|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
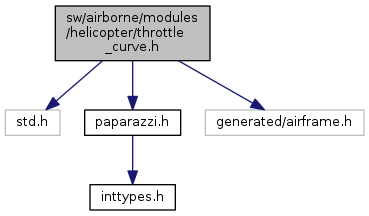
 Include dependency graph for throttle_curve.h: This graph shows which files directly or indirectly include this file:
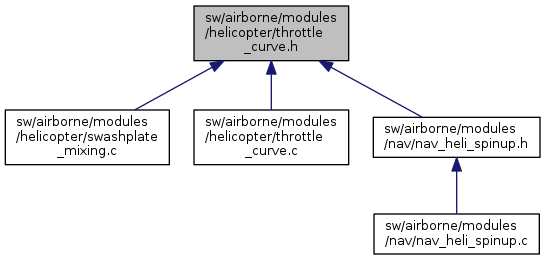
Include dependency graph for throttle_curve.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | curve_t |
| struct | throttle_curve_t |
Functions | |
| void | throttle_curve_init (void) |
| Initialize the default throttle curve values. More... | |
| void | throttle_curve_run (pprz_t in_cmd[], uint8_t autopilot_mode) |
| Run the throttle curve and generate the output throttle and pitch This depends on the FMODE(flight mode) and TRHUST command. More... | |
| void | nav_throttle_curve_set (uint8_t mode) |
| Set a specific throttle curve based on the mode given with this function. More... | |
Variables | |
| struct throttle_curve_t | throttle_curve |
Definition in file throttle_curve.h.
| struct curve_t |
Definition at line 35 of file throttle_curve.h.
| Data Fields | ||
|---|---|---|
| int16_t | collective[THROTTLE_POINTS_NB] | The collective points in the curve. |
| uint8_t | nb_points | The number of points in the curve. |
| uint16_t | rpm[THROTTLE_POINTS_NB] | RPM points in the curve. |
| uint16_t | throttle[THROTTLE_POINTS_NB] | Throttle points in the curve. |
| struct throttle_curve_t |
Definition at line 43 of file throttle_curve.h.
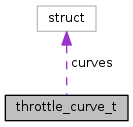
Collaboration diagram for throttle_curve_t:| Data Fields | ||
|---|---|---|
| int32_t | coll_trim | Collective trim. |
| int16_t | collective | Output collective of the throttle curve. |
| struct curve_t | curves[THROTTLE_CURVES_NB] | Throttle/pitch curves. |
| uint8_t | mode | Flight mode. |
| uint8_t | nav_mode | Nav Flight mode. |
| uint8_t | nb_curves | The number of throttle/pitch curves. |
| uint16_t | rpm | Output RPM of the throttle curve. |
| float | rpm_err_sum | Summed RPM error. |
| float | rpm_fb_i | |
| float | rpm_fb_p | RPM feedback p gain. |
| uint16_t | rpm_meas | RPM measured. |
| bool | rpm_measured | Whenever the RPM is measured. |
| uint16_t | throttle | Output thrust(throttle) of the throttle curve. |
| int32_t | throttle_trim | RPM feedback i gain. |
| void nav_throttle_curve_set | ( | uint8_t | mode | ) |
Set a specific throttle curve based on the mode given with this function.
Definition at line 208 of file throttle_curve.c.
References mode, and throttle_curve_t::nav_mode.
| void throttle_curve_init | ( | void | ) |
Initialize the default throttle curve values.
Definition at line 79 of file throttle_curve.c.
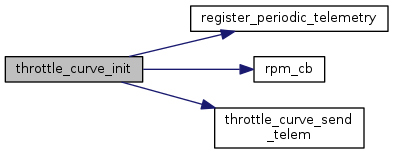
References throttle_curve_t::coll_trim, curve_t::collective, throttle_curve_t::collective, throttle_curve_t::curves, DefaultPeriodic, throttle_curve_t::mode, throttle_curve_t::nav_mode, register_periodic_telemetry(), rpm_cb(), throttle_curve_t::rpm_err_sum, throttle_curve_t::rpm_fb_i, throttle_curve_t::rpm_fb_p, throttle_curve_t::rpm_measured, curve_t::throttle, throttle_curve_t::throttle, THROTTLE_CURVE_RPM_FB_I, THROTTLE_CURVE_RPM_FB_P, THROTTLE_CURVE_RPM_ID, throttle_curve_send_telem(), and throttle_curve_t::throttle_trim.
Here is the call graph for this function:Run the throttle curve and generate the output throttle and pitch This depends on the FMODE(flight mode) and TRHUST command.
Definition at line 115 of file throttle_curve.c.
References AP_MODE_FAILSAFE, AP_MODE_NAV, autopilot_get_motors_on(), throttle_curve_t::coll_trim, curve_t::collective, throttle_curve_t::collective, throttle_curve_t::curves, MAX_PPRZ, throttle_curve_t::mode, mode, throttle_curve_t::nav_mode, curve_t::nb_points, radio_control, curve_t::rpm, throttle_curve_t::rpm, throttle_curve_t::rpm_err_sum, throttle_curve_t::rpm_fb_i, throttle_curve_t::rpm_fb_p, throttle_curve_t::rpm_meas, throttle_curve_t::rpm_measured, curve_t::throttle, throttle_curve_t::throttle, THROTTLE_CURVE_RPM_INC_LIMIT, THROTTLE_CURVE_SWITCH_VAL, throttle_curve_t::throttle_trim, and RadioControl::values.
Referenced by main_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| struct throttle_curve_t throttle_curve |
Definition at line 60 of file throttle_curve.c.
 1.8.8
1.8.8