|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
catapult launch timing system More...
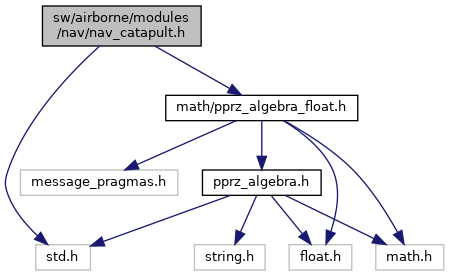
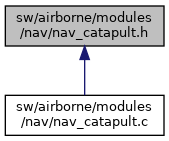
 Include dependency graph for nav_catapult.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_catapult.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | nav_catapult_struct |
Enumerations | |
| enum | nav_catapult_state { NAV_CATAPULT_UNINIT, NAV_CATAPULT_ARMED, NAV_CATAPULT_WAIT_ACCEL, NAV_CATAPULT_MOTOR_ON, NAV_CATAPULT_MOTOR_CLIMB, NAV_CATAPULT_DISARM } |
Functions | |
| void | nav_catapult_init (void) |
| void | nav_catapult_highrate_module (void) |
| bool | nav_catapult_run (uint8_t _climb) |
Variables | |
| struct nav_catapult_struct | nav_catapult |
catapult launch timing system
Definition in file nav_catapult.h.
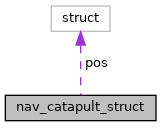
| struct nav_catapult_struct |
Definition at line 53 of file nav_catapult.h.
Collaboration diagram for nav_catapult_struct:| Data Fields | ||
|---|---|---|
| float | accel_threshold | acceleration threshold for launch detection (in g) |
| float | heading_delay | delay to estimate initial heading after launch (in seconds) |
| float | initial_pitch | pitch angle during first take-off phase (in radian) |
| float | initial_throttle | throttle during first take-off phase (in radian) |
| float | motor_delay | delay to start motor after launch detection (in seconds) |
| struct FloatVect3 | pos | catapult position |
| enum nav_catapult_state | status | current procedure state |
| uint32_t | timer | internal timer |
| enum nav_catapult_state |
| Enumerator | |
|---|---|
| NAV_CATAPULT_UNINIT | |
| NAV_CATAPULT_ARMED | |
| NAV_CATAPULT_WAIT_ACCEL | |
| NAV_CATAPULT_MOTOR_ON | |
| NAV_CATAPULT_MOTOR_CLIMB | |
| NAV_CATAPULT_DISARM | |
Definition at line 43 of file nav_catapult.h.
| void nav_catapult_highrate_module | ( | void | ) |
Definition at line 102 of file nav_catapult.c.
References nav_catapult_struct::accel_threshold, autopilot, float_rmat_transp_vmult(), nav_catapult_struct::initial_throttle, pprz_autopilot::launch, MAX_PPRZ, nav_catapult_struct::motor_delay, nav_catapult, NAV_CATAPULT_ACCELERATION_DETECTION, NAV_CATAPULT_ARMED, NAV_CATAPULT_MOTOR_ON, NAV_CATAPULT_TIMEOUT, NAV_CATAPULT_UNINIT, NAV_CATAPULT_WAIT_ACCEL, NavVerticalThrottleMode, stateGetAccelNed_f(), stateGetNedToBodyRMat_f(), nav_catapult_struct::status, nav_catapult_struct::timer, and FloatVect3::x.
Here is the call graph for this function:| void nav_catapult_init | ( | void | ) |
Definition at line 86 of file nav_catapult.c.
References nav_catapult_struct::accel_threshold, nav_catapult_struct::heading_delay, nav_catapult_struct::initial_pitch, nav_catapult_struct::initial_throttle, nav_catapult_struct::motor_delay, nav_catapult, NAV_CATAPULT_ACCELERATION_THRESHOLD, NAV_CATAPULT_HEADING_DELAY, NAV_CATAPULT_INITIAL_PITCH, NAV_CATAPULT_INITIAL_THROTTLE, NAV_CATAPULT_MOTOR_DELAY, NAV_CATAPULT_UNINIT, nav_catapult_struct::status, and nav_catapult_struct::timer.
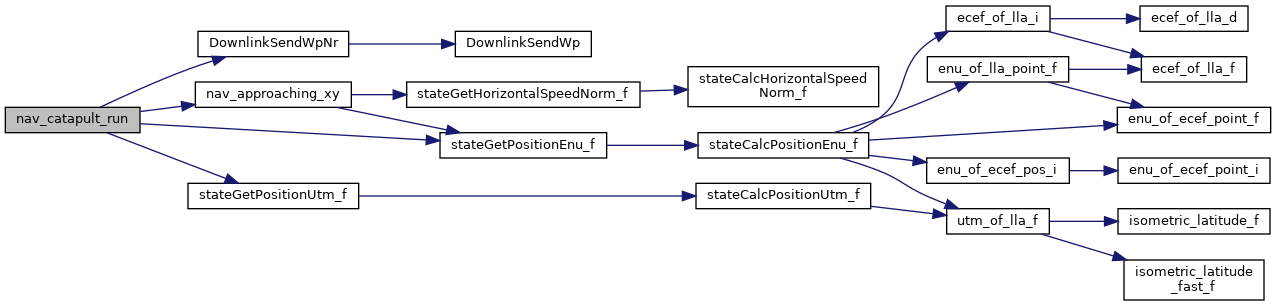
| bool nav_catapult_run | ( | uint8_t | _climb | ) |
Definition at line 159 of file nav_catapult.c.
References UtmCoor_f::alt, DownlinkSendWpNr(), f, nav_catapult_struct::heading_delay, nav_catapult_struct::initial_pitch, nav_catapult_struct::initial_throttle, MAX_PPRZ, nav_approaching_xy(), nav_catapult, NAV_CATAPULT_ARMED, NAV_CATAPULT_CLIMB_DISTANCE, NAV_CATAPULT_DISARM, NAV_CATAPULT_MOTOR_CLIMB, NAV_CATAPULT_MOTOR_ON, NAV_CATAPULT_UNINIT, NAV_CATAPULT_WAIT_ACCEL, NavAttitude, NavGotoWaypoint, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, NavVerticalThrottleMode, nav_catapult_struct::pos, stateGetPositionEnu_f(), stateGetPositionUtm_f(), nav_catapult_struct::status, nav_catapult_struct::timer, WaypointAlt, WaypointX, WaypointY, FloatVect3::x, EnuCoor_f::x, FloatVect3::y, EnuCoor_f::y, and FloatVect3::z.
Here is the call graph for this function:| struct nav_catapult_struct nav_catapult |
Definition at line 83 of file nav_catapult.c.
Referenced by nav_catapult_highrate_module(), nav_catapult_init(), and nav_catapult_run().
 1.8.17
1.8.17