|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
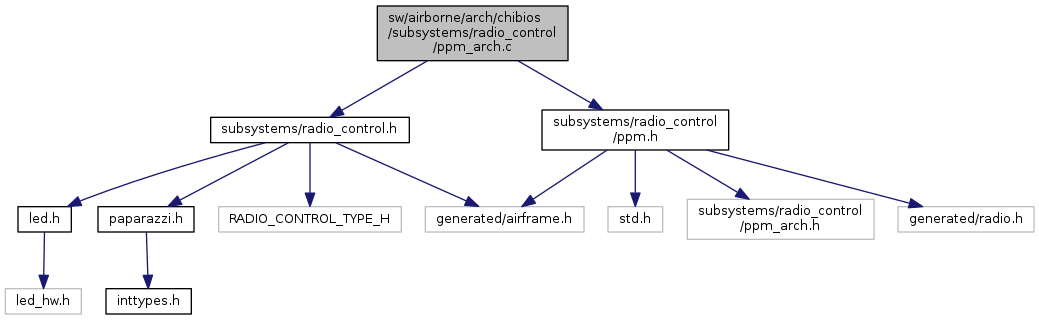
PPM interface between ChibiOS and Paparazzi. More...
 Include dependency graph for ppm_arch.c:
Include dependency graph for ppm_arch.c:Go to the source code of this file.
Functions | |
| static void | icuperiodcb (ICUDriver *icup) |
| PPM Pulse period callback. More... | |
| static void | icuoverflowcb (ICUDriver *icup) |
| PPM Overflow callback. More... | |
| void | ppm_arch_init (void) |
| Architecture dependant code. More... | |
Variables | |
| uint8_t | ppm_cur_pulse |
| uint32_t | ppm_last_pulse_time |
| bool | ppm_data_valid |
| static uint32_t | timer_rollover_cnt |
| static ICUConfig | ppm_icucfg |
| ICU timer configuration. More... | |
PPM interface between ChibiOS and Paparazzi.
Input capture configuration has to be defined in board.h
Definition in file ppm_arch.c.
|
static |
PPM Overflow callback.
Definition at line 60 of file ppm_arch.c.
|
static |
PPM Pulse period callback.
Definition at line 52 of file ppm_arch.c.
References ppm_decode_frame_width().
Here is the call graph for this function:| void ppm_arch_init | ( | void | ) |
Architecture dependant code.
Definition at line 89 of file ppm_arch.c.
Referenced by radio_control_impl_init().
Here is the caller graph for this function:| uint8_t ppm_cur_pulse |
Definition at line 35 of file ppm_arch.c.
Referenced by ppm_arch_init().
| bool ppm_data_valid |
Definition at line 37 of file ppm_arch.c.
|
static |
ICU timer configuration.
There appears to be no difference between ICU_INPUT_ACTIVE_HIGH and ICU_INPUT_ACTIVE_LOW, it works in both cases. Further investigation needed.
Definition at line 73 of file ppm_arch.c.
Referenced by ppm_arch_init().
| uint32_t ppm_last_pulse_time |
Definition at line 36 of file ppm_arch.c.
Referenced by ppm_arch_init().
|
static |
Definition at line 38 of file ppm_arch.c.
Referenced by ppm_arch_init().
 1.8.8
1.8.8