|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
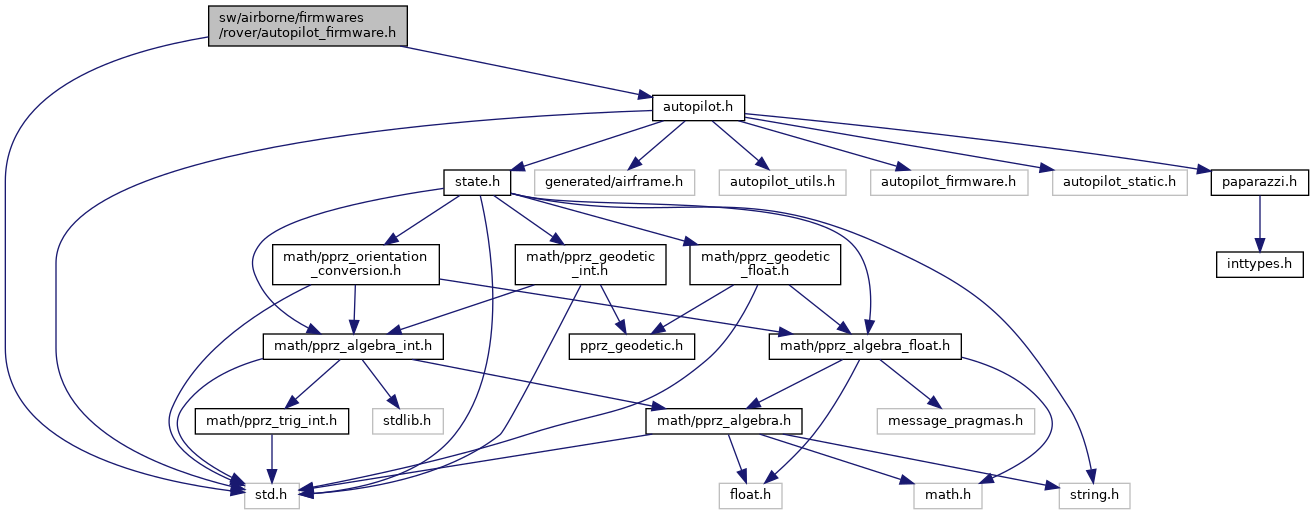
 Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | autopilot_firmware_init (void) |
| Init function. More... | |
Rover specific autopilot interface and initialization
Definition in file autopilot_firmware.h.
| void autopilot_firmware_init | ( | void | ) |
Init function.
Definition at line 114 of file autopilot_firmware.c.
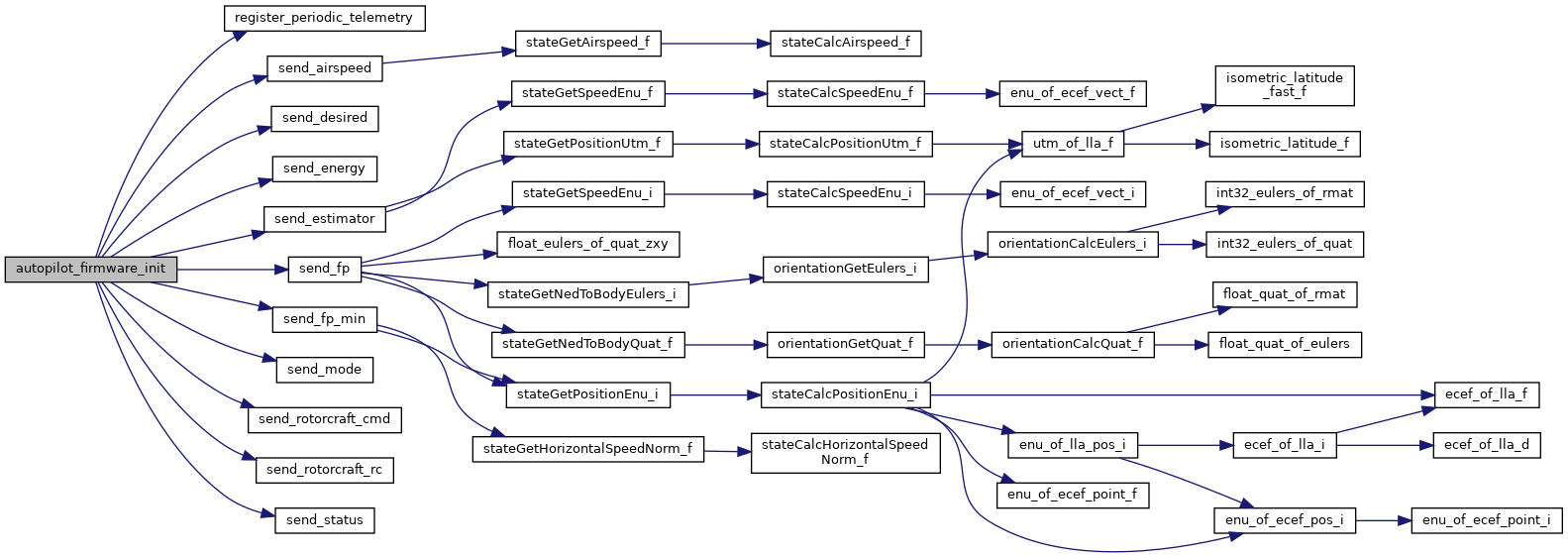
References ap_electrical, autopilot_in_flight_counter, autopilot_mode_auto2, Electrical::bat_critical, Electrical::bat_low, Electrical::charge, Electrical::current, DefaultPeriodic, Electrical::energy, MODE_AUTO2, register_periodic_telemetry(), send_airspeed(), send_desired(), send_energy(), send_estimator(), send_fp(), send_fp_min(), send_mode(), send_rotorcraft_cmd(), send_rotorcraft_rc(), send_status(), and Electrical::vsupply.
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17