|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
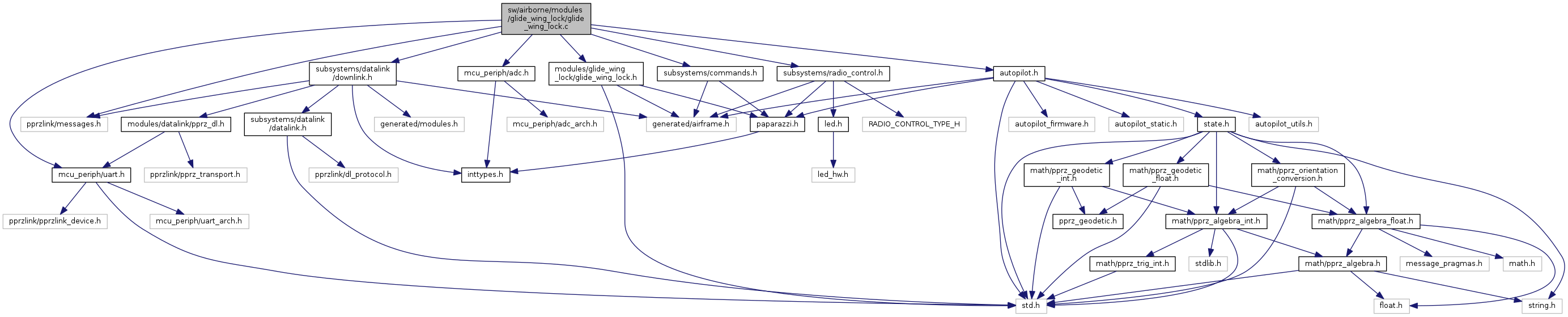
#include "modules/glide_wing_lock/glide_wing_lock.h"#include "pprzlink/messages.h"#include "mcu_periph/uart.h"#include "subsystems/datalink/downlink.h"#include "mcu_periph/adc.h"#include "subsystems/commands.h"#include "subsystems/radio_control.h"#include "autopilot.h" Include dependency graph for glide_wing_lock.c:
Include dependency graph for glide_wing_lock.c:Go to the source code of this file.
Macros | |
| #define | WING_POS_DOWN_THRESH 100 |
| #define | WING_POS_LOCK_MIN_THRESH 2000 |
| #define | WING_POS_LOCK_MAX_THRESH 2100 |
| #define | WING_POS_NOMINAL_THRUST 5000 |
| #define | WING_POS_LOCK_SWITCH RADIO_AUX2 |
Functions | |
| void | glide_wing_lock_init (void) |
| void | glide_wing_lock_event () |
| void | glide_wing_lock_periodic () |
| void | set_rotorcraft_commands (pprz_t *cmd_out, int32_t *cmd_in, bool in_flight, bool motors_on) |
| Set Rotorcraft commands. More... | |
Variables | |
| struct adc_buf | adcbuf |
| int | lock_wings |
Definition in file glide_wing_lock.c.
| #define WING_POS_DOWN_THRESH 100 |
Definition at line 42 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event().
| #define WING_POS_LOCK_MAX_THRESH 2100 |
Definition at line 48 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event().
| #define WING_POS_LOCK_MIN_THRESH 2000 |
Definition at line 45 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event().
| #define WING_POS_LOCK_SWITCH RADIO_AUX2 |
Definition at line 54 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event().
| #define WING_POS_NOMINAL_THRUST 5000 |
Definition at line 51 of file glide_wing_lock.c.
Referenced by set_rotorcraft_commands().
| void glide_wing_lock_event | ( | void | ) |
Definition at line 63 of file glide_wing_lock.c.
References adcbuf, adc_buf::av_nb_sample, lock_wings, MIN_PPRZ, radio_control, adc_buf::sum, RadioControl::values, WING_POS_DOWN_THRESH, WING_POS_LOCK_MAX_THRESH, WING_POS_LOCK_MIN_THRESH, and WING_POS_LOCK_SWITCH.
| void glide_wing_lock_init | ( | void | ) |
Definition at line 58 of file glide_wing_lock.c.
References adc_buf_channel(), and adcbuf.
Here is the call graph for this function:| void glide_wing_lock_periodic | ( | void | ) |
Definition at line 101 of file glide_wing_lock.c.
References adcbuf, adc_buf::av_nb_sample, DefaultChannel, DefaultDevice, and adc_buf::sum.
Set Rotorcraft commands.
Limit thrust and/or yaw depending of the in_flight and motors_on flag status
A default implementation is provided, but the function can be redefined
| [out] | cmd_out | output command vector in pprz_t (usually commands array) |
| in/out] | cmd_in input commands to apply, might be affected by in_flight and motors_on param (FIXME really ?) | |
| [in] | in_flight | tells if rotorcraft is in flight |
| [in] | motors_on | tells if motors are running |
Set Rotorcraft commands.
RADIO_MODE switch just selectes between MANUAL and AUTO. If not MANUAL, the RADIO_AUTO_MODE switch selects between AUTO1 and AUTO2.
This is mainly a cludge for entry level radios with no three-way switch, but two available two-way switches which can be used.Set Rotorcraft commands. Limit thrust and/or yaw depending of the in_flight and motors_on flag status
Definition at line 107 of file glide_wing_lock.c.
References lock_wings, and WING_POS_NOMINAL_THRUST.
| struct adc_buf adcbuf |
Definition at line 37 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event(), glide_wing_lock_init(), and glide_wing_lock_periodic().
| int lock_wings |
Definition at line 39 of file glide_wing_lock.c.
Referenced by glide_wing_lock_event(), and set_rotorcraft_commands().
 1.8.8
1.8.8