|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Estimate velocity from optic flow. More...
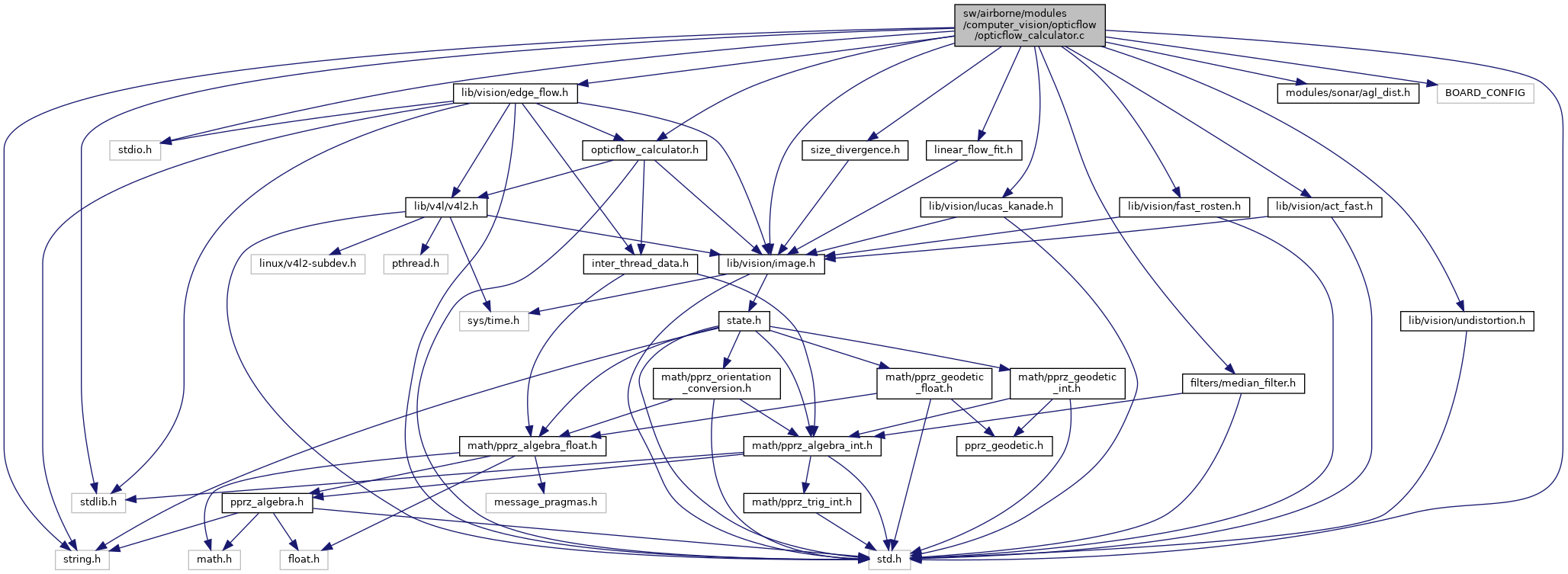
#include "std.h"#include <stdio.h>#include <string.h>#include <stdlib.h>#include "opticflow_calculator.h"#include "lib/vision/image.h"#include "lib/vision/lucas_kanade.h"#include "lib/vision/fast_rosten.h"#include "lib/vision/act_fast.h"#include "lib/vision/edge_flow.h"#include "lib/vision/undistortion.h"#include "size_divergence.h"#include "linear_flow_fit.h"#include "modules/sonar/agl_dist.h"#include <BOARD_CONFIG>#include "filters/median_filter.h" Include dependency graph for opticflow_calculator.c:
Include dependency graph for opticflow_calculator.c:Go to the source code of this file.
Functions | |
| static uint32_t | timeval_diff (struct timeval *starttime, struct timeval *finishtime) |
| Calculate the difference from start till finish. More... | |
| static int | cmp_flow (const void *a, const void *b) |
| Compare two flow vectors based on flow distance Used for sorting. More... | |
| static int | cmp_array (const void *a, const void *b) |
| Compare the rows of an integer (uint16_t) 2D array based on the first column. More... | |
| static void | manage_flow_features (struct image_t *img, struct opticflow_t *opticflow, struct opticflow_result_t *result) |
| static struct flow_t * | predict_flow_vectors (struct flow_t *flow_vectors, uint16_t n_points, float phi_diff, float theta_diff, float psi_diff, struct opticflow_t *opticflow) |
| void | opticflow_calc_init (struct opticflow_t opticflow[]) |
| Initialize the opticflow calculator. More... | |
| bool | calc_fast9_lukas_kanade (struct opticflow_t *opticflow, struct image_t *img, struct opticflow_result_t *result) |
| Run the optical flow with fast9 and lukaskanade on a new image frame. More... | |
| bool | calc_edgeflow_tot (struct opticflow_t *opticflow, struct image_t *img, struct opticflow_result_t *result) |
| Run the optical flow with EDGEFLOW on a new image frame. More... | |
| bool | opticflow_calc_frame (struct opticflow_t *opticflow, struct image_t *img, struct opticflow_result_t *result) |
| Run the optical flow on a new image frame. More... | |
Variables | |
| uint16_t | n_time_steps [2] = {10, 10} |
| uint16_t | n_agents [2] = {25, 25} |
| struct MedianFilter3Float | vel_filt |
| struct FloatRMat | body_to_cam [2] |
Estimate velocity from optic flow.
Definition in file opticflow_calculator.c.
| #define ACT_FAST 1 |
Definition at line 56 of file opticflow_calculator.c.
| #define EXHAUSTIVE_FAST 0 |
Definition at line 55 of file opticflow_calculator.c.
| #define FAST9_HIGH_THRESHOLD 60 |
Definition at line 201 of file opticflow_calculator.c.
| #define FAST9_LOW_THRESHOLD 5 |
Definition at line 200 of file opticflow_calculator.c.
| #define LINEAR_FIT 1 |
Definition at line 66 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_GRADIENT_METHOD 1 |
Definition at line 313 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_GRADIENT_METHOD_CAMERA2 1 |
Definition at line 317 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_LONG_STEP 10 |
Definition at line 293 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_LONG_STEP_CAMERA2 10 |
Definition at line 297 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_MIN_GRADIENT 10 |
Definition at line 323 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_MIN_GRADIENT_CAMERA2 10 |
Definition at line 327 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_SHORT_STEP 2 |
Definition at line 303 of file opticflow_calculator.c.
| #define OPTICFLOW_ACTFAST_SHORT_STEP_CAMERA2 2 |
Definition at line 307 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_PHI 0 |
Definition at line 334 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_PHI_CAMERA2 0 |
Definition at line 344 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_PSI -M_PI_2 |
Definition at line 340 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_PSI_CAMERA2 -M_PI_2 |
Definition at line 350 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_THETA 0 |
Definition at line 337 of file opticflow_calculator.c.
| #define OPTICFLOW_BODY_TO_CAM_THETA_CAMERA2 0 |
Definition at line 347 of file opticflow_calculator.c.
| #define OPTICFLOW_CORNER_METHOD ACT_FAST |
Definition at line 69 of file opticflow_calculator.c.
| #define OPTICFLOW_CORNER_METHOD_CAMERA2 ACT_FAST |
Definition at line 73 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION TRUE |
Definition at line 223 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION_CAMERA2 TRUE |
Definition at line 227 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION_CORRECTION_FACTOR_X 1.0 |
Definition at line 233 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION_CORRECTION_FACTOR_X_CAMERA2 1.0 |
Definition at line 237 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION_CORRECTION_FACTOR_Y 1.0 |
Definition at line 243 of file opticflow_calculator.c.
| #define OPTICFLOW_DEROTATION_CORRECTION_FACTOR_Y_CAMERA2 1.0 |
Definition at line 247 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_ADAPTIVE TRUE |
Definition at line 160 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_ADAPTIVE_CAMERA2 TRUE |
Definition at line 164 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_MIN_DISTANCE 10 |
Definition at line 180 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_MIN_DISTANCE_CAMERA2 10 |
Definition at line 184 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_NUM_REGIONS 9 |
Definition at line 283 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_NUM_REGIONS_CAMERA2 9 |
Definition at line 287 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_PADDING 20 |
Definition at line 190 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_PADDING_CAMERA2 20 |
Definition at line 194 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_REGION_DETECT 1 |
Definition at line 273 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_REGION_DETECT_CAMERA2 1 |
Definition at line 277 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_THRESHOLD 20 |
Definition at line 170 of file opticflow_calculator.c.
| #define OPTICFLOW_FAST9_THRESHOLD_CAMERA2 20 |
Definition at line 174 of file opticflow_calculator.c.
| #define OPTICFLOW_FEATURE_MANAGEMENT 0 |
Definition at line 263 of file opticflow_calculator.c.
| #define OPTICFLOW_FEATURE_MANAGEMENT_CAMERA2 0 |
Definition at line 267 of file opticflow_calculator.c.
| #define OPTICFLOW_MAX_ITERATIONS 10 |
Definition at line 130 of file opticflow_calculator.c.
| #define OPTICFLOW_MAX_ITERATIONS_CAMERA2 10 |
Definition at line 134 of file opticflow_calculator.c.
| #define OPTICFLOW_MAX_TRACK_CORNERS 25 |
Definition at line 80 of file opticflow_calculator.c.
| #define OPTICFLOW_MAX_TRACK_CORNERS_CAMERA2 25 |
Definition at line 84 of file opticflow_calculator.c.
| #define OPTICFLOW_MEDIAN_FILTER FALSE |
Definition at line 253 of file opticflow_calculator.c.
| #define OPTICFLOW_MEDIAN_FILTER_CAMERA2 FALSE |
Definition at line 257 of file opticflow_calculator.c.
| #define OPTICFLOW_METHOD 0 |
Definition at line 205 of file opticflow_calculator.c.
| #define OPTICFLOW_METHOD_CAMERA2 0 |
Definition at line 209 of file opticflow_calculator.c.
| #define OPTICFLOW_PYRAMID_LEVEL 2 |
Definition at line 150 of file opticflow_calculator.c.
| #define OPTICFLOW_PYRAMID_LEVEL_CAMERA2 2 |
Definition at line 154 of file opticflow_calculator.c.
| #define OPTICFLOW_RESOLUTION_FACTOR 100 |
Definition at line 120 of file opticflow_calculator.c.
| #define OPTICFLOW_RESOLUTION_FACTOR_CAMERA2 100 |
Definition at line 124 of file opticflow_calculator.c.
| #define OPTICFLOW_SEARCH_DISTANCE 20 |
Definition at line 100 of file opticflow_calculator.c.
| #define OPTICFLOW_SEARCH_DISTANCE_CAMERA2 20 |
Definition at line 104 of file opticflow_calculator.c.
| #define OPTICFLOW_SHOW_CORNERS 0 |
Definition at line 53 of file opticflow_calculator.c.
| #define OPTICFLOW_SHOW_FLOW FALSE |
Definition at line 368 of file opticflow_calculator.c.
| #define OPTICFLOW_SHOW_FLOW_CAMERA2 FALSE |
Definition at line 372 of file opticflow_calculator.c.
| #define OPTICFLOW_SUBPIXEL_FACTOR 10 |
Definition at line 110 of file opticflow_calculator.c.
| #define OPTICFLOW_SUBPIXEL_FACTOR_CAMERA2 10 |
Definition at line 114 of file opticflow_calculator.c.
| #define OPTICFLOW_THRESHOLD_VEC 2 |
Definition at line 140 of file opticflow_calculator.c.
| #define OPTICFLOW_THRESHOLD_VEC_CAMERA2 2 |
Definition at line 144 of file opticflow_calculator.c.
| #define OPTICFLOW_TRACK_BACK FALSE |
Definition at line 356 of file opticflow_calculator.c.
| #define OPTICFLOW_TRACK_BACK_CAMERA2 FALSE |
Definition at line 360 of file opticflow_calculator.c.
| #define OPTICFLOW_WINDOW_SIZE 10 |
Definition at line 90 of file opticflow_calculator.c.
| #define OPTICFLOW_WINDOW_SIZE_CAMERA2 10 |
Definition at line 94 of file opticflow_calculator.c.
| #define SIZE_DIV 1 |
Definition at line 63 of file opticflow_calculator.c.
| bool calc_edgeflow_tot | ( | struct opticflow_t * | opticflow, |
| struct image_t * | img, | ||
| struct opticflow_result_t * | result | ||
| ) |
Run the optical flow with EDGEFLOW on a new image frame.
| [in] | *opticflow | The opticalflow structure that keeps track of previous images |
| [in] | *state | The state of the drone |
| [in] | *img | The image frame to calculate the optical flow from |
| [out] | *result | The optical flow result |
| computation | successful |
Definition at line 1006 of file opticflow_calculator.c.
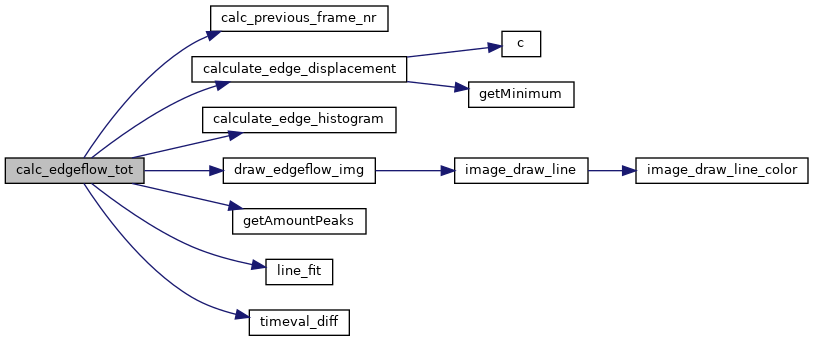
References agl_dist_value_filtered, calc_previous_frame_nr(), calculate_edge_displacement(), calculate_edge_histogram(), opticflow_t::camera, opticflow_result_t::camera_id, video_config_t::camera_intrinsics, opticflow_result_t::corner_cnt, opticflow_t::derotation, opticflow_t::derotation_correction_factor_x, opticflow_t::derotation_correction_factor_y, DISP_RANGE_MAX, opticflow_result_t::div_size, edge_flow_t::div_x, edge_flow_t::div_y, opticflow_result_t::divergence, draw_edgeflow_img(), image_t::eulers, edge_hist_t::eulers, FLOAT_EULERS_ZERO, opticflow_result_t::flow_der_x, opticflow_result_t::flow_der_y, opticflow_result_t::flow_x, edge_flow_t::flow_x, opticflow_result_t::flow_y, edge_flow_t::flow_y, camera_intrinsics_t::focal_x, camera_intrinsics_t::focal_y, opticflow_result_t::fps, edge_hist_t::frame_time, getAmountPeaks(), image_t::h, opticflow_t::id, opticflow_t::just_switched_method, line_fit(), MAX_HORIZON, MAX_WINDOW_SIZE, opticflow_t::median_filter, opticflow_result_t::noise_measurement, opticflow, FloatEulers::phi, RES, opticflow_t::resolution_factor, opticflow_t::search_distance, opticflow_t::show_flow, opticflow_result_t::surface_roughness, FloatEulers::theta, timeval_diff(), opticflow_result_t::tracked_cnt, image_t::ts, UpdateMedianFilterVect3Float, opticflow_result_t::vel_cam, vel_filt, image_t::w, opticflow_t::window_size, FloatVect3::x, edge_hist_t::x, edgeflow_displacement_t::x, FloatVect3::y, edge_hist_t::y, edgeflow_displacement_t::y, and FloatVect3::z.
Referenced by opticflow_calc_frame().
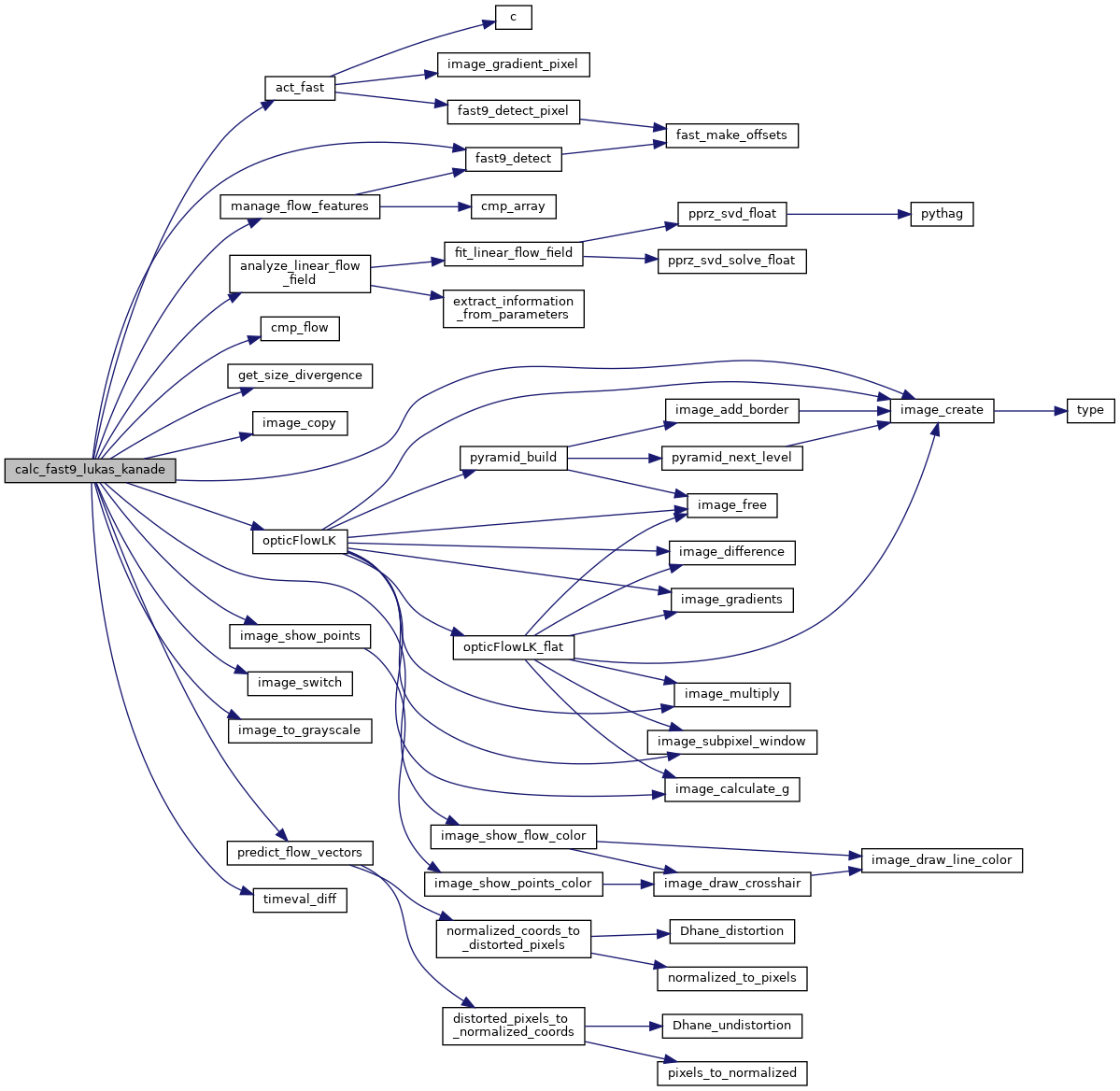
Here is the call graph for this function: Here is the caller graph for this function:| bool calc_fast9_lukas_kanade | ( | struct opticflow_t * | opticflow, |
| struct image_t * | img, | ||
| struct opticflow_result_t * | result | ||
| ) |
Run the optical flow with fast9 and lukaskanade on a new image frame.
| [in] | *opticflow | The opticalflow structure that keeps track of previous images |
| [in] | *state | The state of the drone |
| [in] | *img | The image frame to calculate the optical flow from |
| [out] | *result | The optical flow result |
Definition at line 492 of file opticflow_calculator.c.
References act_fast(), ACT_FAST, opticflow_t::actfast_gradient_method, opticflow_t::actfast_long_step, opticflow_t::actfast_min_gradient, opticflow_t::actfast_short_step, agl_dist_value_filtered, analyze_linear_flow_field(), bottom_camera, opticflow_t::camera, opticflow_result_t::camera_id, video_config_t::camera_intrinsics, cmp_flow(), opticflow_result_t::corner_cnt, opticflow_t::corner_method, point_t::count, opticflow_t::derotation, opticflow_t::derotation_correction_factor_x, opticflow_t::derotation_correction_factor_y, video_config_t::dev_name, opticflow_result_t::div_size, linear_flow_fit_info::divergence, opticflow_result_t::divergence, flow_t::error, image_t::eulers, EXHAUSTIVE_FAST, f, opticflow_t::fast9_adaptive, fast9_detect(), FAST9_HIGH_THRESHOLD, FAST9_LOW_THRESHOLD, opticflow_t::fast9_min_distance, opticflow_t::fast9_padding, opticflow_t::fast9_ret_corners, opticflow_t::fast9_rsize, opticflow_t::fast9_threshold, opticflow_t::feature_management, opticflow_result_t::flow_der_x, opticflow_result_t::flow_der_y, opticflow_result_t::flow_x, flow_t::flow_x, opticflow_result_t::flow_y, flow_t::flow_y, camera_intrinsics_t::focal_x, camera_intrinsics_t::focal_y, opticflow_result_t::fps, get_size_divergence(), opticflow_t::got_first_img, image_t::h, opticflow_t::id, image_copy(), image_create(), IMAGE_GRAYSCALE, image_show_flow_color(), image_show_points(), image_switch(), image_to_grayscale(), opticflow_t::img_gray, InitMedianFilterVect3Float, opticflow_t::just_switched_method, LARGE_FLOW_ERROR, LINEAR_FIT, manage_flow_features(), opticflow_t::max_iterations, opticflow_t::max_track_corners, MEDIAN_DEFAULT_SIZE, opticflow_t::median_filter, n_agents, n_samples, n_time_steps, opticflow_result_t::noise_measurement, opticflow, opticFlowLK(), FloatEulers::phi, flow_t::pos, predict_flow_vectors(), opticflow_t::prev_img_gray, FloatEulers::psi, opticflow_t::pyramid_level, opticflow_t::show_flow, SIZE_DIV, opticflow_t::subpixel_factor, linear_flow_fit_info::surface_roughness, opticflow_result_t::surface_roughness, FloatEulers::theta, opticflow_t::threshold_vec, timeval_diff(), opticflow_t::track_back, opticflow_result_t::tracked_cnt, image_t::ts, UpdateMedianFilterVect3Float, VECT3_ASSIGN, opticflow_result_t::vel_body, opticflow_result_t::vel_cam, vel_filt, image_t::w, opticflow_t::window_size, FloatVect3::x, point_t::x, point_t::x_sub, FloatVect3::y, point_t::y, point_t::y_sub, and FloatVect3::z.
Referenced by opticflow_calc_frame().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Compare the rows of an integer (uint16_t) 2D array based on the first column.
Used for sorting.
| [in] | *a | The first row (should be *uint16_t) |
| [in] | *b | The second flow vector (should be *uint16_t) |
Definition at line 1237 of file opticflow_calculator.c.
References b.
Referenced by manage_flow_features().
Here is the caller graph for this function:
|
static |
Compare two flow vectors based on flow distance Used for sorting.
| [in] | *a | The first flow vector (should be vect flow_t) |
| [in] | *b | The second flow vector (should be vect flow_t) |
Definition at line 1222 of file opticflow_calculator.c.
References b, flow_t::flow_x, and flow_t::flow_y.
Referenced by calc_fast9_lukas_kanade().
Here is the caller graph for this function:
|
static |
Definition at line 892 of file opticflow_calculator.c.
References c1, cmp_array(), opticflow_result_t::corner_cnt, point_t::count, fast9_detect(), opticflow_t::fast9_min_distance, opticflow_t::fast9_num_regions, opticflow_t::fast9_padding, opticflow_t::fast9_region_detect, opticflow_t::fast9_ret_corners, opticflow_t::fast9_rsize, opticflow_t::fast9_threshold, image_t::h, opticflow_t::max_track_corners, opticflow, opticflow_t::prev_img_gray, image_t::w, point_t::x, point_t::x_sub, point_t::y, and point_t::y_sub.
Referenced by calc_fast9_lukas_kanade().
Here is the call graph for this function: Here is the caller graph for this function:| bool opticflow_calc_frame | ( | struct opticflow_t * | opticflow, |
| struct image_t * | img, | ||
| struct opticflow_result_t * | result | ||
| ) |
Run the optical flow on a new image frame.
| [in] | *opticflow | The opticalflow structure that keeps track of previous images |
| [in] | *state | The state of the drone |
| [in] | *img | The image frame to calculate the optical flow from |
| [out] | *result | The optical flow result |
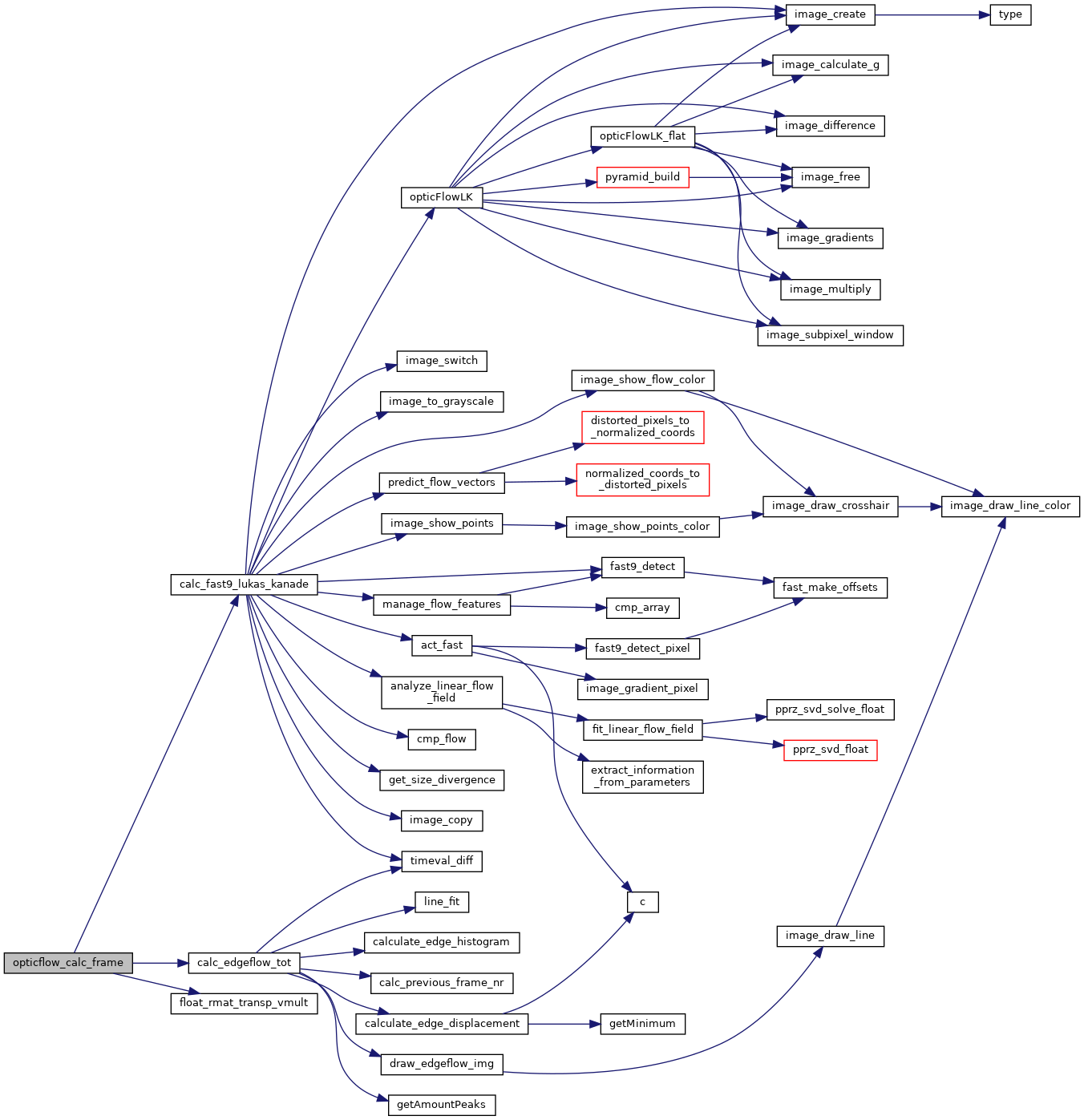
Definition at line 1169 of file opticflow_calculator.c.
References body_to_cam, calc_edgeflow_tot(), calc_fast9_lukas_kanade(), float_rmat_transp_vmult(), opticflow_t::id, opticflow_t::just_switched_method, opticflow_t::method, opticflow, opticflow_result_t::vel_body, and opticflow_result_t::vel_cam.
Referenced by opticflow_module_calc().
Here is the call graph for this function: Here is the caller graph for this function:| void opticflow_calc_init | ( | struct opticflow_t | opticflow[] | ) |
Initialize the opticflow calculator.
| [out] | *opticflow | The new optical flow calculator |
Definition at line 396 of file opticflow_calculator.c.
References opticflow_t::actfast_gradient_method, opticflow_t::actfast_long_step, opticflow_t::actfast_min_gradient, opticflow_t::actfast_short_step, body_to_cam, opticflow_t::camera, opticflow_t::corner_method, opticflow_t::derotation, opticflow_t::derotation_correction_factor_x, opticflow_t::derotation_correction_factor_y, opticflow_t::fast9_adaptive, FAST9_MAX_CORNERS, opticflow_t::fast9_min_distance, opticflow_t::fast9_num_regions, opticflow_t::fast9_padding, opticflow_t::fast9_region_detect, opticflow_t::fast9_ret_corners, opticflow_t::fast9_rsize, opticflow_t::fast9_threshold, opticflow_t::feature_management, float_rmat_of_eulers, opticflow_t::id, opticflow_t::max_iterations, opticflow_t::max_track_corners, opticflow_t::median_filter, opticflow_t::method, opticflow, OPTICFLOW_ACTFAST_GRADIENT_METHOD, OPTICFLOW_ACTFAST_GRADIENT_METHOD_CAMERA2, OPTICFLOW_ACTFAST_LONG_STEP, OPTICFLOW_ACTFAST_LONG_STEP_CAMERA2, OPTICFLOW_ACTFAST_MIN_GRADIENT, OPTICFLOW_ACTFAST_MIN_GRADIENT_CAMERA2, OPTICFLOW_ACTFAST_SHORT_STEP, OPTICFLOW_ACTFAST_SHORT_STEP_CAMERA2, OPTICFLOW_BODY_TO_CAM_PHI, OPTICFLOW_BODY_TO_CAM_PHI_CAMERA2, OPTICFLOW_BODY_TO_CAM_PSI, OPTICFLOW_BODY_TO_CAM_PSI_CAMERA2, OPTICFLOW_BODY_TO_CAM_THETA, OPTICFLOW_BODY_TO_CAM_THETA_CAMERA2, OPTICFLOW_CORNER_METHOD, OPTICFLOW_CORNER_METHOD_CAMERA2, OPTICFLOW_DEROTATION, OPTICFLOW_DEROTATION_CAMERA2, OPTICFLOW_DEROTATION_CORRECTION_FACTOR_X, OPTICFLOW_DEROTATION_CORRECTION_FACTOR_X_CAMERA2, OPTICFLOW_DEROTATION_CORRECTION_FACTOR_Y, OPTICFLOW_DEROTATION_CORRECTION_FACTOR_Y_CAMERA2, OPTICFLOW_FAST9_ADAPTIVE, OPTICFLOW_FAST9_ADAPTIVE_CAMERA2, OPTICFLOW_FAST9_MIN_DISTANCE, OPTICFLOW_FAST9_MIN_DISTANCE_CAMERA2, OPTICFLOW_FAST9_NUM_REGIONS, OPTICFLOW_FAST9_NUM_REGIONS_CAMERA2, OPTICFLOW_FAST9_PADDING, OPTICFLOW_FAST9_PADDING_CAMERA2, OPTICFLOW_FAST9_REGION_DETECT, OPTICFLOW_FAST9_REGION_DETECT_CAMERA2, OPTICFLOW_FAST9_THRESHOLD, OPTICFLOW_FAST9_THRESHOLD_CAMERA2, OPTICFLOW_FEATURE_MANAGEMENT, OPTICFLOW_FEATURE_MANAGEMENT_CAMERA2, OPTICFLOW_MAX_ITERATIONS, OPTICFLOW_MAX_ITERATIONS_CAMERA2, OPTICFLOW_MAX_TRACK_CORNERS, OPTICFLOW_MAX_TRACK_CORNERS_CAMERA2, OPTICFLOW_MEDIAN_FILTER, OPTICFLOW_MEDIAN_FILTER_CAMERA2, OPTICFLOW_METHOD, OPTICFLOW_METHOD_CAMERA2, OPTICFLOW_PYRAMID_LEVEL, OPTICFLOW_PYRAMID_LEVEL_CAMERA2, OPTICFLOW_RESOLUTION_FACTOR, OPTICFLOW_RESOLUTION_FACTOR_CAMERA2, OPTICFLOW_SEARCH_DISTANCE, OPTICFLOW_SEARCH_DISTANCE_CAMERA2, OPTICFLOW_SHOW_FLOW, OPTICFLOW_SHOW_FLOW_CAMERA2, OPTICFLOW_SUBPIXEL_FACTOR, OPTICFLOW_SUBPIXEL_FACTOR_CAMERA2, OPTICFLOW_THRESHOLD_VEC, OPTICFLOW_THRESHOLD_VEC_CAMERA2, OPTICFLOW_TRACK_BACK, OPTICFLOW_TRACK_BACK_CAMERA2, OPTICFLOW_WINDOW_SIZE, OPTICFLOW_WINDOW_SIZE_CAMERA2, opticflow_t::pyramid_level, opticflow_t::resolution_factor, opticflow_t::search_distance, opticflow_t::show_flow, opticflow_t::subpixel_factor, opticflow_t::threshold_vec, opticflow_t::track_back, and opticflow_t::window_size.
Referenced by opticflow_module_init().
Here is the caller graph for this function:
|
static |
Definition at line 821 of file opticflow_calculator.c.
References A, B, opticflow_t::camera, video_config_t::camera_intrinsics, camera_intrinsics_t::center_x, camera_intrinsics_t::center_y, video_config_t::dev_name, camera_intrinsics_t::Dhane_k, distorted_pixels_to_normalized_coords(), flow_t::error, flow_t::flow_x, flow_t::flow_y, camera_intrinsics_t::focal_x, camera_intrinsics_t::focal_y, front_camera, K, LARGE_FLOW_ERROR, normalized_coords_to_distorted_pixels(), opticflow, flow_t::pos, opticflow_t::subpixel_factor, point_t::x, and point_t::y.
Referenced by calc_fast9_lukas_kanade().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Calculate the difference from start till finish.
| [in] | *starttime | The start time to calculate the difference from |
| [in] | *finishtime | The finish time to calculate the difference from |
Definition at line 1207 of file opticflow_calculator.c.
Referenced by calc_edgeflow_tot(), and calc_fast9_lukas_kanade().
Here is the caller graph for this function:| struct FloatRMat body_to_cam[2] |
Definition at line 381 of file opticflow_calculator.c.
Referenced by opticflow_calc_frame(), and opticflow_calc_init().
| uint16_t n_agents[2] = {25, 25} |
Definition at line 59 of file opticflow_calculator.c.
Referenced by act_fast(), and calc_fast9_lukas_kanade().
| uint16_t n_time_steps[2] = {10, 10} |
Definition at line 58 of file opticflow_calculator.c.
Referenced by act_fast(), and calc_fast9_lukas_kanade().
| struct MedianFilter3Float vel_filt |
Definition at line 380 of file opticflow_calculator.c.
Referenced by calc_edgeflow_tot(), and calc_fast9_lukas_kanade().
 1.8.17
1.8.17