|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
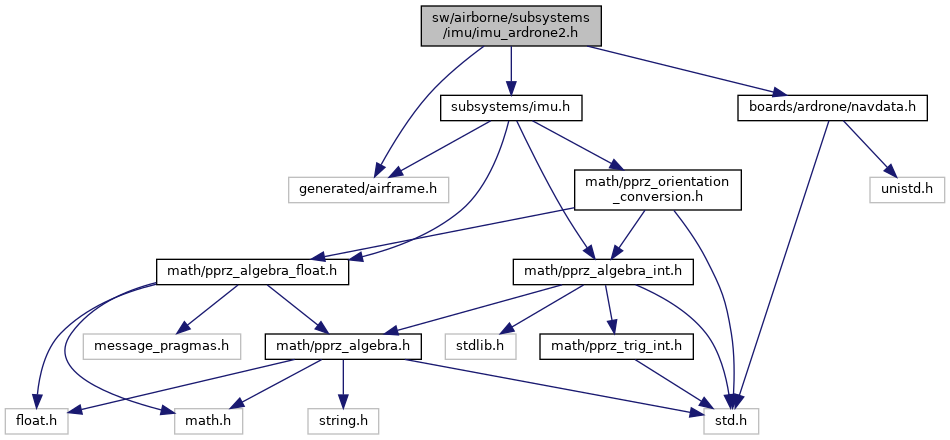
 Include dependency graph for imu_ardrone2.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imu_ardrone2.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | imu_ardrone2_init (void) |
IMU implementation for ardrone2.
Definition in file imu_ardrone2.h.
| #define IMU_ACCEL_X_NEUTRAL 2048 |
Definition at line 65 of file imu_ardrone2.h.
| #define IMU_ACCEL_X_SENS 19.5 |
default accel sensitivy from the datasheet 512 LSB/g
Definition at line 53 of file imu_ardrone2.h.
| #define IMU_ACCEL_X_SENS_DEN 10 |
Definition at line 55 of file imu_ardrone2.h.
| #define IMU_ACCEL_X_SENS_NUM 195 |
Definition at line 54 of file imu_ardrone2.h.
| #define IMU_ACCEL_Y_NEUTRAL 2048 |
Definition at line 66 of file imu_ardrone2.h.
| #define IMU_ACCEL_Y_SENS 19.5 |
Definition at line 56 of file imu_ardrone2.h.
| #define IMU_ACCEL_Y_SENS_DEN 10 |
Definition at line 58 of file imu_ardrone2.h.
| #define IMU_ACCEL_Y_SENS_NUM 195 |
Definition at line 57 of file imu_ardrone2.h.
| #define IMU_ACCEL_Z_NEUTRAL 2048 |
Definition at line 67 of file imu_ardrone2.h.
| #define IMU_ACCEL_Z_SENS 19.5 |
Definition at line 59 of file imu_ardrone2.h.
| #define IMU_ACCEL_Z_SENS_DEN 10 |
Definition at line 61 of file imu_ardrone2.h.
| #define IMU_ACCEL_Z_SENS_NUM 195 |
Definition at line 60 of file imu_ardrone2.h.
| #define IMU_GYRO_P_SENS 4.359 |
default gyro sensitivy and neutral from the datasheet MPU with 2000 deg/s
Definition at line 38 of file imu_ardrone2.h.
| #define IMU_GYRO_P_SENS_DEN 1000 |
Definition at line 40 of file imu_ardrone2.h.
| #define IMU_GYRO_P_SENS_NUM 4359 |
Definition at line 39 of file imu_ardrone2.h.
| #define IMU_GYRO_Q_SENS 4.359 |
Definition at line 41 of file imu_ardrone2.h.
| #define IMU_GYRO_Q_SENS_DEN 1000 |
Definition at line 43 of file imu_ardrone2.h.
| #define IMU_GYRO_Q_SENS_NUM 4359 |
Definition at line 42 of file imu_ardrone2.h.
| #define IMU_GYRO_R_SENS 4.359 |
Definition at line 44 of file imu_ardrone2.h.
| #define IMU_GYRO_R_SENS_DEN 1000 |
Definition at line 46 of file imu_ardrone2.h.
| #define IMU_GYRO_R_SENS_NUM 4359 |
Definition at line 45 of file imu_ardrone2.h.
| #define IMU_MAG_X_SENS 16.0 |
Definition at line 71 of file imu_ardrone2.h.
| #define IMU_MAG_X_SENS_DEN 1 |
Definition at line 73 of file imu_ardrone2.h.
| #define IMU_MAG_X_SENS_NUM 16 |
Definition at line 72 of file imu_ardrone2.h.
| #define IMU_MAG_Y_SENS 16.0 |
Definition at line 74 of file imu_ardrone2.h.
| #define IMU_MAG_Y_SENS_DEN 1 |
Definition at line 76 of file imu_ardrone2.h.
| #define IMU_MAG_Y_SENS_NUM 16 |
Definition at line 75 of file imu_ardrone2.h.
| #define IMU_MAG_Z_SENS 16.0 |
Definition at line 77 of file imu_ardrone2.h.
| #define IMU_MAG_Z_SENS_DEN 1 |
Definition at line 79 of file imu_ardrone2.h.
| #define IMU_MAG_Z_SENS_NUM 16 |
Definition at line 78 of file imu_ardrone2.h.
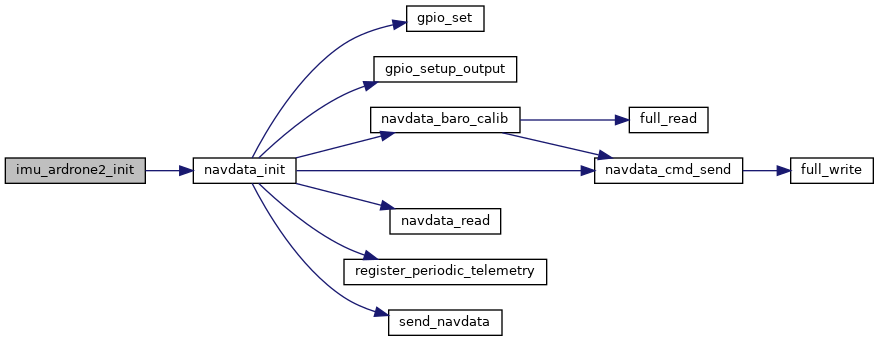
| void imu_ardrone2_init | ( | void | ) |
Definition at line 32 of file imu_ardrone2.c.
References navdata_init().
Here is the call graph for this function: 1.8.17
1.8.17