the fractional part of gv_z_ref More... | |
Functions | |
| void | gv_set_ref (int32_t alt, int32_t speed, int32_t accel) |
| void | gv_update_ref_from_z_sp (int32_t z_sp) |
| void | gv_update_ref_from_zd_sp (int32_t zd_sp, int32_t z_pos) |
| update vertical reference from speed setpoint. More... | |
Variables | |
| int32_t | gv_zdd_ref |
| reference model vertical accel in meters/s^2 (output) fixed point representation with GV_ZDD_REF_FRAC Q23.8 : accuracy 0.0039 , range 8388km/s^2 More... | |
| int32_t | gv_zd_ref |
| reference model vertical speed in meters/sec (output) fixed point representation with GV_ZD_REF_FRAC Q14.17 : accuracy 0.0000076 , range 16384m/s2 More... | |
| int64_t | gv_z_ref |
| reference model altitude in meters (output) fixed point representation with GV_Z_REF_FRAC Q37.26 : More... | |
Reference generation for vertical guidance.
Definition in file guidance_v_ref.h.
| #define GUIDANCE_V_REF_MAX_ZD ( 3.) |
Definition at line 41 of file guidance_v_ref.h.
| #define GUIDANCE_V_REF_MIN_ZD (-3.) |
Definition at line 37 of file guidance_v_ref.h.
| #define GV_FREQ (1<<GV_FREQ_FRAC) |
Definition at line 48 of file guidance_v_ref.h.
| #define GV_FREQ_FRAC 9 |
Update frequency.
Definition at line 47 of file guidance_v_ref.h.
| #define GV_Z_REF_FRAC (GV_ZD_REF_FRAC + GV_FREQ_FRAC) |
number of bits for the fractional part of gv_z_ref
Definition at line 75 of file guidance_v_ref.h.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
| #define GV_ZD_REF_FRAC (GV_ZDD_REF_FRAC + GV_FREQ_FRAC) |
number of bits for the fractional part of gv_zd_ref
Definition at line 66 of file guidance_v_ref.h.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
| #define GV_ZDD_REF_FRAC 8 |
number of bits for the fractional part of gv_zdd_ref
Definition at line 57 of file guidance_v_ref.h.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
Definition at line 87 of file guidance_v_ref.c.
References gv_z_ref, GV_Z_REF_FRAC, gv_zd_ref, GV_ZD_REF_FRAC, gv_zdd_ref, GV_ZDD_REF_FRAC, INT32_ACCEL_FRAC, INT32_POS_FRAC, and INT32_SPEED_FRAC.
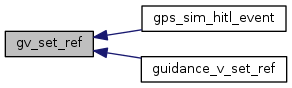
Referenced by gps_sim_hitl_event(), and guidance_v_set_ref().
Here is the caller graph for this function:| void gv_update_ref_from_z_sp | ( | int32_t | z_sp | ) |
Definition at line 95 of file guidance_v_ref.c.
References GV_MAX_ZD, GV_MAX_ZDD, GV_MIN_ZD, GV_MIN_ZDD, GV_OMEGA_2, GV_OMEGA_2_FRAC, gv_z_ref, GV_Z_REF_FRAC, gv_zd_ref, GV_ZD_REF_FRAC, gv_zdd_ref, GV_ZDD_REF_FRAC, GV_ZETA_OMEGA, GV_ZETA_OMEGA_FRAC, and INT32_POS_FRAC.
Referenced by guidance_v_from_nav(), and guidance_v_guided_run().
Here is the caller graph for this function:update vertical reference from speed setpoint.
| zd_sp | vertical speed setpoint with INT32_SPEED_FRAC |
| z_pos | current vertical position (z-down) with INT32_POS_FRAC |
Definition at line 129 of file guidance_v_ref.c.
References GV_MAX_Z_DIFF, GV_MAX_ZD, GV_MAX_ZDD, GV_MIN_ZD, GV_MIN_ZDD, GV_REF_INV_THAU, GV_REF_INV_THAU_FRAC, gv_z_ref, GV_Z_REF_FRAC, gv_zd_ref, GV_ZD_REF_FRAC, gv_zdd_ref, GV_ZDD_REF_FRAC, INT32_POS_FRAC, and INT32_SPEED_FRAC.
Referenced by guidance_v_from_nav(), guidance_v_guided_run(), and guidance_v_run().
Here is the caller graph for this function:| int64_t gv_z_ref |
reference model altitude in meters (output) fixed point representation with GV_Z_REF_FRAC Q37.26 :
Definition at line 47 of file guidance_v_ref.c.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
| int32_t gv_zd_ref |
reference model vertical speed in meters/sec (output) fixed point representation with GV_ZD_REF_FRAC Q14.17 : accuracy 0.0000076 , range 16384m/s2
Definition at line 41 of file guidance_v_ref.c.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
| int32_t gv_zdd_ref |
reference model vertical accel in meters/s^2 (output) fixed point representation with GV_ZDD_REF_FRAC Q23.8 : accuracy 0.0039 , range 8388km/s^2
Definition at line 35 of file guidance_v_ref.c.
Referenced by gv_set_ref(), gv_update_ref_from_z_sp(), gv_update_ref_from_zd_sp(), and run_hover_loop().
 1.8.8
1.8.8