|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
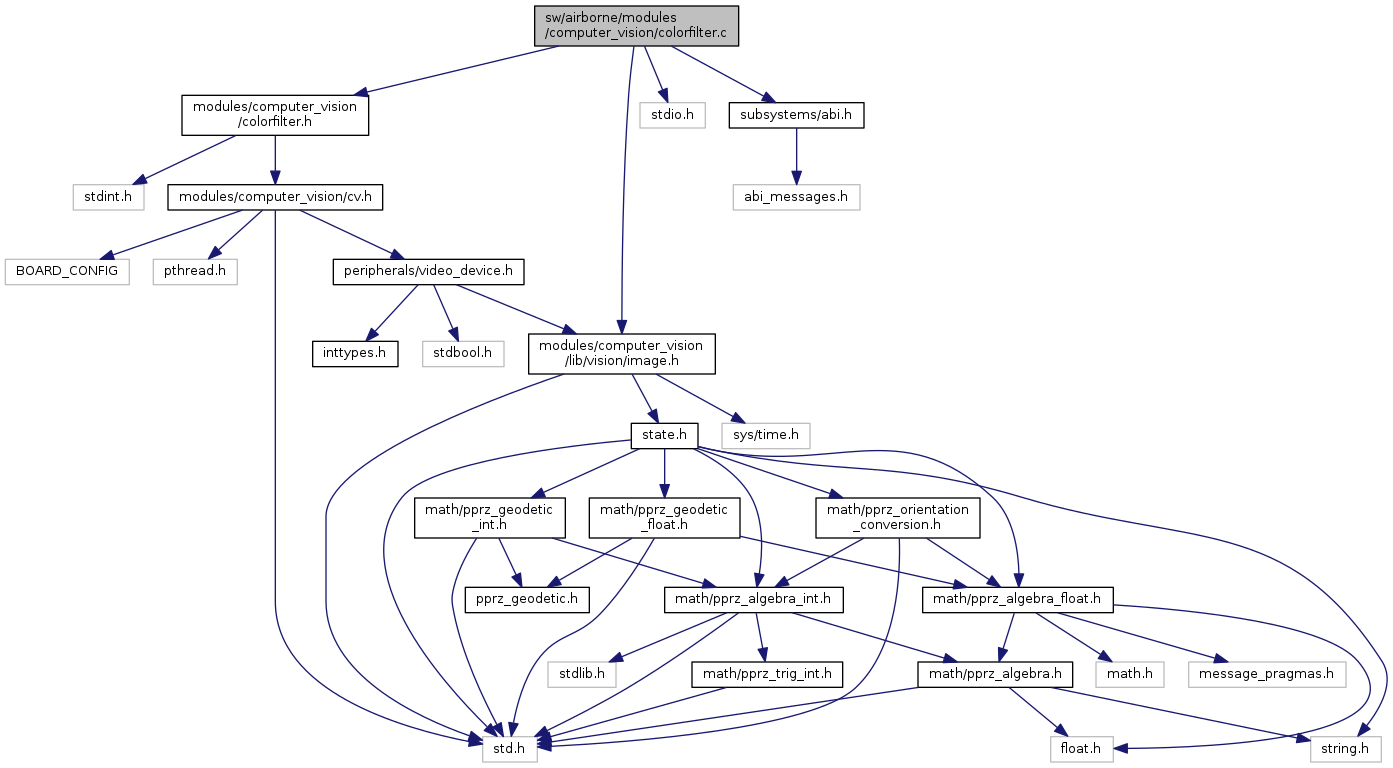
#include "modules/computer_vision/colorfilter.h"#include <stdio.h>#include "modules/computer_vision/lib/vision/image.h"#include "subsystems/abi.h" Include dependency graph for colorfilter.c:
Include dependency graph for colorfilter.c:Go to the source code of this file.
Macros | |
| #define | COLORFILTER_FPS 0 |
| Default FPS (zero means run at camera fps) More... | |
| #define | COLORFILTER_SEND_OBSTACLE FALSE |
| Default sonar/agl to use in opticflow visual_estimator. More... | |
Functions | |
| struct image_t * | colorfilter_func (struct image_t *img) |
| void | colorfilter_init (void) |
Variables | |
| struct video_listener * | listener = NULL |
| uint8_t | color_lum_min = 105 |
| uint8_t | color_lum_max = 205 |
| uint8_t | color_cb_min = 52 |
| uint8_t | color_cb_max = 140 |
| uint8_t | color_cr_min = 180 |
| uint8_t | color_cr_max = 255 |
| int | color_count = 0 |
| #define COLORFILTER_FPS 0 |
Default FPS (zero means run at camera fps)
Definition at line 33 of file colorfilter.c.
Referenced by colorfilter_init().
| #define COLORFILTER_SEND_OBSTACLE FALSE |
Default sonar/agl to use in opticflow visual_estimator.
Definition at line 39 of file colorfilter.c.
Referenced by colorfilter_func().
Definition at line 62 of file colorfilter.c.
References COLORFILTER_SEND_OBSTACLE, CV_COLORDETECTION, and image_yuv422_colorfilt().
Referenced by colorfilter_init().
Here is the call graph for this function: Here is the caller graph for this function:| void colorfilter_init | ( | void | ) |
Definition at line 85 of file colorfilter.c.
References COLORFILTER_FPS, colorfilter_func(), cv_add_to_device(), and listener.
Here is the call graph for this function:| uint8_t color_cb_max = 140 |
Definition at line 49 of file colorfilter.c.
Referenced by orange_avoider_init().
| uint8_t color_cb_min = 52 |
Definition at line 48 of file colorfilter.c.
Referenced by orange_avoider_init().
| int color_count = 0 |
Definition at line 54 of file colorfilter.c.
Referenced by orange_avoider_periodic().
| uint8_t color_cr_max = 255 |
Definition at line 51 of file colorfilter.c.
Referenced by orange_avoider_init().
| uint8_t color_cr_min = 180 |
Definition at line 50 of file colorfilter.c.
Referenced by orange_avoider_init().
| uint8_t color_lum_max = 205 |
Definition at line 47 of file colorfilter.c.
Referenced by orange_avoider_init().
| uint8_t color_lum_min = 105 |
Definition at line 46 of file colorfilter.c.
Referenced by orange_avoider_init().
| struct video_listener* listener = NULL |
Definition at line 43 of file colorfilter.c.
Referenced by colorfilter_init(), cv_add_to_device(), cv_add_to_device_async(), cv_async_thread(), and cv_run_device().
 1.8.8
1.8.8