|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Configure Ublox GPS. More...
#include "std.h"#include "pprzlink/pprzlink_device.h" Include dependency graph for gps_ubx_ucenter.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gps_ubx_ucenter.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gps_ubx_ucenter_struct |
Macros | |
| #define | GPS_UBX_UCENTER_CONFIG_STEPS 19 |
| U-Center Variables. More... | |
Functions | |
| void | gps_ubx_ucenter_init (void) |
| void | gps_ubx_ucenter_periodic (void) |
| void | gps_ubx_ucenter_event (void) |
| int | gps_ubx_ucenter_get_status (void) |
Variables | |
| struct gps_ubx_ucenter_struct | gps_ubx_ucenter |
Configure Ublox GPS.
Definition in file gps_ubx_ucenter.h.
| struct gps_ubx_ucenter_struct |
Definition at line 37 of file gps_ubx_ucenter.h.
Collaboration diagram for gps_ubx_ucenter_struct:| Data Fields | ||
|---|---|---|
| uint32_t | baud_init | |
| uint32_t | baud_run | |
| uint32_t | baud_target | |
| uint8_t | cnt | |
| struct link_device * | dev | |
| uint8_t | gnss_in_use | |
| uint16_t | hw_ver_h | |
| uint16_t | hw_ver_l | |
| uint8_t | port_id | Port identifier number. |
| char | replies[GPS_UBX_UCENTER_CONFIG_STEPS] | |
| uint8_t | reply | |
| uint8_t | status | |
| uint8_t | sw_ver_h | |
| uint8_t | sw_ver_l | |
| #define GPS_UBX_UCENTER_CONFIG_STEPS 19 |
U-Center Variables.
Definition at line 35 of file gps_ubx_ucenter.h.
| void gps_ubx_ucenter_event | ( | void | ) |
Definition at line 159 of file gps_ubx_ucenter.c.
References gps_ubx_ucenter_struct::baud_run, DEBUG_PRINT, gps_ubx_ucenter_struct::gnss_in_use, gps_ubx, gps_ubx_ucenter, GPS_UBX_UCENTER_REPLY_ACK, GPS_UBX_UCENTER_REPLY_CFG_PRT, GPS_UBX_UCENTER_REPLY_NACK, GPS_UBX_UCENTER_REPLY_VERSION, GPS_UBX_UCENTER_STATUS_STOPPED, gps_ubx_ucenter_struct::hw_ver_h, gps_ubx_ucenter_struct::hw_ver_l, GpsUbx::msg_buf, GpsUbx::msg_class, GpsUbx::msg_id, gps_ubx_ucenter_struct::port_id, gps_ubx_ucenter_struct::reply, gps_ubx_ucenter_struct::status, gps_ubx_ucenter_struct::sw_ver_h, and gps_ubx_ucenter_struct::sw_ver_l.
| int gps_ubx_ucenter_get_status | ( | void | ) |
Definition at line 619 of file gps_ubx_ucenter.c.
References gps_ubx_ucenter, and gps_ubx_ucenter_struct::status.
| void gps_ubx_ucenter_init | ( | void | ) |
Definition at line 72 of file gps_ubx_ucenter.c.
References gps_ubx_ucenter_struct::baud_init, gps_ubx_ucenter_struct::baud_run, gps_ubx_ucenter_struct::baud_target, gps_ubx_ucenter_struct::cnt, gps_ubx_ucenter_struct::dev, gps_ubx_ucenter, GPS_UBX_UCENTER_CONFIG_STEPS, GPS_UBX_UCENTER_REPLY_NONE, GPS_UBX_UCENTER_STATUS_AUTOBAUD, gps_ubx_ucenter_struct::hw_ver_h, gps_ubx_ucenter_struct::hw_ver_l, gps_ubx_ucenter_struct::replies, gps_ubx_ucenter_struct::reply, gps_ubx_ucenter_struct::status, gps_ubx_ucenter_struct::sw_ver_h, gps_ubx_ucenter_struct::sw_ver_l, and UBX_GPS_BAUD.
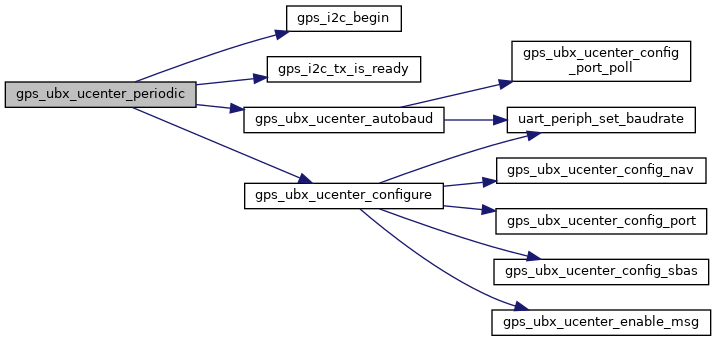
| void gps_ubx_ucenter_periodic | ( | void | ) |
Definition at line 100 of file gps_ubx_ucenter.c.
References gps_ubx_ucenter_struct::baud_init, gps_ubx_ucenter_struct::cnt, DEBUG_PRINT, FALSE, gps_i2c_begin(), gps_i2c_tx_is_ready(), gps_ubx_ucenter, gps_ubx_ucenter_autobaud(), gps_ubx_ucenter_configure(), GPS_UBX_UCENTER_STATUS_AUTOBAUD, GPS_UBX_UCENTER_STATUS_CONFIG, GPS_UBX_UCENTER_STATUS_STOPPED, GPS_UBX_UCENTER_STATUS_WAITING, and gps_ubx_ucenter_struct::status.
Here is the call graph for this function:| struct gps_ubx_ucenter_struct gps_ubx_ucenter |
Definition at line 66 of file gps_ubx_ucenter.c.
Referenced by gps_ubx_ucenter_autobaud(), gps_ubx_ucenter_config_nav(), gps_ubx_ucenter_config_port(), gps_ubx_ucenter_config_port_poll(), gps_ubx_ucenter_config_sbas(), gps_ubx_ucenter_configure(), gps_ubx_ucenter_enable_msg(), gps_ubx_ucenter_event(), gps_ubx_ucenter_get_status(), gps_ubx_ucenter_init(), and gps_ubx_ucenter_periodic().
 1.8.17
1.8.17