|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
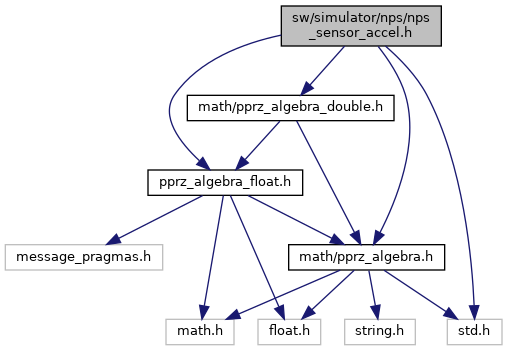
#include "math/pprz_algebra.h"#include "math/pprz_algebra_double.h"#include "math/pprz_algebra_float.h"#include "std.h" Include dependency graph for nps_sensor_accel.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nps_sensor_accel.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | NpsSensorAccel |
Functions | |
| void | nps_sensor_accel_init (struct NpsSensorAccel *accel, double time) |
| void | nps_sensor_accel_run_step (struct NpsSensorAccel *accel, double time, struct DoubleRMat *body_to_imu) |
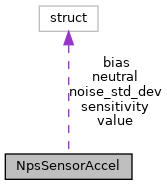
| struct NpsSensorAccel |
Definition at line 9 of file nps_sensor_accel.h.
Collaboration diagram for NpsSensorAccel:| Data Fields | ||
|---|---|---|
| struct DoubleVect3 | bias | |
| bool | data_available | |
| int | max | |
| int | min | |
| struct DoubleVect3 | neutral | |
| double | next_update | |
| struct DoubleVect3 | noise_std_dev | |
| struct DoubleMat33 | sensitivity | |
| struct DoubleVect3 | value | |
|
extern |
Definition at line 8 of file nps_sensor_accel.c.
References NpsSensorAccel::bias, NpsSensorAccel::data_available, FALSE, FLOAT_MAT33_DIAG, FLOAT_VECT3_ZERO, foo, NpsSensorAccel::max, NpsSensorAccel::min, NpsSensorAccel::neutral, NpsSensorAccel::next_update, NpsSensorAccel::noise_std_dev, NpsSensorAccel::sensitivity, time, NpsSensorAccel::value, and VECT3_ASSIGN.
Referenced by nps_sensors_init().
Here is the caller graph for this function:
|
extern |
Definition at line 27 of file nps_sensor_accel.c.
References NpsSensorAccel::bias, NpsFdm::body_accel, NpsSensorAccel::data_available, double_vect3_add_gaussian_noise(), DOUBLE_VECT3_ROUND, fdm, foo, DoubleMat33::m, MAT33_VECT3_MUL, NpsSensorAccel::max, NpsSensorAccel::min, NpsSensorAccel::neutral, NpsSensorAccel::next_update, NpsSensorAccel::noise_std_dev, NpsSensorAccel::sensitivity, TRUE, NpsSensorAccel::value, VECT3_ADD, VECT3_BOUND_CUBE, VECT3_COPY, and VECT3_EW_MUL.
Referenced by nps_sensors_run_step().
Here is the call graph for this function: Here is the caller graph for this function: