|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
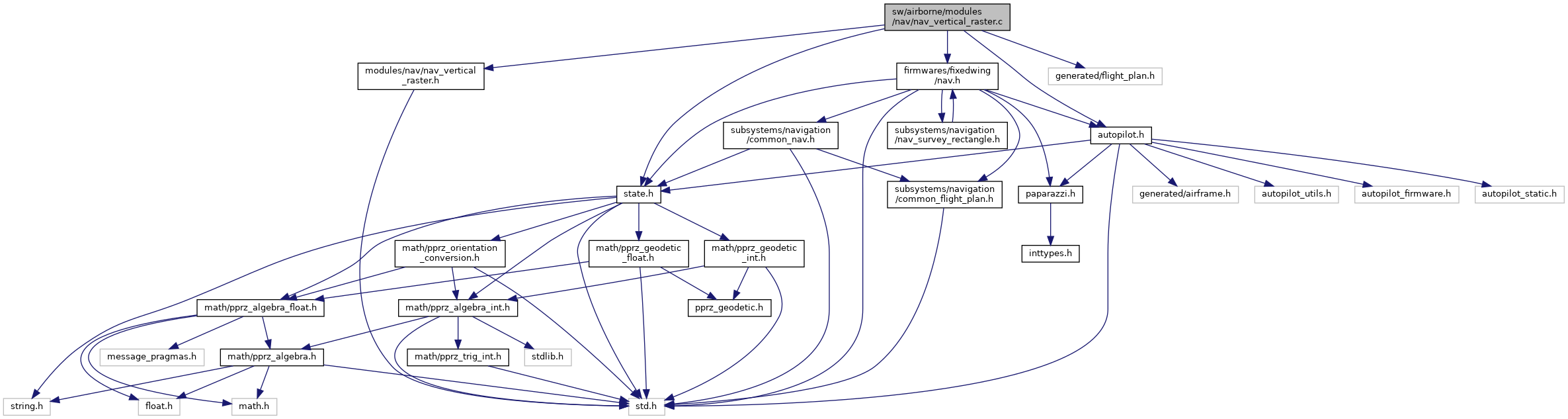
#include "modules/nav/nav_vertical_raster.h"#include "firmwares/fixedwing/nav.h"#include "state.h"#include "autopilot.h"#include "generated/flight_plan.h" Include dependency graph for nav_vertical_raster.c:
Include dependency graph for nav_vertical_raster.c:Go to the source code of this file.
Enumerations | |
| enum | line_status { LR12, LQC21, LTC2, LQC22, LR21, LQC12, LTC1, LQC11, LR12, LQC21, LTC2, LQC22, LR21, LQC12, LTC1, LQC11 } |
| Copy of nav line. More... | |
Functions | |
| void | nav_vertical_raster_setup (void) |
| bool | nav_vertical_raster_run (uint8_t l1, uint8_t l2, float radius, float AltSweep) |
Variables | |
| static enum line_status | line_status |
from OSAM advanced navigation routines
Definition in file nav_vertical_raster.c.
| enum line_status |
Copy of nav line.
The only difference is it changes altitude every sweep, but doesn't come out of circle until it reaches altitude.
| Enumerator | |
|---|---|
| LR12 | |
| LQC21 | |
| LTC2 | |
| LQC22 | |
| LR21 | |
| LQC12 | |
| LTC1 | |
| LQC11 | |
| LR12 | |
| LQC21 | |
| LTC2 | |
| LQC22 | |
| LR21 | |
| LQC12 | |
| LTC1 | |
| LQC11 | |
Definition at line 40 of file nav_vertical_raster.c.
Definition at line 48 of file nav_vertical_raster.c.
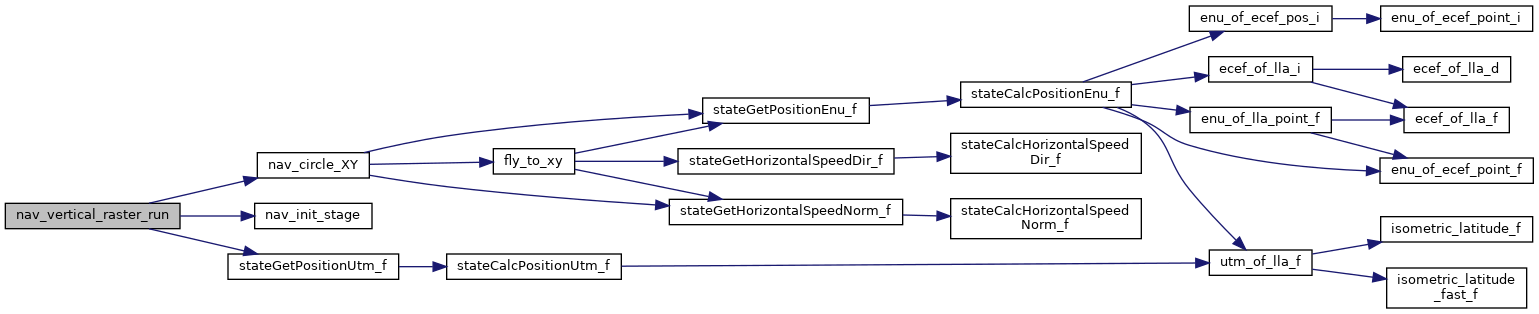
References point::a, CARROT, LQC11, LQC12, LQC21, LQC22, LR12, LR21, LTC1, LTC2, nav_circle_XY(), nav_init_stage(), NavApproachingFrom, NavQdrCloseTo, NavSegment, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, stateGetPositionUtm_f(), WaypointAlt, waypoints, WaypointX, WaypointY, point::x, and point::y.
Here is the call graph for this function:| void nav_vertical_raster_setup | ( | void | ) |
Definition at line 43 of file nav_vertical_raster.c.
References LR12.
|
static |
Definition at line 41 of file nav_vertical_raster.c.
 1.8.17
1.8.17