|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
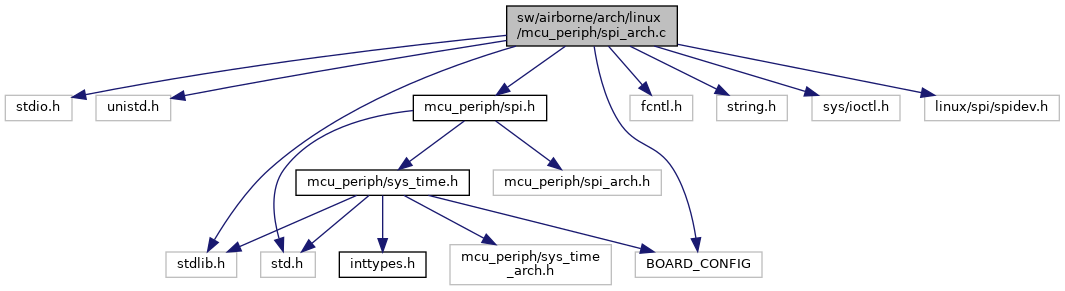
#include <stdio.h>#include <unistd.h>#include <stdlib.h>#include <fcntl.h>#include <string.h>#include <sys/ioctl.h>#include <linux/spi/spidev.h>#include "mcu_periph/spi.h"#include <BOARD_CONFIG> Include dependency graph for spi_arch.c:
Include dependency graph for spi_arch.c:Go to the source code of this file.
Macros | |
| #define | SPI0_MODE (SPI_CPOL | SPI_CPHA) |
| #define | SPI0_LSB_FIRST 0 |
| #define | SPI0_BITS_PER_WORD 8 |
| #define | SPI0_MAX_SPEED_HZ 1000000 |
| #define | SPI1_MODE (SPI_CPOL | SPI_CPHA) |
| #define | SPI1_LSB_FIRST 0 |
| #define | SPI1_BITS_PER_WORD 8 |
| #define | SPI1_MAX_SPEED_HZ 1000000 |
Functions | |
| void | spi_init_slaves (void) |
| Initialize all used slaves and unselect them. More... | |
| bool | spi_submit (struct spi_periph *p, struct spi_transaction *t) |
| Submit a spi transaction. More... | |
| bool | spi_lock (struct spi_periph *p, uint8_t slave) |
| Lock the SPI fifo. More... | |
| bool | spi_resume (struct spi_periph *p, uint8_t slave) |
| Resume the SPI fifo. More... | |
| void | spi0_arch_init (void) |
| Architecture dependent SPI0 initialization. More... | |
| void | spi1_arch_init (void) |
| Architecture dependent SPI1 initialization. More... | |
Handling of SPI hardware for Linux.
Definition in file spi_arch.c.
| #define SPI0_BITS_PER_WORD 8 |
Definition at line 130 of file spi_arch.c.
| #define SPI0_LSB_FIRST 0 |
Definition at line 126 of file spi_arch.c.
| #define SPI0_MAX_SPEED_HZ 1000000 |
Definition at line 134 of file spi_arch.c.
| #define SPI0_MODE (SPI_CPOL | SPI_CPHA) |
Definition at line 122 of file spi_arch.c.
| #define SPI1_BITS_PER_WORD 8 |
Definition at line 186 of file spi_arch.c.
| #define SPI1_LSB_FIRST 0 |
Definition at line 182 of file spi_arch.c.
| #define SPI1_MAX_SPEED_HZ 1000000 |
Definition at line 190 of file spi_arch.c.
| #define SPI1_MODE (SPI_CPOL | SPI_CPHA) |
Definition at line 178 of file spi_arch.c.
 1.8.17
1.8.17