|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
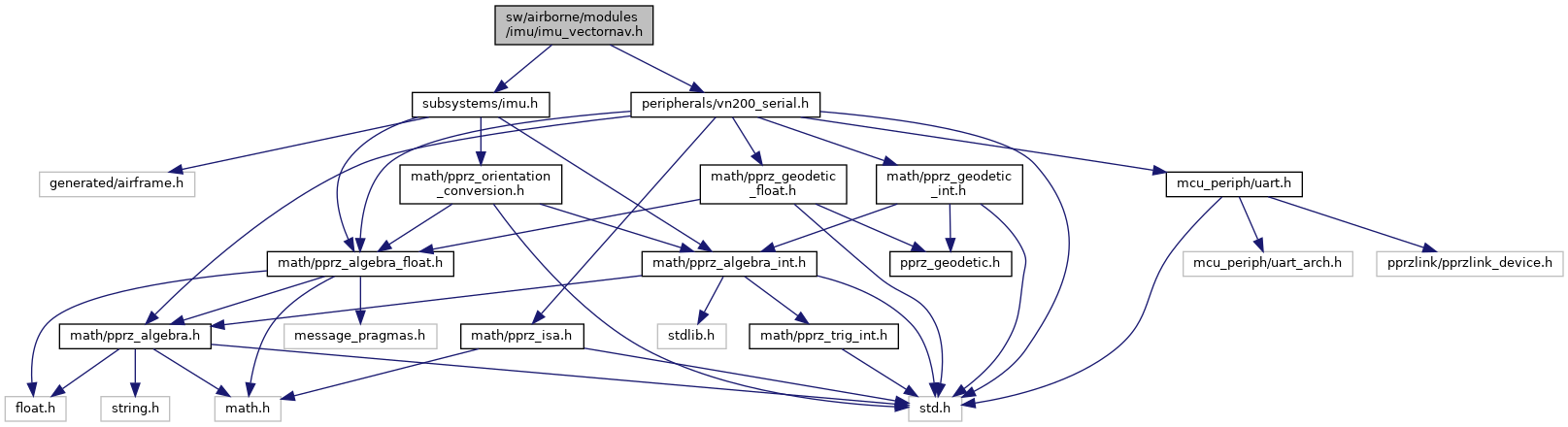
 Include dependency graph for imu_vectornav.h: This graph shows which files directly or indirectly include this file:
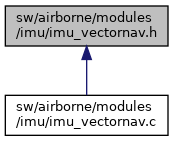
Include dependency graph for imu_vectornav.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ImuVectornav |
Macros | |
| #define | IMU_GYRO_P_SENS_NUM 1 |
| #define | IMU_GYRO_P_SENS_DEN 1 |
| #define | IMU_GYRO_Q_SENS_NUM 1 |
| #define | IMU_GYRO_Q_SENS_DEN 1 |
| #define | IMU_GYRO_R_SENS_NUM 1 |
| #define | IMU_GYRO_R_SENS_DEN 1 |
Functions | |
| void | imu_vectornav_init (void) |
| Init IMU struct and set up ABI messages. More... | |
| void | imu_vectornav_event (void) |
| Event function to read and parse data from the serial port. More... | |
| void | imu_vectornav_periodic (void) |
| Periodic function checks for the frequency of packets, triggers warning in case the IMU stops sending data and performs initial configuration if needed. More... | |
| void | imu_vectornav_propagate (void) |
| Send ABI messages. More... | |
Variables | |
| struct ImuVectornav | imu_vn |
Vectornav VN-200 IMU subsystems, to be used with other AHRS/INS algorithms.
Definition in file imu_vectornav.h.
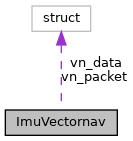
| struct ImuVectornav |
Definition at line 39 of file imu_vectornav.h.
Collaboration diagram for ImuVectornav:| Data Fields | ||
|---|---|---|
| struct VNData | vn_data | Data struct. |
| float | vn_freq | data frequency |
| struct VNPacket | vn_packet | Packet struct. |
| enum VNStatus | vn_status | VN status. |
| #define IMU_GYRO_P_SENS_DEN 1 |
Definition at line 61 of file imu_vectornav.h.
| #define IMU_GYRO_P_SENS_NUM 1 |
Definition at line 57 of file imu_vectornav.h.
| #define IMU_GYRO_Q_SENS_DEN 1 |
Definition at line 69 of file imu_vectornav.h.
| #define IMU_GYRO_Q_SENS_NUM 1 |
Definition at line 65 of file imu_vectornav.h.
| #define IMU_GYRO_R_SENS_DEN 1 |
Definition at line 77 of file imu_vectornav.h.
| #define IMU_GYRO_R_SENS_NUM 1 |
Definition at line 73 of file imu_vectornav.h.
| void imu_vectornav_event | ( | void | ) |
Event function to read and parse data from the serial port.
Definition at line 109 of file imu_vectornav.c.
References imu_vectornav_propagate(), imu_vn, VNPacket::msg_available, vn200_event(), vn200_read_message(), ImuVectornav::vn_data, and ImuVectornav::vn_packet.
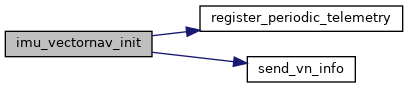
Here is the call graph for this function:| void imu_vectornav_init | ( | void | ) |
Init IMU struct and set up ABI messages.
Definition at line 80 of file imu_vectornav.c.
References VNPacket::chksm_error, DefaultPeriodic, VNPacket::framing_error, VNPacket::hdr_error, imu_vn, VNPacket::msg_available, VNPacket::msg_idx, VNPacket::noise_error, VNPacket::overrun_error, register_periodic_telemetry(), send_vn_info(), VNPacket::status, ImuVectornav::vn_data, ImuVectornav::vn_freq, ImuVectornav::vn_packet, ImuVectornav::vn_status, VNMsgSync, and VNNotTracking.
Here is the call graph for this function:| void imu_vectornav_periodic | ( | void | ) |
Periodic function checks for the frequency of packets, triggers warning in case the IMU stops sending data and performs initial configuration if needed.
Definition at line 128 of file imu_vectornav.c.
References VNPacket::counter, imu_vn, ImuVectornav::vn_freq, ImuVectornav::vn_packet, ImuVectornav::vn_status, VNNotTracking, and VNOK.
| void imu_vectornav_propagate | ( | void | ) |
Send ABI messages.
Definition at line 149 of file imu_vectornav.c.
References Imu::accel, VNData::accel, ACCELS_BFP_OF_REAL, Imu::gyro, VNData::gyro, imu, IMU_VECTORNAV_ID, imu_vn, VNData::nanostamp, RATES_BFP_OF_REAL, and ImuVectornav::vn_data.
Referenced by imu_vectornav_event().
Here is the caller graph for this function:| struct ImuVectornav imu_vn |
Definition at line 40 of file imu_vectornav.c.
Referenced by imu_vectornav_event(), imu_vectornav_init(), imu_vectornav_periodic(), imu_vectornav_propagate(), and send_vn_info().
 1.8.17
1.8.17